Автоматизированные системы в неразрушающем контроле
Опубликовано 09.12.2019 в ChSU
Тепло приветствую Вас на страницах моего небольшого пособия, которое расскажет об автоматизированных системах в неразрушающем контроле. А если быть точным - мы рассмотрим некоторые системы различных датчиков. При этом, чтобы представлять место данных систем в реальном мире, будет рассмотрена промышленная автоматизация и контроль в целом.
В рамках настоящего пособия я постараюсь максимально использовать английский язык, поскольку большинство научно-технической литературы сегодня пишется именно на нем. Можно сказать что английский является международным инженерным языком.
Буду очень признателен за обратную связь по этому небольшому проекту. О любых замечаниях и предложениях Вы можете написать на электронный адрес Dm.Yunoviodv@gmail.com
Оглавление
- Введение
- Архитектура систем промышленной автоматизации
- Основные характеристики измерительных систем
- Измерения температуры
- Измерения давления и силы
- Смещение и скорость
- Измерение потока
- Измерение уровня, влажности и рН
- Цепи передачи сигнала
- Заключение
1. Введение
В данном разделе приведены некоторые основные принципы и понятия, с которыми мы будем работать. В результате раскроем следующие вещи:
- определение автоматизации, управления и информационных технологий (ИТ);
- какая связь существует между приведенными в предыдущем пункте параметрами и как они связаны с производством;
- концепция "жизненного цикла продукта", а также понимание роли автоматизации и контроля в данном цикле;
- классификация производственных предприятий и систем автоматизации.
Но для начала немного терминологии (верхний уровень нашего курса). Инженерная наука является дискретной дисциплиной со своим языком, задачами и инструментами (как и многие другие науки, искусство, религия или философия - везде есть свои "языки" общения). Основной вопрос инженера:
Как я могу решить данную проблему?
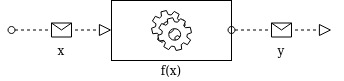
Это приводит нас к типичному представлению системы, как "черного ящика" (неизвестно и не важно, что внутри, важно - как заставить это работать). Такой подход позволяет нам не задумываться о внутреннем устройстве системы, а сосредоточится на входящих и выходящих данных, а так же взаимосвязи между ними и общей системой (можно сказать, рассматриваем потоки информации). Это очень похоже на программирование. Каждый элемент системы (или устройство) будет порождать конкретный выход из конкретного входа (рис. 1.1).
|
Рис. 1.1. Концепция черного ящика. |
Другой важной особенностью инженерной науки являются ее специальные инструменты. Как правило, визуального представления информации:
- технические чертежи и списки деталей,
- схемы,
- блок-схемы и программы,
- технические планы и принципиальные схемы.
Думаю с подробностями вы уже познакомились в процессе своего обучения инженерному делу.
Контроль, автоматизация, робототехника и измерительная техника имеют первостепенное значение для развития промышленности, особенно в течении последних десятилетий. Даже в настоящее время идет процесс реиндустриализации стран - и он никогда и не останавливался (сейчас это Индустрия 4.0). Таким образом, автоматизация - это всегда актуальная тема, начиная с 18 века (вспомним дядюшку Форда).
На мой взгляд одной из основных проблем автоматизации и контроля сегодня является комплексный и интеллектуальный анализ информации. А для него необходимо быстрое и понятное получение информации из различных источников и ее качественная обработка. Все это непосредственно связано с принятием решений, неразрушающем контролем и автоматизацией способов получения информации (и это относится не только к промышленным системам)
Обособленной проблемой стоит описание "хаоса" - множества нелинейных динамических систем (то.что мы называем нормальным распределением). Вопреки линейным динамическим системам (которые можно решить "аналитически" и с которыми работают дифференциальные уравнения), хаотические системы крайне чувствительны к окружающим условиям и системным параметрам. Для таких систем были введены в работу нелинейные методы и многокомпонентные методы машинного обучения и анализа "больших данных". В нашем же курсе мы будем рассматривать только простейшие случаи, относящиеся к неразрушающему контролю и способам получения информации с точки зрения физических сенсоров.
Примечание. Именно из-за повсеместного наличия "хаоса" за счет множественного наложения нелинейных динамических систем мы повсюду встречаем нормальное распределение вероятности событий в окружающем нас мире. Так-то.
Вообще, описание системы и последующий контроль - это проверка соответствия реальных параметров объекта установленным техническим требованиям (в специально выбранных точках). При этом в промышленности часто востребован именно неразрушающий контроль, поскольку важно не мешать техническому процессу и обеспечить его "замкнутость" (в меньшей степени важно еще и сохранить продукт). К неразрушающим методам относятся:
- органолептический контроль (визуальный, на цвет и запах),
- спектроскопия (УФ, ИК и рентгеновского диапазона волн),
- ультразвуковой анализ,
- контроль температуры,
- контроль давления,
- и т.д. (практически все простые физические параметры можно контролировать без разрушения вещества)*
* сложнее дело обстоит с более высоким уровнем анализа - химическим, биологическим, социальным и т.д.
Примечание. Обратите внимание, что все перечисленные методы относятся к "низкоуровневому" контролю физических величин. Гораздо сложнее дело обстоит с автоматизированным контролем более "сложных свойств". К таким свойствам например относится цвет, химический состав, растворимость, цена, спрос и т.д. Тут уже важно применять сложные методы непрямого контроля и только лишь сенсорами не обойтись.
Все перечисленные выше сложные названия и методы по сути сводятся к тем или иным датчикам (или сенсорам), которые устанавливаются в производственных условиях. Полученные данные используют для определения целевых параметров с использованием различных инструкций, методик и стандартов (нормативная документация). Иными словами - анализируют. Все это еще раз подтверждает факт того, что мы окружены данными. Да и сами по сути является данными, которые пока не очень хорошо умеем обрабатывать. А все, что нам остается - наблюдать и экспериментировать, чтобы по результатам анализа строить гипотезы и теории, открывать законы. Ну и контролировать помышленное производство конечно же.
Когда мы анализируемые полученные при контроле параметры, то принято делить их на 3 типа (сразу скажу, что не всегда такое деление используется и конечно же оно не единственное).
-
Функциональные параметры - характеризующие работу системы или процесса (действующее усилие, напряжения, давление жидкости в гидросистеме, время разгона/торможения, удельный расход энергии и т.д.) - определяют процесс в целом, не дают возможность конкретизировать его стадии.
-
Структурные параметры - непосредственно характеризуют состояние конкретных стадий процесса или узлов оборудования (координаты положения элементов, коррозия и т.д.) - как правило, требуют проведение процесса в специальных условиях или разборки оборудования.
-
Параметры сопутствующих процессов - определяемые из внешних условий и процессов, сопутствующих целевому процессу или оборудованию (температура, вибрация, акустические сигналы, уровень и спектр шумов, погрешность обработки) - наиболее распространены для измерений.
Результатами контроля являются данные (количественные, ранговые или качественные), которые мы можем получить через специального вида взаимосвязи (для этого строят функции системы от времени, как правило - непрерывные с общей запись вида \(K_J(t)\)). Кроме того для результатов обязательно указывают размерность и установленные/допустимые отклонения (погрешности). Также важно понятие чувствительности процедуры измерения (параметр \(K\) в формуле) к измеряемому параметру (\(Q\)): \(\frac{dK}{dQ}\).
Задача. Подумайте, как выражается геометрический смысл чувствительности, другими словами как можно визуально представить чувствительность метода? Чтобы помочь себе - нарисуйте график \(K_J(t) = aQ_J(t) + b\) для чувствительной и не чувствительной системы (параметры можете выбрать случайным образом).
Различают так же некоторые средства контроля: аппаратные, программные, ручные и автоматизированные, специализированные или универсальные.
Началом же неразрушающего контроля и диагностики принято считать открытие в ноябре 1895г. рентгеновских лучей (X-rays), которые позволили обнаружить металлический предмет в закрытой деревянной коробке (по тем временам это произвело фурор похлеще чем презентация новых айфонов).
Если вы представили себе как выглядит чувствительность, то становится понятно, что точность работы систем контроля зависит именно от чувствительности. Однако точность зависит и еще от нескольких важных параметров - разрешающей способности компонентов (характеризует способность отличить между собой два близких сигнала) и точности алгоритмов обработки всей получаемой информации. Кроме того, немаловажным фактором является точность калибровки измерительной системы (но это немного другое).
Задача. Подумайте, как в общем случае связаны между собой чувствительность и разрешающая способность. Всегда ли хорошо, когда наш график очень чувствительный?
Дополнительно отметим, что сегодня во многих системах функции оператора (человек) являются во многом определяющими и достаточно сложными для автоматизации. В частности по этому системы автоматического (машинного) принятия решений еще не получили широкого распространения и эта проблема очень актуальна в настоящее время.
Таким образом, я бы сказал, что сегодня существуют четыре важных направления развития автоматизированных методов контроля:
-
Машинное обучение методам и средствам анализа (интеллектуализация). Поиск функциональных метрик качества.
-
Разработка единой системы контроля качества технических объектов и окружающей среды (стандартизация).
-
Совершенствование диагностики (аппаратная и программная часть).
-
Стандартизация и внедрение систем контроля на местах (нормативная документация).
В нашем случае - мы рассмотрим 3 пункт с точки зрения его физических основ. А именно какие способы неразрушающего контроля промышленных процессов существуют на сегодняшний день с точки зрения различных сенсоров. Но для начала дополним нашу базу терминов следующими понятиями.
В основе любой системы контроля лежит процесс измерения. Он представляет собой процедуру определения неизвестного численного значения через сравнение с эталоном в определенных единицах измерения (это же относится и к калибровочным кривым и т.п. - везде в основе лежат эталоны).
Промышленность (Industry) - систематическая деятельность, которая может быть связана с производством/услугами/торговлей (нас будет интересовать только производство).
Автоматизация (automation) - набор технологий, обеспечивающий управление машинами и системами без значительного вмешательства человека (при этом в идеале должна быть увеличена производительность и экономический эффект по сравнению с ручным трудом).
Управление и контроль (Management and Control) - набор технологий, обеспечивающий получение желаемых выходных параметров для систем и машин через выставление входных параметров. Обычно, это процесс обработки информации с целью определения какого-либо события.
Сенсоры (Sensors) - устройства, осуществляющие функции измерения, счета и т.п., с целью получения информации. Часто еще сенсор называют датчиком, что является синонимом (однако некоторые специалисты любят утверждать, что датчик это более сложная структура, которая включает в себя сенсор с "обвесом").
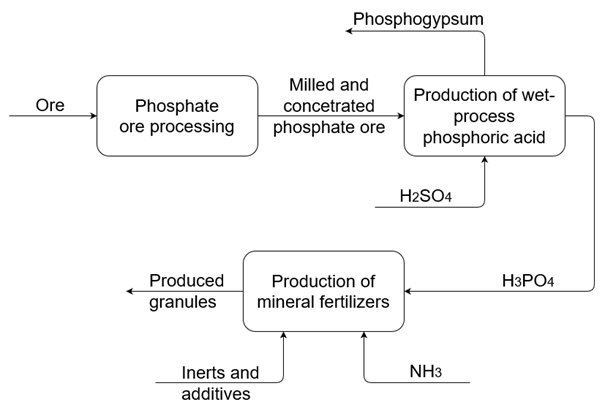
В рамках настоящего курса мы будем в основном рассматривать особенности аппаратной реализации неразрушающего контроля и некоторые общие понятия автоматизации в современной индустрии. Кроме того, в область моей профессиональной деятельности довольно долгое время входило обеспечение контроля на производстве минеральных удобрений, и я постараюсь приводить побольше конкретных примеров из данной области (рис. 1.2).
|
Рис. 1.2. Структура промышленного производства минеральных удобрений. |
Задача. Чтобы лучше усвоить терминологию, потренируйтесь описать любой конкретный процесс в обозначенных терминах (например, управления температурой в паровом котле, включение и регулирование газовой комфорки и т.п.).
Кроме того, важно понимать, как связаны системы автоматизации и системы управления и контроля.
- Системы автоматизации могут включать в себя системы управления и контроля, но обратное неверно.
- Главная функция систем управления и контроля - следить за тем, чтобы выходной сигнал соответствовал значениям входного (иными словами, подчинялся заданной функциональной зависимости). При этом системы автоматизации могут выполнять бОльший функционал (вычислять "точки воздействия" для систем контроля, мониторить производительность системы, производить остановку и запуск производства, составлять и контролировать расписание работ и оборудования и т.д.).
Задача. Приведите пример автоматической системы, в которую выходит система контроля (интернет в помощь).
Помимо различных систем управления и контроля системы промышленной автоматизации широко используют возможности программирования и информационных технологий (ИТ, рис. 1.3).

|
Рис. 1.3. Основные области ИТ, используемые в промышленной автоматизации. |
Задача. Попробуйте найти конкретные примеры использования ИТ в автоматизированных системах (интернет в помощь).
Но важно понимать, что промышленная автоматизация отличается от ИТ.
- Промышленная автоматизация включает в себя значительное количество аппаратных технологий (приборы, датчики, двигатели, электроника для формирования сигнала и т.д.).
- Системы автоматизации низкого уровня используют ИТ в меньшей степени, больше работая с аппаратным обеспечением, электроникой и встроенными вычислениями (например, сенсоры и актуаторы).
1.3 Автоматизация в промышленности (роль и типы)
Принято считать, что основными целями использования автоматизации в промышленности являются:
- повышение качества и безопасности производства (минимизация ошибки за счет человеческого фактора);
- увеличение экономического эффекта производства (... profit).
Сам экономический эффект выражается следующим образом:
Автоматизация влияет на соотношение стоимости (с позиции затрат на производство) к количеству продукции, позволяя оптимизировать этот параметр (прибыль предприятия может быть увеличена за счет производства большего объема более качественной продукции при уменьшении производственных и временных затрат). Таким образом автоматизация влияет на экономику с позиции:
- масштаба (economy of scale) - снижение затрат на единицу продукции (за счет увеличения объема производства, повышения операционной и временной эффективности);
- цели (области применения, economy of scope) - когда может производить более широкий ассортимент.
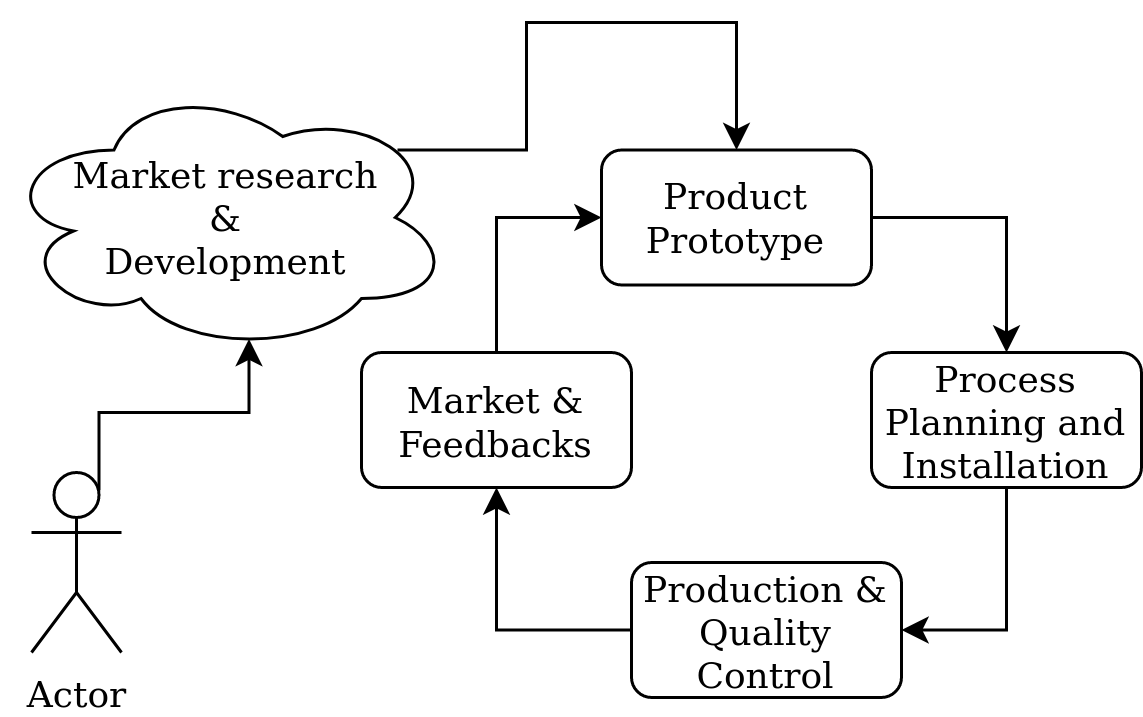
Типичный жизненный цикл продукта приведен на рис. 1.4.
|
Рис. 1.4. Типичный жизненный цикл продукта. |
На первой стадии создается идея продукции на основе исследования рынков, спроса и активов. Затем создается макет производства и изготавливается прототип продукта. После проверки работоспособности производства и пригодности прототипа проводится масштабирование производства и его монтажа, чтобы убедиться в наличие необходимых ресурсов и технологий для массового производства. Затем идет непосредственное массовое производство и контроль качества продукции. Производимый продукт поступает на рынок, с которого приходит соответствующий ответ (feedback), на основании которого производство эволюционирует (наращивает мощности или меняет продукт).
Задача. Где здесь можно использовать автоматизацию и какие преимущества она дает?
Задача. Приведите примеры отраслей: где 1 - экономия масштаба важнее, чем экономия цели; 2 - наоборот и 3 - они равнозначны.
1.3.1 Типы производственных систем
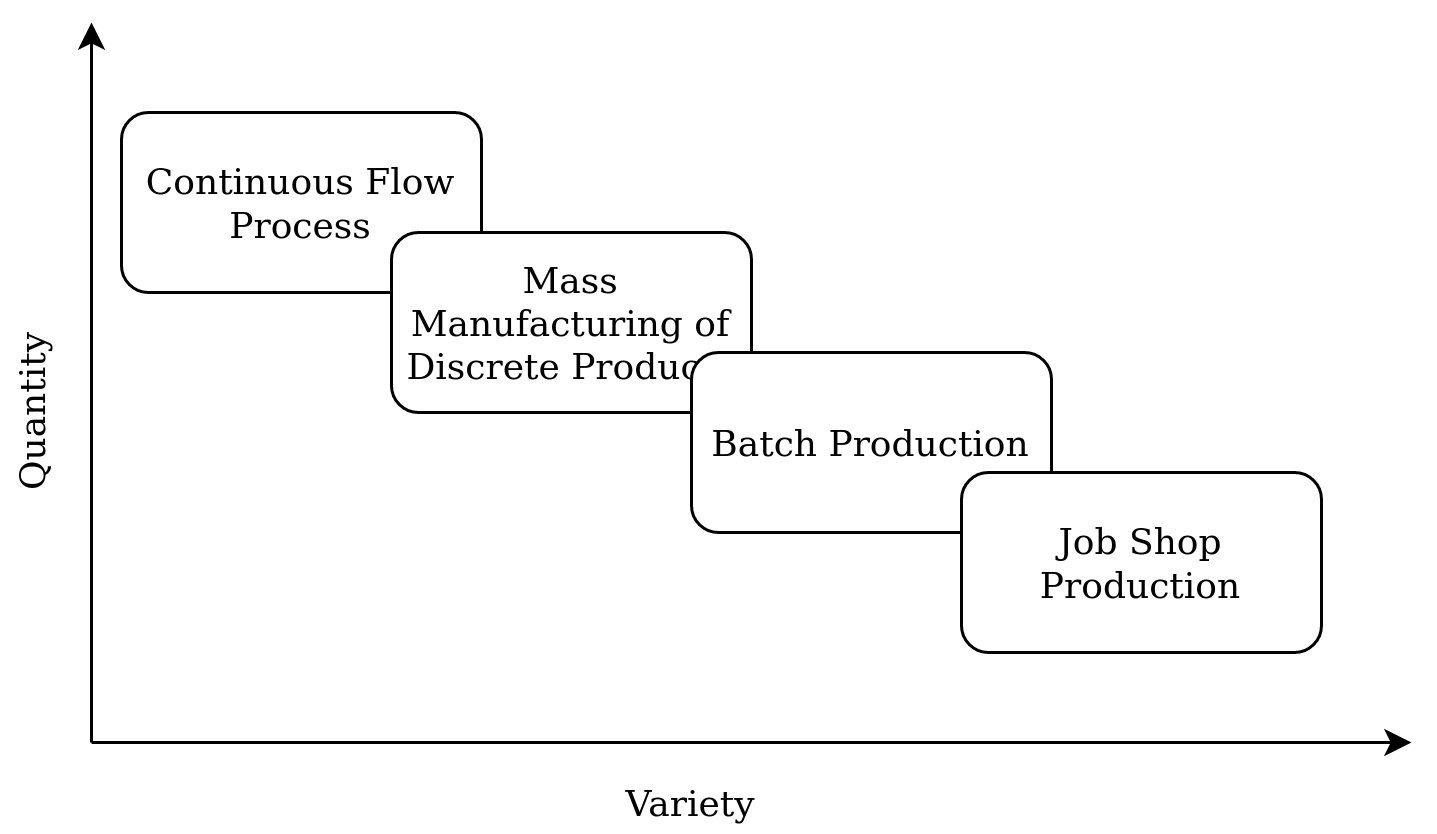
Согласно введенным понятиям масштаба и цели можно предположить основные типы производств (рис. 1.5).
|
Рис. 1.5. Классификация производственных систем. |
-
Непрерывный процесс (continuous flow process) - производимое изделие "непрерывно" (не является единичным объектом). Объемы велики, различие в продукции относительно не велико (нефтепереработка, цементное производство, сталелитейная промышленность и т.д.).
-
Массовое производство единичной продукции (mass manufacturing of discrete production) - большие объемы единичных объектов, вариации продуктов весьма ограничены (приборостроение, автомобилестроение, выпуск сковородок и т.д.).
-
Серийное производство (ассортиментное, batch production) - производит серию единичного или непрерывного продукта, различия между продукцией больше. Один и тот же комплект оборудования изготавливает много видов продукции (но для каждой серии/партии устанавливается отдельный набор параметров - "рецепт" партии) (фармацевтика, литейное производство, формовка пластмасс, печать и т.д.). Сюда же и относится производство минеральных удобрений (хотя для некоторых технологических схем и предприятий можно предположить и массовое производство единичной продукции).
-
Цеховое производство (мастерские, job shop) - небольшое количество единичной продукции, обычно на заказ, возможны любые изменения в изделии (прототипирование, 3Д печать, различные мастерские и т.д.).
1.3.2 Типы автоматизированных систем
Автоматические системы можно разделить на категории в зависимости от гибкости и степени интеграции в производственный процесс.
-
Фиксированная автоматизация (fixed automation) - фиксированный набор рабочих параметров для механизированного оборудования. Используется для выполнения фиксированных и повторяющихся действий с целью производства большего количества одинаковых деталей (используется в непрерывных и массовых типах производств, например: конвейеры покрасочного цеха, дистилляция, линии подачи пробы и т.д.).
-
Программируемая автоматизация (programmable automation) - изменение последовательности работы и конфигурации станков с помощью электронных средств управления. В данной схеме может потребоваться нетривиальное программирование (например, для различных PLC, обычно используется в серийном производстве где разнообразие рабочего оборудования низкое, а вариация продукции высокая; например бумажные или сталелитейные заводы и т.д.).
-
Гибкая автоматизация (flexible automation) - используется в гибких производственных системах (flexible manufacturing system, FMS), которые постоянно управляются компьютером (операторы вводят команды высокого уровня, при этом изменения нижнего уровня выполняются автоматически; обычно используется в серийном и цеховом производстве где много сортов продукции, а объемы работ варьируются от средних до низких). В таких системах обычно используются многоцелевые компьютеры с числовым программным управлением (ЧПУ, CNC), автомобили с автоматическим наведением (роботизированные системы, AGV) и др.
-
Интегрированная автоматизация (integrated automation) - полная автоматизация производства при которой все процессы выполняются и координируются компьютером (Computer Integrated Manufacturing - CIM). Другими словами, это полная интеграция технологических и управленческих операций с использованием ИТ. Часто в нее может входить и система бизнес управления. Пока что, успешные примеры таких систем крайне малы и сложно оценить, в каком виде производства они наиболее применимы.
Обратите внимание, что масштаб и сложность автоматизированных систем растет от фиксированной до интегрированной автоматизации. Но необходимо помнить, что тип автоматизации выбирается под каждое конкретное производство и задачи, а инвестиции в нее должны быть оправданы экономически.
Например, фиксированная автоматизация целесообразна, когда:
- Различия в типе продукции малы (размер, форма, количество деталей, материал).
- Существует прогнозируемый и стабильный спрос на продукт в течение 2-5 лет (и производственные мощности также стабильны).
- Объем производства за единицу времени высок.
- Требуется оптимальная производительность из-за конкуренции.
Гибкая автоматизация, с другой стороны, используется в следующих ситуациях:
- Существуют значительные различия в типах продукции (для одной производственной системы).
- Жизненный цикл модели продукта мал (частые усовершенствования и проектные модификации, которые изменяют производственные требования).
- Объемы производства умеренны, а спрос не так предсказуем.
Тем не менее в рамках протекающей на сегодняшний день промышленной революции Индустрия 4.0 все чаще склоняются к использованию серийного производства и модернизации непрерывных и массовых производств для данных целей. В связи с чем гибкая автоматизации становиться все более востребованной.
Задача. Как в ходе технического осмотра отрасли можно определить, какой тип автоматизации преобладает в ней? Для какой фабрики вы бы порекомендовали интегрированное компьютерное производство и почему? Какой вид автоматизации вы бы порекомендовали для производства:
- лампочек накаливания;
- одежда;
- текстиль;
- минеральные удобрения;
- печать;
- фармацевтические препараты;
- игрушки.
1.4 Упражнения
-
Опишите роль автоматизации с точки зрения общей рентабельности производственной системы.
-
Как промышленная автоматизация помогает экономить и каких типов эта экономия?
-
Введите в интернете запрос "история автоматизации" и прочитайте понравившиеся ссылки.
-
Изучите стандарт ISO 9001 "Quality management systems". Какие основные критерии системы менеджмента качества мы смогли найти в данной нормативной документации?
-
Какие есть альтернативные определения промышленности, автоматизации и контроля?
2. Архитектура систем промышленной автоматизации (СПА)
2.1 Введение и цели
В настоящем разделе мы рассмотрим общую структуру системы автоматизации в промышленности. Хотелось бы, что бы по окончанию раздела вы могли:
- привести элементы систем промышленной автоматизации и их иерархию (уровни организации);
- описать функциональную связь уровней организации (и назвать соответствующие технологии);
- привести реальные промышленные примеры для каждого из уровней;
- смогли описать поток информации между данными уровнями.
2.2 Архитектура системы промышленной автоматизации
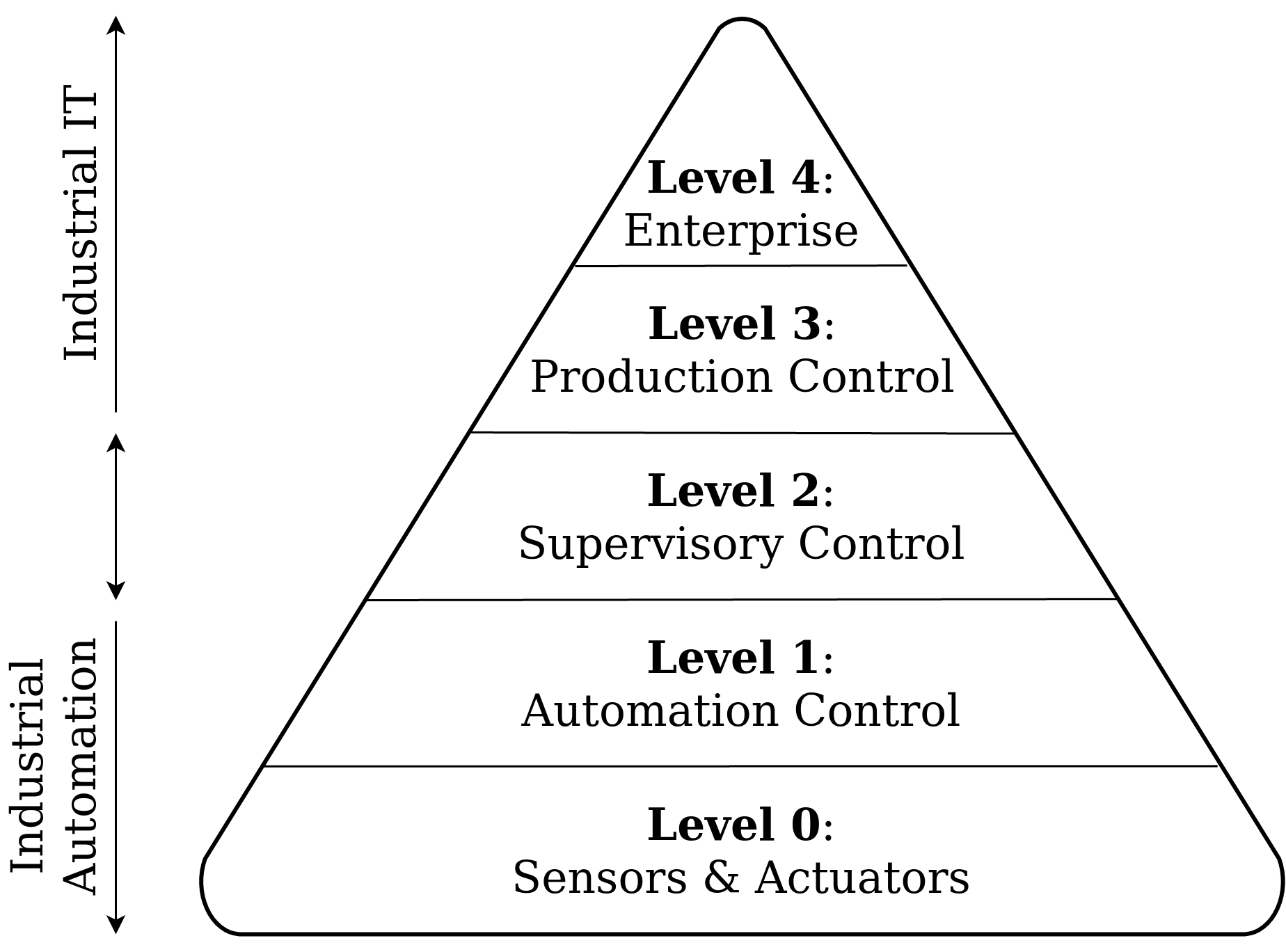
Перейдем к рассмотрению общей структуры всего промышленного комплекса, чтобы определить в нем свое место (рис. 2.1). Для простоты - представьте, что это один завод (например, АО "Рога и копыта").
|
Рис. 2.1. Архитектура промышленного комплекса. Обратите внимание на обозначение уровней. |
Начнем анализ с верхнего уровня - это наиболее соответствует человеческому восприятию всего процесса (с общего абстрактного уровня управления до конкретного алгоритмического). На 4 уровне (верхний) находится менеджмент верхнего уровня, т.е. управление всем предприятием (Enterprise). Данное понятие включает в себя определение экономических, научных, потребительских и прочих высокоуровневых направлений развития производства в целом. Думаю, это точно не то, что мы будем автоматизировать (пока что).
Далее следует контроль выпускаемой продукции (3 уровень, Production Control), где осуществляется проверка на соответствие ГОСТ и ТУ. Тоже выполняется пока людьми. Однако здесь отдаются уже более конкретные управляющие команды.
На 2 уровне расположился контроль принятия решений (Supervisory Control). Можно сказать что это переходный этап между понятным людям и понятным машинам командам и параметрам. Эту функцию берут на себя операторы производства вместе с автоматическими системами управления процессами (комната с большими мониторами на заводе). А то, что отображается на мониторах компьютеров и позволяет операторам понимать, что происходит в процессе производства называют АСУТП (Автоматизированная система управления технологическим процессом или supervisory control and data acquisition, SCADA). Очень часто этот уровень обозначают просто как АСУТП, хотя это уровень не ограничен только АСУТП и включает в себя еще и функции операторов по управлению процессом.
Уровень 1 (Automation Control) занимают системы автоматического контроля. Если говорить точнее, то системы поддержания заданных параметров качества (которые задаются АСУТП и операторами для конкретных точек процесса). На данном уровне часто используются компьютеры (PC) или логические контроллеры (PLC). Самая что ни на есть автоматизация! Те функции, которые не могут выполняться автоматически, берут на себя аппаратчики производства (цеховые рабочие).
На последнем, 0 уровне (Sensors & Actuacors) расположены сенсоры и актуаторы - устройства "получения" и "передачи" физической информации о процессе, которую они предоставляют на более высокие уровни управления.
Взаимодействие между уровнями обеспечивается единой информационно-коммуникационной системой предприятия (система управления производственными процессами или Manufacturing execution system, MES). Например, для АО "Апатит" такой системой является PI System.
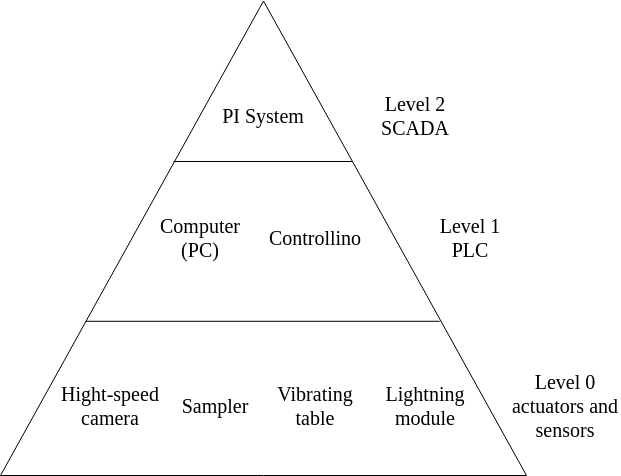
От себя добавлю, что на сегодняшний день все большее распространение получают роботизированные системы контроля установленные прямо в производственном процессе (т.е. это система 0 - 2 уровня). Данные системы могут как взаимодействовать с АСУТП напрямую, так и работать автономно (например, как агрегаторы данных). На примере подобных систем можно хорошо проиллюстрировать связь описанных уровней с точки зрения промышленной автоматизации (рис. 2.2).
|
Рис. 2.2. Архитектура роботизированной системы контроля гранулометрического состава на предприятии, производящим минеральные удобрения. |
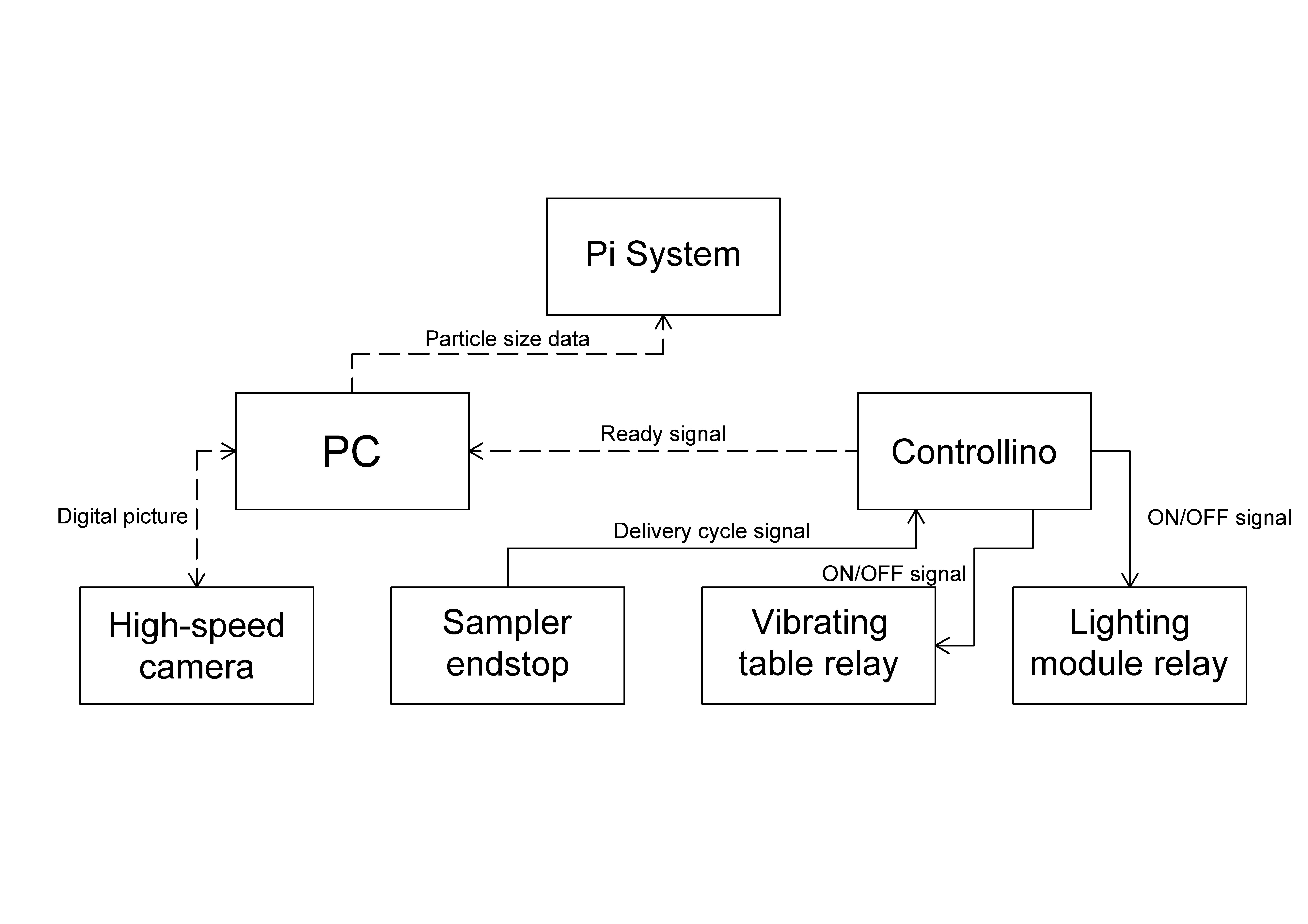
Данная система была разработана мною с коллегами и служит для контроля гранулометрического состава производимых минеральных удобрений. Более подробная взаимосвязь компонентов и принцип работы приведены на рис. 2.3.
|
Рис. 2.3. Потоки передачи сигналов и данных для роботизированной системы контроля гранулометрического состава. Пунктирные линии представляют цифровые сигналы, остальные - аналоговые сигналы. |
Отметим, что время принятия решения и количество информации, которые заложенны в одном конкретном решении увеличиваются от 0 до 4 уровня. Другими словами "чем выше уровень - тем более общие управляющие термины используются" (что означает большее количество времени и опыта/баз данных для декомпозиции этих запросов).
Пример. Менеджеры говорят "сделай качественно для рынка"; техотдел передает "сделай качественно согласно ГОСТ 2х2"; управление контролем качества проводят анализы и передают параметры операторам; те в свою очередь вводят в АСУТП параметры в виде "подкрутить ручки 1-2-3 в позиции 3-2-1"; аппаратчик или система автоматического контроля "подкручивает ручки и удерживает заданные параметры" в согласии с прочими параметрами системы; сенсоры и актуаторы "крутятся, меряют и урчат" передавая новую информацию на верх. Как-то так.
На первый взгляд - наше место находиться на 0 и 1 уровнях данной системы. Однако, часто и 2 уровень попадает в поле зрения автоматизации и неразрушающего контроля (см. заметку про роботизированные системы, рис. 2.2). Тем не менее, в рамках настоящего пособия будут рассматриваться измерительные устройства 0 уровня (сенсоры), поскольку именно они являются незыблемым фундаментом автоматического неразрушающего контроля. Но все же далее мы приведем краткое описание каждого из уровней автоматизации предприятия для формирования общей картины (начиная с самого низкого уровня).
2.3 Уровень 0. Сенсоры и актуаторы
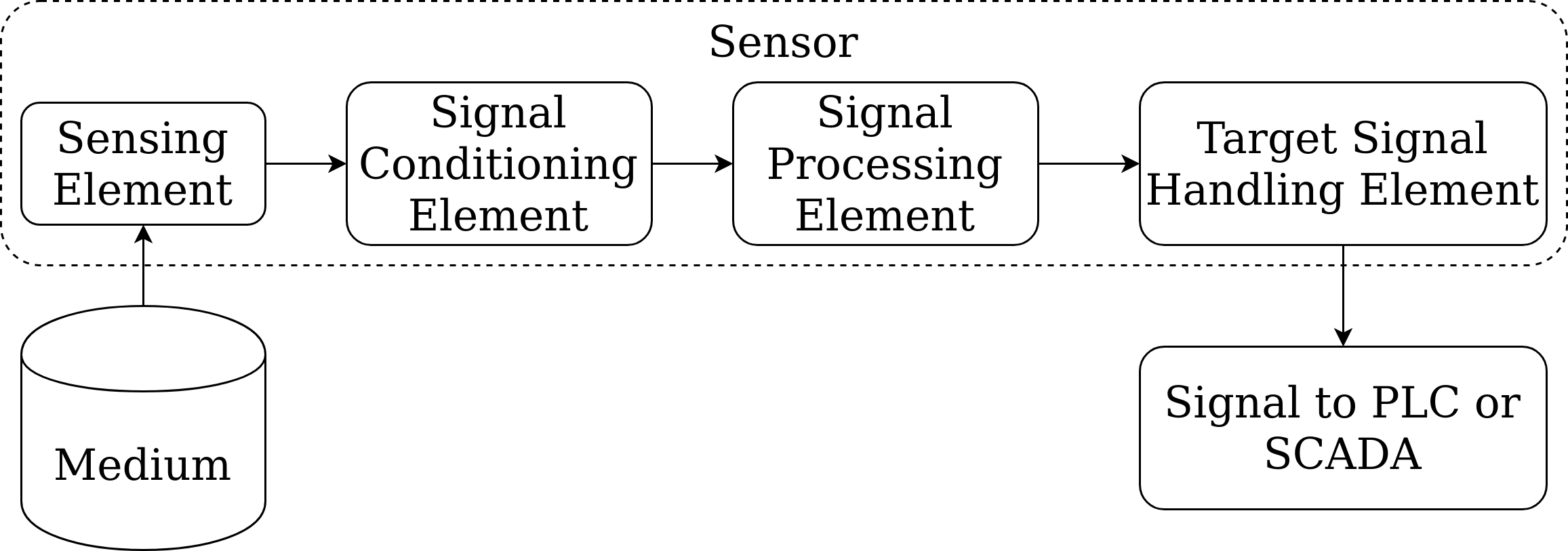
Первой системой контроля (которая непосредственно отвечает за автоматизацию) будет система сенсоров (уровень 0). Она должна давать нам точную и чувствительную информацию (сигнал), связанную с физической величиной (например, температурой) (рис. 2.4). Получение такой информации возможно за счет специальных устройств - сенсоров (датчики, sensors/gages). Получение данной информации необходимо, чтобы на уровне 2 были произведены нужные вычисления и рассчитан ответ управляющей системы (или среагировал оператор). На основании данного ответа для актуатора или аппаратчика поступит новый ввод данных (например, для удержания процесса в технологических рамках).
Примечание. Все это "циклическое взаимодействие между уровнями 0-1-2 происходит для обеспечения общего качества по ГОСТ или ТУ в рамках уровня 4 в соответствии с требованиями рынка, которые передаются через уровень 5.
При этом, информация (сигнал) от/до уровня 0 передается в виде электрической или пневматической формах информации и дальше преобразуется либо в электрический сигранл по одному из протоколов связи с компьютером или ПЛК (например Modbus, Profibus, RS485, RS232 Ethernet и т.п.), либо во входной параметр технологического процесса (тепло, сила потока). Таким образом передать сигнал от процесса - задача сенсоров, принять управляющий сигнал и воздействовать на процесс - задача других устройств, актуаторов.
|
Рис. 2.4. Система сенсорного контроля (уровень 0). |
При этом, нас интересует информация о состоянии физической среды (medium), которая относится к конкретному технологическому физическому процессу. Если более конкретно, то нас интересует измерение некоторой физической переменной, функционально связанной с этим явлением, лежащим в основе технологического процесса.
Пример. Информация о температуре теплоносителя в топке с точки зрения изменения данного параметра при измерении расхода жидкости.
Именно для этого нам нужен сенсор - черный ящик, находящийся в непосредственном контакте со средой, который обеспечивает контроль состояния этой среды (как правило, не разрушающий).
Сам же сенсор состоит из следующих основных элементов.
- Чувствительный элемент (sensing element) - элемент, чьи физические/химические/биологические свойства изменяются в зависимости от физической среды (прямой или непрямой контакт).
Пример. Типичным примером сенсора является изменение удельного сопротивления из-за нагрева провода термистра (терморезистор, resistance Temperature Detector, RTD).
- После, чувствительный элемент соединяется с модулем формирования сигнала (signal-conditioning element), который изменяет тип сигнала от чувствительного элемента (обычно преобразует его в электрическую форму: напряжение, ток, емкость или индуктивность). Данное преобразование зависит в основном от типа сенсора (именно по этому чувствительный элемент является уникальным для того или иного типа датчика). Как правило, для подобных модулей используются аналоговые электронные схемы, которые в конечном итоге вырабатывают электрические сигналы в виде напряжения или тока в определенных диапазонах. Кроме того, подобный модуль может также использоваться и для специальных функций, не связанных с преобразованием сигнала. Например, для нивелирования внешних условий измерений для термопар ("внешняя привязка", ambient referencing).
Пример. Для температурного резистора (RTD) изменение сопротивления может быть легко преобразовано в напряжение путем включения RTD в измерительный мост (мост Уитстона, Wheatstone's bridge). Таким образом данный мост служит модулем формирования сигнала.
-
Следующим модулем стоит элемент обработки сигнала (signal processing element), который используется для последующей работы с электрическим сигналом с целью фильтрации (устранение шумов), диагностики (оценка состояния датчика), линеаризации (получение выхода, линейно связанного с физическими параметрами среды) и т.д.. Как можно догадаться из количества функций этот элемент обычно имеет более общее назначение чем предыдущие.
-
Последний модуль - элемент целевой обработки сигнала (target signal-handling element). Обычно он тоже универсален и может выполнять различные функции: отображение данных/сигналов, запись, хранение, обратная связь с системой управления процессом и т.д.. Примерами могут служить регистратор температурных диаграмм, регистратор лент КИПиА, цифровой дисплей или аналого-цифровой преобразователь (АЦП, ADC) с последующим подключением к компьютеру системы управления процессом.
Примечание. Современные сенсоры обычно обладают дополнительным модулем/способностью цифровой передачи данных. Для этого используются серийные, параллельные или сетевые протоколы (например USB и упомянутые в разделе 2.2 RS485, RS232 Ethernet и т.п.). Такие сенсоры называют "умными" (smart) и они содержат соответствующие дополнительные цифровые электронные системы преобразования сигнала под протокол связи.
Таким образом, сенсор переводит входящие физические сигналы (температура, давление, скорость и т.д.) в выходящие электрические сигналы, которые в свою очередь являются входящими сигналами для следующего уровня автоматизации: управление ПЛК, анализа операторами, принятие решений и, т.д.
Примечание. Помимо электрических сигналов от сенсоров существуют еще и пневматические, но их рассмотрение выходит за рамки нашего курса.
Таким образом мы кратко рассмотрели как осуществляется передача информации от процесса до управления. Однако есть и обратное направление и чтобы осуществить управляющее воздействие на сам процесс, нам нужны исполнительные устройства или актуаторы (мы все еще на уровне 0). Данные устройства характеризуют воздействие на процесс, в зависимости от полученного сенсорного сигнала в соответствии с заданным управлением (задается с более высоких уровней, например 1 или 2).
Исполнительные устройства или актуаторы (Actuator) - это преобразователь электрического сигнала в физическое воздействие который необходим для обеспечения изменений в физических процессах (например, регуляция скорости потока, массы продукта, давления и т.д.).
Пример. Актуатор может повернуть заслонку или открыть сопло горелки, что приведет к изменению состояния физической среды в производственном процессе.
Таким образом, сенсоры и актуаторы являются двумя сторонами одной медали, но работают с преобразованиями различной силы: актуаторы являются исполнительными устройствами и потребляют много энергии (формируют воздействие определенной силы в зависимости от сигнала), в то время, как сенсоры формируют электрический сигнал из физического воздействия и не требуют высокой мощности. Следовательно, актуаторная система хоть и является обратной сенсорной по своей сути, но обычно входящие в ее состав устройства более энергоемкие и в большинстве случаев производят какое-либо движение (которое потом преобразуется в другие формы физического воздействия). Тем не менее логика работы актуаторов с сигналом примерно соответствует сенсорной логике (рис. 2.5).
Примечание. Аналогично сенсорам, существуют и "умные актуаторы".
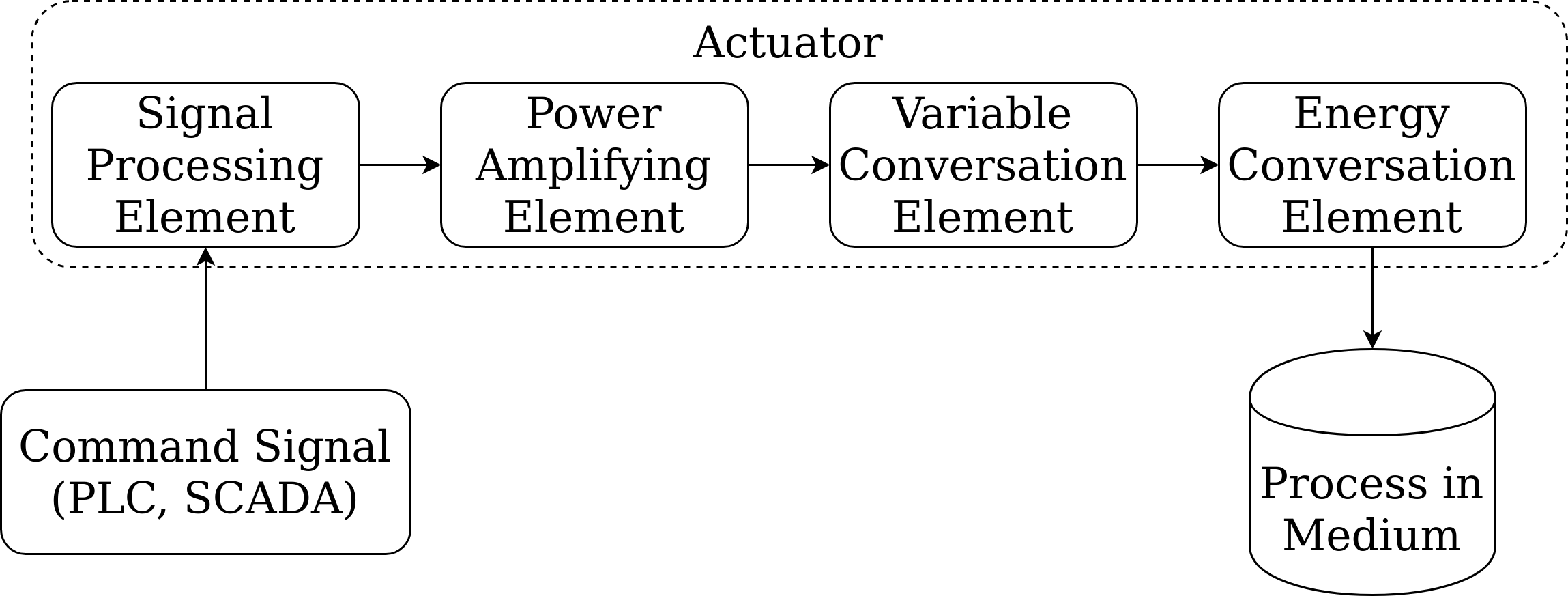
a) 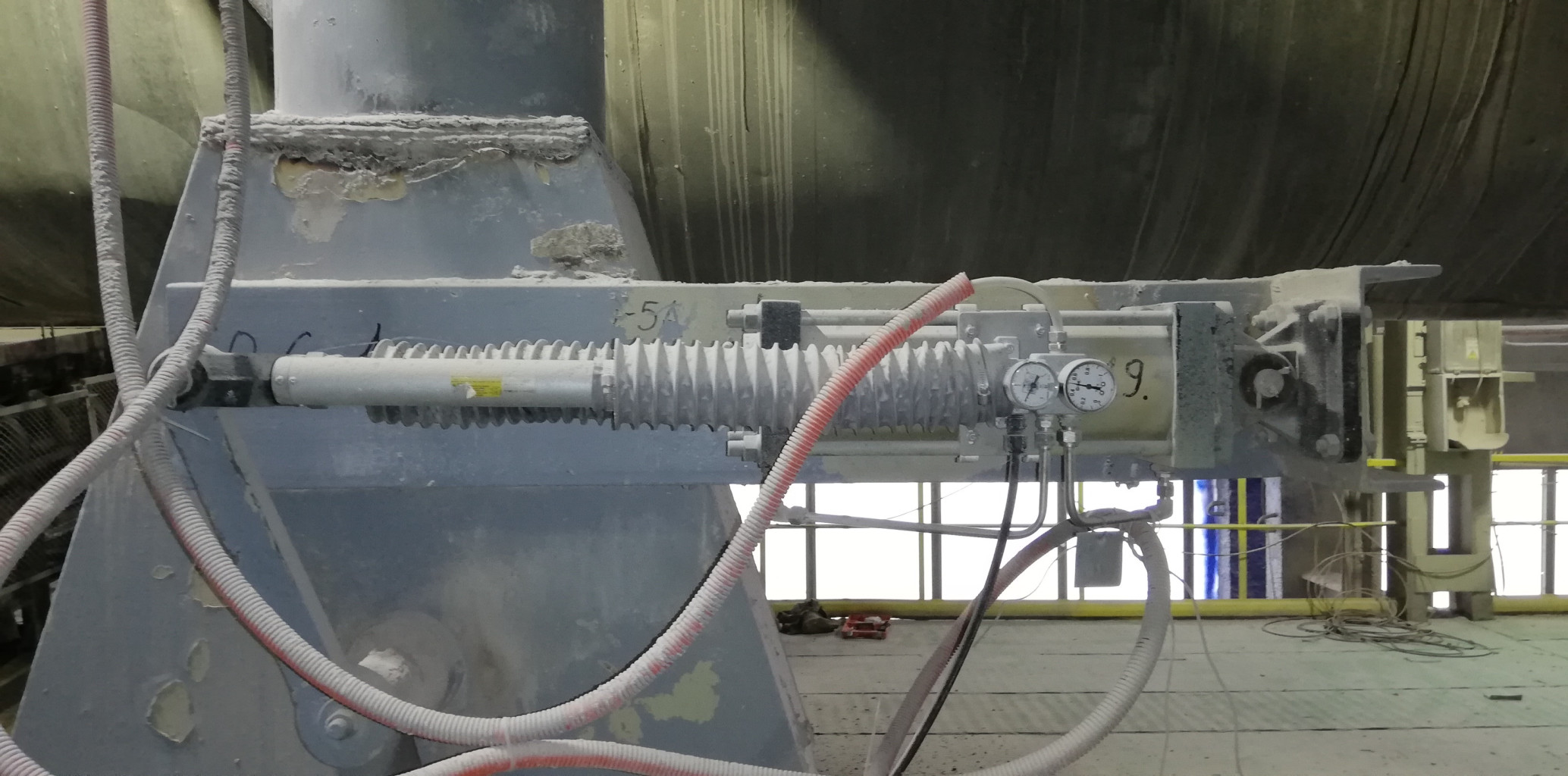
b) |
Рис. 2.5. Функциональная конфигурация типичной актуаторной системы (a) и пример ее промышленной реализации (b). |
Разберем типичные блоки исполнительной системы (актуатора):
- Элемент обработки сигнала (signal processing element) принимает команду от системы контроля в электрической форме (как правило, слабой мощности). Данная команда может обрабатываться несколькими путями. Например, может производиться усиление или фильтрация (для удаления входящего сигнала определенной частоты, которая может вызвать резонанс). Многие актуаторы исполняются в виде замкнутых блоков со встроенным управлением (т.е. 1ый уровень автоматизации) с обратной связью (в блок входит и получение сигнала от встроенного сенсора) для обеспечения своевременности и точности срабатывания. Поэтому электронный блок обработки сигналов часто содержит систему управления для самого привода (например ПЛК).
- Элемент усиления мощности (power amplifying element) иногда содержит линейные каскады усиления мощности (linear power amplification stages). В других случаях он может состоять из силовых электронных схем, например, для электрических приводов (motor driven actuators). Требуется для получения необходимой актуатору мощности для осуществения воздействия на среду.
- Элемент преобразования переменной (variable conversion element) выполняет функцию изменения характера сигнала, генерируемого электронным элементом усиления мощности (с электрической на не электрическую форму, как правило, в движение). Примерами являются электрогидравлические сервоклапаны (electrohydraulic servo valve), шаговые/серво двигатели (stepper/servo motors), преобразователи тока в пневматическое давление (Current to Pneumatic Pressure converters) и т.д.
- Элемент преобразования энергии (energy conversation element), дополнительный элемент который, как правило, включает в себя элементы не электрического преобразования мощности (non-electrical power conversion element) и используется при необходимости дальнейшего увеличения мощности (как правило, с помощью гидравлических или пневматических механизмов). Кроме того в его составе могут использоваться элементы не электрического преобразования переменной (non-electrical variable conversion elements) для преобразования управляемой переменной в желаемую форму, часто в несколько этапов. Типичные примеры включают преобразование скорости движения в скорость потока в проточных клапанах, преобразователи поворотного движения в линейное с использованием специальных механизмов (например, червячная передача), преобразование скорости потока в тепло с использованием пара или горячих жидкостей и т.д.
В заключении, в актуаторах могут использоваться различные вспомогательные элементы (оборудование) для смазки/охлаждения/фильтрации, дополнительные резервуары, первичные приводы, датчики обратной связи, компоненты для отображения, дистанционное управление, а также защитные механизмы и т.д. поскольку уровень мощности (электрической) актуаторов значительно выше, чем сенсоров.
Подводя итог настоящему разделу, системы 0 уровня можно отобразить в общем виде на примере управления задвижкой крана, который регулирует поток в некоторой среде (рис. 2.6).
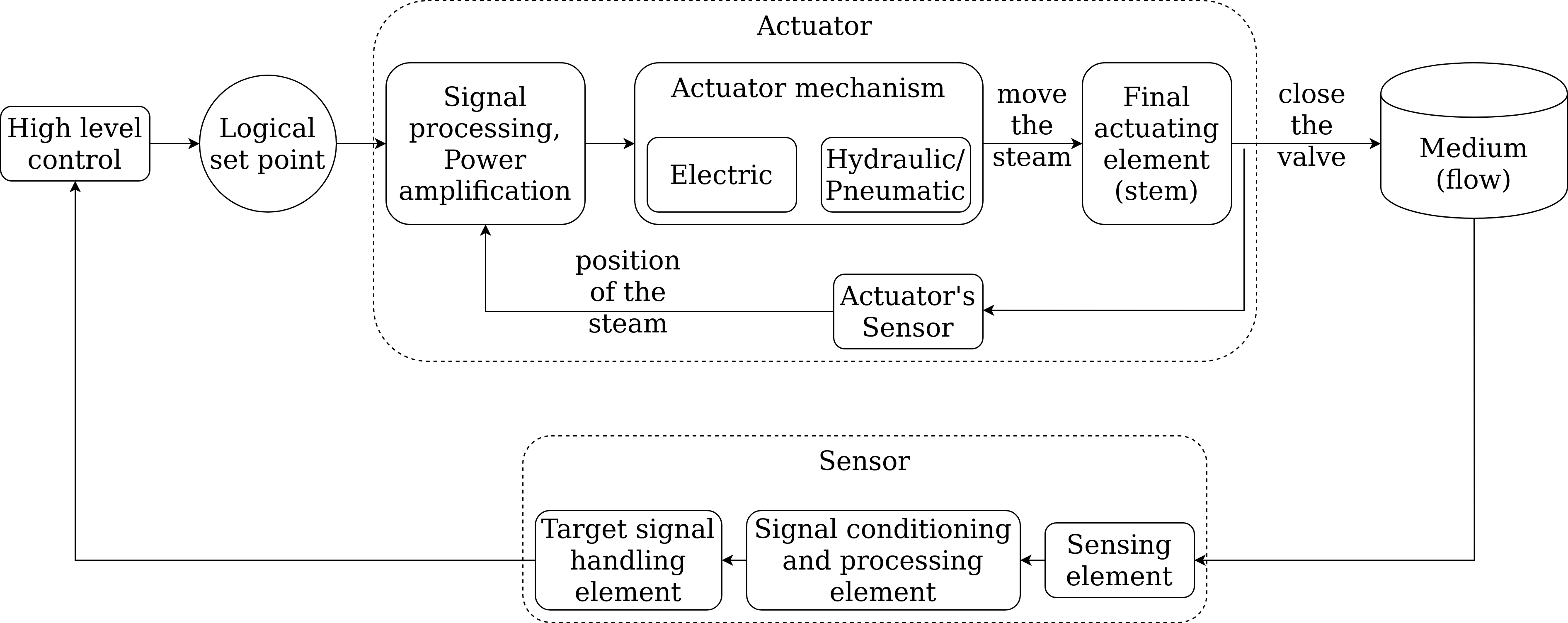
|
Рис. 2.6. Система контроля 0 уровня. |
2.4 Уровень 1. Система автоматического управления (контроля)
Как вы могли видеть из рис. 2.6 - существует некоторый цикл, связывающий сенсор и актуатор. За счет этого цикла и взаимодействия данных устройств должно происходит некое управление средой. Именно этот цикл и понятие "управления" дает нам возможность подняться в автоматизации на уровень выше и рассмотреть систему автоматического управления (уровень 1). Как правило, под промышленными системами управления 1ого уровня подразумевается использование небольших управляющих контуров на базе программируемого логического контроллера (ПЛК, PL controller, PLC). Этот новый элемент (обычно электронный или пневматический) принимает на вход сигналы от операторов или АСУТП (устанавливает заданное значение), а так же обратную связь от сенсора (промышленного процесса) и на выходе выдает (или рассчитывает) сигналы для актуатора, чтобы реальное значение было как можно ближе к заданному (рис. 2.7).
Примечание. Широко известный Arduino-контроллер в обычном исполнении не является ПЛК, поскольку не предназначен для автономного использования в промышленных условиях и не обладает промышленными интерфейсами работы с сенсорами - это просто микроконтроллер. Но на сегодняшний день есть варианты Arduino-контроллеров, которые являются полноценными ПЛК, например Controllino.
|
Рис. 2.7. Цикл автоматической системы контроля (уровень 1). |
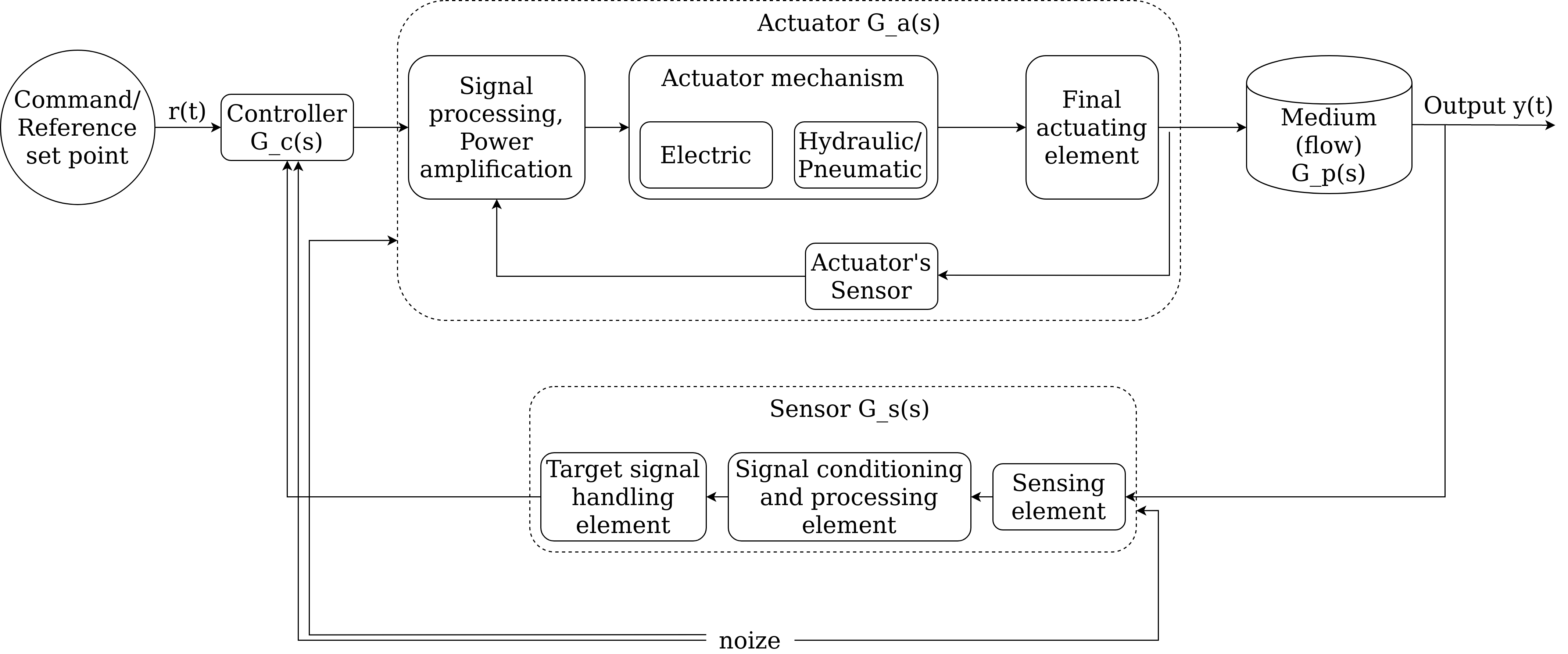
Данный цикл также часто называют автоматическим управлением (Automatic Control), управлением процессом (Process Control), управлением с обратной связью (Feedback Control) и т.д. В данном случае целью контроллера является обеспечение таких сигналов на актуатор, чтобы вход от показаний сенсора (параметр технологического процесса y(t)) следовал за входом от команды управления (команда операторов r(t)) настолько близко, насколько это возможно (и по значению, и по времени). Как можно видеть на рис. 2.7 показана структура общего контура управления с его составными элементами, а именно: контроллером, приводом (актуатор), сенсором и самим процессом (среда, в которой происходит процесс). Кроме того, на рисунке отмечены сигналы, существующие в различных точках системы:
- вход от команды управления (заданное значение или эталонный сигнал, set point or reference signal);
- вход от сенсора (данные среды);
- внешние помехи (шум, noise).
Несмотря на кажущуюся простоту работы ПЛК достичь точного соответствия заданному значению практически невозможно за счет наличия помех (изменение нагрузок, наводящие токи, шум датчика) и ограниченного времени отклика за счет внешних факторов производства (нестабильность, неопределенность и изменчивость в динамике процесса).
Примечание. Еще раз обратите внимание на новый элемент - контроллер. По сути это и есть промышленная система автоматического управления 1 уровня (по своей сути это связной - он обеспечивает прямую и обратную связь входных и выходных параметров между уровнями 0 и 1, следит за их соответствием друг другу).
Большинство промышленных "управляющих" сигналов для контроллера представляют собой "кусочно-неизменяемые" или дискретные сигналы (т.е. дискретные константы), указывающие на желаемое значение переменной/параметров процесса (например, желаемая температура, давление, расход, уровень и т.п.). Они задаются через определенные интервалы времени в виде конкретных величин и должны улучшать протекающие процессы и качество изделия. Однако сам процесс производства является непрерывным (continuous process). Из-за этого он склонен постоянно откланяется на разную величину от заданного параметра, что в теории приводит к частому и большому изменению управляющего сигнала и к ухудшению качества продукции (как и к выходу из строя актуаторов и контроллеров). Чтобы избежать этой проблемы применяют разные схемы "приблизительного" управления типа "П", "ПИ", "ПИД" и т.п. регуляции.
Примечание. Описанная проблема очень актуальна для различных автопилотов, особенно для автомобильного транспорта.
В целом, рассмотрение схем регуляции контроллеров выходит за рамки настоящего курса. Поэтому ограничусь лишь небольшими основами. Во-первых, мы рассматриваем контроллер с точки зрения управления процессом (т.е. как черный ящик), а потому в нашем случае он будет синонимом, т.е. "мгновенным" регулятором (хотя с аппаратной точки зрения это разные устройства). Тогда с точки зрения регуляции процесса существует несколько контроллеров:
- П (P) - пропорциональный
- И (I) - интегральный
- Д(D) - дифференциальный
- ПИ (PI) - пропорциональный и интегральный
- ПД (PD) - пропорциональный и дифференциальный
- ПИД (PID) - пропорциональный, интегральный и дифференциальный
Примечание. Сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) и т.п. регуляторы означают устройства регулирования (черный ящик) для актуатора, которые генерируют на своем выходе обратную связь в виде результата некой передаточной функции для положения актуатора (т.е. на выходе возвращается по сути разность между установленным значением и значением сенсора, приближенная той или иной функцией). Тп передаточной функции как раз и обозначается как П, ПИ и т.д..
Пример. Рассмотрим регулирование комнатной температуры (поддержании ее значения в
Xградусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величинуe(повышении температуры до уровняX+e) к стандартному входному сигналуUнагревателя будет добавлен отрицательный сигнал регулятораu. Результирующим сигналом на входе нагревателя будет, таким образом,U-u, что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру (отрицательная обратная связь от регулятора). Именно так (с отрицательной обратной связью) работает большинство регуляторов в промышленной автоматизации.Очень часто
eназывают "ошибкой" или "отклонением",Х- "заданным уровнем" или "заданным значением", причемХ, в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования.
Далее мы немного более подробно рассмотрим работу ПИД (PID) регулятор как наиболее универсального представителя класса (беря за основу приведенный выше пример с температурой в комнате). Любой другой регулятор может быть получен путем обнуления коэффициента передачи в соответствующем слагаемом передаточной функции.
Итак, передаточная функция ПИД регулятора описывается уравнением:
Часто используются следующие обозначения:
- \(K_p\) - пропорциональный коэффициент усиления
- \(P_b = \frac{1}{K_p}\) - относительный диапазон регулирования
- \(K_i\) - интегральный коэффициент усиления
- \(T_i = \frac{1}{K_i}\) - постоянная интегрирования (размерность - время)
- \(K_d\) - дифференциальный коэффициент усиления
- \(T_d = K_d\) - постоянная дифференицирования (размерность - время)
Рассмотрим, каждое из слагаемого ПИД регулятора по порядку:
-
Пропорциональное регулирование (П или P регуляторы) - величина поправки в регулирующее воздействие, которая линейно пропорциональна величине отклонения. Логично, чем больше отклонение температуры в комнате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения.
-
Интегральное регулирование - величина поправки в регулирующее воздействие, которая зависит от накопленного действия отклонения регулируемой величины. Например, пропорциональное регулирование попросту не позволяет прогреть комнату при открытом окне и уйти от низких температур в комнате (т.е. помещение будет проветриваться с той же скоростью, что и прогреваться). Но при интегральном регулировании, если накопленное действие пониженной температуры растет (интеграл), то это слагаемое даст дополнительное приращение мощности нагревателя (по сравнению с пропорциональным) и позволит прогреть комнату (считаем, что наш нагреватель обладает бесконечной мощностью).
-
Дифференциальное регулирование - величина поправки зависит от скорости изменения регулируемого параметра. Если температура на улице резко упала, то лучше поскорее прогреть комнату и стены (чтобы не дать им остыть). Однако следует помнить, что данный вид регулирования может легко вызвать резкие перепады и резонансы в управлении.
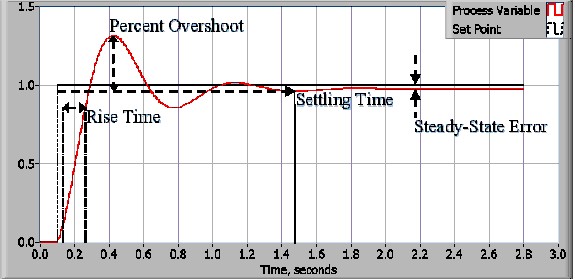
В случае кусочно-непрерывного управления (дискретные константы), мы получаем сигнал с сенсора на контроллере, рассчитываем управляющее воздействие, применяем его к актуатору, получаем новый сигнал с сенсора и т.д. В общем случае отклик системы измеряется волновыми характеристиками (рис. 2.8).
|
Рис. 2.8. Характеристики отклика типичного ПИД регулятора, работающего по замкнутой схеме управления. |
Для регулятора существуют следующие характеристики и определения:
- Время подъема (Rise Time) - время, при котором система проходит от 10 до 90 % заданного уровня (steady-state value).
- Процент перевыполнения (Percent Overshoot) - величина превышения характеристики процесса (в процентах от заданного значения).
- Время установки (Settling time) - это время, необходимое для того, чтобы переменная процесса достигла определенного процента конечного значения (обычно 5%).
- Ошибка в установившемся состоянии (Steady-State Error) - это конечная разница между переменной процесса и заданным значением.
- Сопротивление возмущающим воздействиям системы (disturbance rejection of the control system) - количественная мера того, насколько хорошо система управления способна преодолевать последствия возмущений.
- Нелинейная система (nonlinear system) - это система, в которой параметры управления зависят от параметров системы (например, камера, частично заполненная жидкостью, будет показывать гораздо более быструю реакцию на мощность нагревателя, когда он почти пуст, чем когда он почти заполнен жидкостью).
- Надежность системы управления (robustness of the control system) - мера того, насколько хорошо система управления выдержит возмущения и нелинейности.
- Мертвое время (временем простоя, deadtime) - это задержка между моментом изменения переменной процесса и моментом, когда это изменение детектируются.
Пример. Если датчик температуры расположен на большом расстоянии от входного клапана холодной воды, он не будет выдавать изменение температуры сразу же после изменения положения клапана - вначале до него должны "дотечь" изменения. Кроме того, мертвое время также может быть вызвано приводом, который медленно реагирует на команду управления (клапан, который медленно открывается или закрывается).
- Время цикла (loop cycle time) - интервал времени, между установкой новой дискретной константы и вызовом алгоритма управления (системы, которые быстро меняются или имеют сложное поведение, требуют более высокой скорости цикла управления).
Примечание. Точное определение приведенных выше терминов может варьироваться в различных промышленных и научных кругах.
Примечание. Одно устройство ПЛК может работать как регулятор в нескольких управляющих циклах (single-loop/multi-loop controller). Сегодня многие контроллеры предлагают адаптивное управление и алгоритмы нечеткой логики для улучшения управления процессом. Среди прочих требуемых и распространенных характеристик: возможность взаимодействия с системой принятия решений (АСУТП), взаимодействие в одноранговых сетях (peer-to-peer network) (таких, как Fieldbus или DeviceNet), поддержка ручного управления в случае сбоя автоматики. При этом программное обеспечение также является важным фактором и используется для настройки, мониторинга, автонастройки и сигнализации. В то время как большинство современных сложных контроллеров и регуляторов являются электронными, существуют и пневматические варианты.
Еще раз отмечу, что многие современные контроллеры, которые широко применяются для последовательного управления в конвейерных линиях, робототехнике, управлении процессом и многих других автоматизированных системах являются программируемыми логическими контроллерами (ПЛК, Programmable Logic Controller, PLC). По сути, ПЛК - это специализированная промышленная микропроцессорная вычислительная система реального времени внутри которой установлен контроллер (мозг).
Примечание. Стандартный программируемый логический контроллер состоит из:
- процессорного блока (CPU), который интерпретирует входы, выполняет сохраненную программу управления и посылает выходные сигналы,
- блока питания, который преобразует переменное напряжение в постоянное (обычно 12 или 24 В),
- устройства памяти, хранящее данные (8 бит, 64 бита и т.д.),
- входных и выходных интерфейсов для приема/отправки данных от/к внешним устройствам (цифровые или аналоговые),
- интерфейса связи для приема и передачи данных от/к ПЛК.
Обычно, для настройки и прошивки ПЛК требуются специальные устройства для записи программного кода - программаторы, которое используется для разработки и последующей загрузки программы в память контроллера (иногда эту функцию выполняет компьютер).
Примечание. Некоторые современные ПЛК даже содержат операционную систему реального времени, например, OS-9 или VxWorks.
Задача. Вспомните/подумайте, является ли Arduino ПЛК?
2.5 Уровень 2. Контроль принятия решений
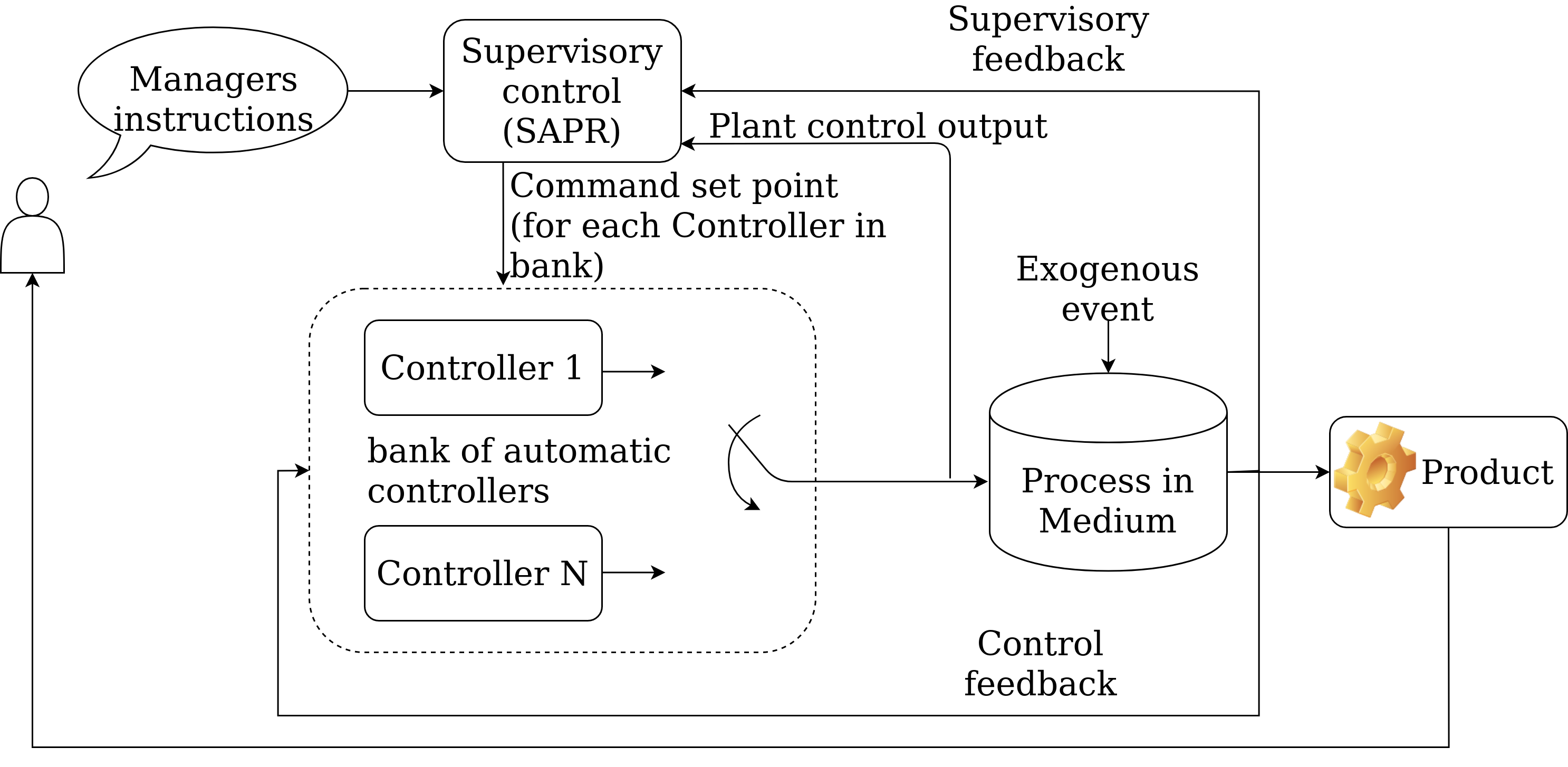
Остается последним из уровней, частично входящий в нашу область ответственности. Уровень 2 - контроль принятия решений (Supervisory Control, рис. 2.8). Данная ступень контроля на уровень выше "автоматических контроллеров" 1 уровня, которые контролируют лишь небольшую подсистему (и часто в замкнутом цикле).
|
Рис. 2.8. Общая система управления производством с точки зрения контроля принятия решений (уровень 2). |
Контроль принятия решений обычно выполняет следующие функции:
- Устанавливает "точки контроля" для важных переменных в технологических процессах (зависит от природы продукта, объема и типа производства) - это сильно влияет на управление процессом, энергией, качеством и эффективностью. Точка контроля - это определенное место в техническом процессе (среде), где производится контроль и управляющее воздействие. Можно сказать что туда ставится ПЛК.
- Обеспечивает мониторинг/диагностику производительности многих технологических процессов: проверяет сенсоры и актуаторы, параметры процессов в выбранных точках контроля, следит на наличие ошибок (результаты сохраняются) и т.д..
- Производит запуск/остановку/экстренные операции - специальные дискретные и непрерывные модели управления, созданные для ответа на команды оператора и диагностические события (такие, как обнаруженные ошибки или критические отклонения процессов).
- Контроль переконфигурации/настройка систем автоматизации 1ого уровня - структурная или параметрическая перестройка контуров управления. Выполняется либо в ответ на команды оператора, либо в ответ на диагностические события. Реконфигурация управления может потребоваться также для адаптации контуров управления к изменению обратной связи от сенсоров или потребляемой энергии (например, при сжигании газа в масле, расхода компонента и т.д.).
- Графический интерфейс - интерфейс оператора для ручного управления и корректирования.
Можно заметить, что данные системы зависимы от типа управляемого процесса (в противовес уровню 1, который обычно унифицирован). Как правило, в системах 2ого уровня присутствует смесь аппаратных и программных алгоритмов и такие системы стоят очень дорого.
Задание. Рассмотрите автоматическую систему контроля драйвера двигателя для ЧПУ (CNC Machine drivers) на рис. 2.9. Найдите, где данная система установила свои точки расчета (set points). Рассмотрите прочие функциональные особенности, согласно взаимодействию с уровнем 2.
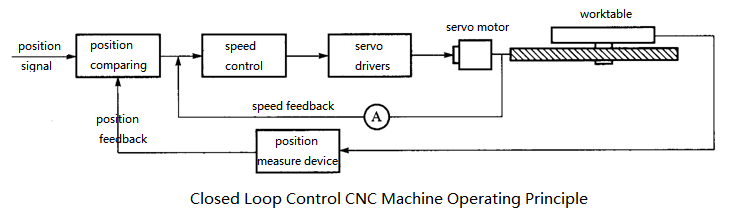
Рис. 2.9. Автоматическая система контроля драйвера двигателя ЧПУ (https://www.datancnc.com/index_projectxq_id_166_jpid_91.html). 2.6 Прочие уровни управления
Кратко рассмотрим функции 3его уровня (контроль производства).
- Планирование процесса: обработка доступности ресурсов для их оптимального использования и переработки (в зависимости от последовательности операций, которые необходимо выполнить с имеющимися партиями продукции).
- Управление техническим обслуживанием: процессы принятия решений, связанные с обнаружением и развертыванием операций технического обслуживания.
- Управление запасами: процессы принятия решений, связанные с мониторингом состояния запасов сырья, готовой продукции и т.д. и развертыванием операций, связанных с их управлением.
- Управление качеством: оценка, документирование и управление качеством.
Как правило, на заводе за это отвечают отдел главного технолога и управление контроля качеством (лаборатории).
2.7 Заключение
В настоящей главе мы рассмотрели общие особенности системы управления производством на разных ее уровнях. Кратко описали каждый из уровней и составили основные диаграммы.
Не забываем, что время и информативность решений увеличиваются по мере увеличения уровня. На самом низком уровне система контроля работает очень быстро (один датчик) - собственно там и контроля-то нет, просто получение информации. На более высоких уровнях система работает гораздо медленнее (множество датчиков и процессов). Так на уровне АСУТП (2ой) время отклика всей системы на управляющее воздействие вполне может превышать 45-60 мин. (за это время может быть произведено сотни тонн готового продукта). На уровне менеджмента (4ый) происходит агрегирование информации по всему заводу за промежуток времени от суток и больше (суточные, недельные, квартальный, полугодовые и годовые отчеты о производственной деятельности).
При этом каждый из уровней соединен по тому или иному протоколу связи (как внутри себя, так и друг с другом) и все это образует единую информационную систему предприятия. Это относиться не только к высокому уровню, но и к сетям низкого уровня для связи компьютеров и ПЛК с датчиками и актуаторами (вспоминаем промышленные протоколы связи).
Конкретный пример технического задания на разработку системы АСУТП на примере прокатного цеха представлен в приложении ниже (2.8). В примере раскрываются основные функции в современных системах автоматизации и элементы, которые используются для их реализации.
2.8 Приложение А. Пример Технического задания для разработки автоматизированной системы управления технологическим процессом (2ой уровень управления) (TODO: может у кого есть более свежий пример?)
Данное приложение содержит спецификацию производственного участка холодного проката (PL-TCM), который обычно включает в себя линии:
- подачи,
- сортировки,
- травления,
- сдвоенного (тандемного) холодного проката.
Рассмотренная ниже спецификация обычно составляется при закупке и установке систем автоматизации для промышленных предприятий. Некоторые из описанных далее терминов и понятий будут рассмотрены в последующих главах более подробно.
Примечание. Линия травления и тандемный стан холодной прокатки (Pickling Line and Tandem Cold Mill, PL-TCM) как правило состоит из трех основных секций, а именно: секции травления для очистки поверхности полосы от оксидного слоя; секции боковой обрезки для обрезки краев полосы; и секции TCM для прокатки для достижения заданной толщины.
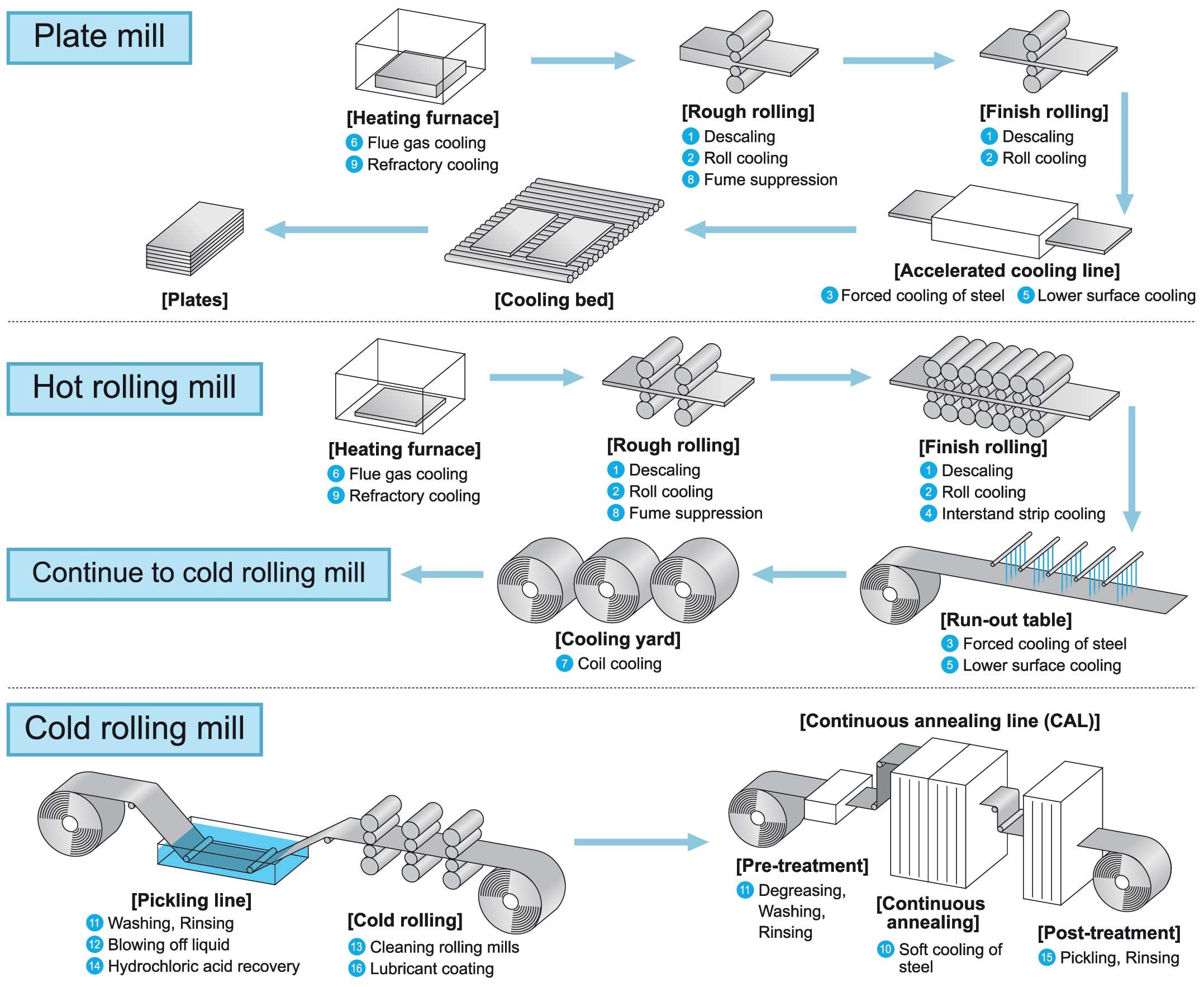
Рис. 2.10. Линия травления и тандемный стан холодной прокатки (https://www.ikeuchi.eu/solutions/industries/steel-making-industry/plate-mill-rolling-mill-production/). Платформы (Platforms): Все указанные уровни управления должны быть реализованы с помощью программируемых логических контроллеров (ПЛК), микропроцессорных систем, а также ПК / рабочих станций по мере необходимости.
Каждая из систем автоматизации PL-TCM должна быть выделена в отдельный цикл управления в соответствии с функциональными требованиями и должна включать управляющие воздействия в разомкнутом и замкнутом контурах.
Режимы работы (Modes of operation): В основном, системы должны иметь два режима работы. В полуавтоматическом режиме параметры должны вводиться вручную опретором для различных участков PL-TCM через дисплей (VDU), и программа должна передавать эти значения циклам управления в соответствующей временной последовательности. В полностью автоматическом режиме система должна вычислять все установочные значения через математические модели и передавать их подчиненным системам управления по выбранному каналу передачи данных (тут можно указать конкретный канал передачи данных или оставить это на усмотрение исполнителя).
2.8.1 Базовый уровень
Функции, которые должны выполняться системой автоматизации базового уровня, должны охватывать, но не ограничиваться следующим.
- Функциональность на базовом уровне:
Базовый уровень должен охватывать управление всем оборудованием, установление очередности, блокировку, слежение, специализированные технологические функции, хранение графиков прокатки и контрольных таблиц, протоколирование неисправностей и событий и т.д. Некоторые из них перечислены ниже.
- Блокировки (interlocking), определение очередности (sequencing control) и последовательное управление оборудованием (например, для управления лентами (strips), управления резкой (shear) и т.п.). В том числе для автоматической обработки металлических катушек (coil) на входе и выходе, автоматическую последовательную работу сварочного/переварного (welding/rewelding) аппарата и управление последовательностью заправки лент (strip), а также для кислотной регенерационной системы (кислотного травления для очистки от оксидов, acid regeneration plant).
- Расчет диаметра и ширины катушки на входных распределительных барабанах (reels).
- Позиционное управление ушками катушек (coils ears) для центрального размещения катушек на стержнях (mandrels).
- Генерация эталонных значений скорости для линии в зависимости от условий ее работы и ввода оператора, а также в зависимости от нагрузки на систему управления приводом.
- Управление скоростью синхронизации приводов по мере необходимости.
- Управление натяжением ленты (положением и прогибом) за счет управления соответствующими приводами и механизмами.
- Центрирование валков с механическим приводом (power operated rolls), рулевых валков (steering/dancer rolls); управление положением лафетных вагонов (looper car). Автоматическое управление предварительной настройкой, измерение и контроль для датчика уровня натяжения (tension leveller). При необходимости автоматический контроль положения краев на натяжных барабанах (tension reels).
- Контроль начального сдвига (entry shear) для автоматической резки полосы.
- Контроль параметров травления (pickling parameters) с учетом скорости полосы в травильном участке.
- Автоматическая настройка боковых триммеров (side trimmer).
- Захваты, упорядочение и управление устройством для зачистки ленты (scrap baller), если таковое предусмотрено.
- Автоматическая калибровка для контроля положения/точного позиционирования (по мере необходимости).
- Ручное/автоматическое замедление/остановка ленты в точке сварки (weld point), боковом обрезчике, фрезерном и выходном срезах (mill and exit shear) на нивелире натяжения (т.е. на заданном уровне натяжения).
Управление технологическими функциями тандемного станка, такими как:
датчики натяжения;
- контроль формы;
контроль прокатных усилий (roll force).
Хранение графиков прокатки сдвоенного (тандемного) станка, для всей номенклатуры продукции и всех возможных вариаций. Должны быть составлены подходящие справочные таблицы для операторов по настройке линии/оборудования в качестве руководства.
- Автоматическая смена валков наряду с автоматическим позиционированием шпинделей (spindle).
- Управление линией прокатки с учетом данных об износе валков, а также после смены валков.
- Автоматическое управление вращающимися резцами перед натяжным валком.
- Автоматическое управление очередностью работы контрольных валков.
- Обеспечение ручного замедления/остановки ленты, а также контроля "пробега" для проверки дефектов на нивелире натяжения, входа в боковой триммер и выхода после прокатного стана с помощью специальной кнопки (push button station).
- Слежение за лентой и изменение установленных значений для обеспечения непрерывной работы с лентами различного размера.
- Настройка прокатного стана либо по сохраненному графику прокатки (ручной режим), либо по показаниям технологического процесса (с возможностью выгрузки и модификации оператором) (автоматический и полу-автоматический режим).
Автоматическое управление поточным взвешиванием, маркировкой и круговой обвязкой катушек после их доставки, включая натяжные барабаны.
Функции для операторов на базовом уровне:
Централизованная система диспетчерского управления должна быть обеспечена специализированными процессорами и MMI (man-machine interface, UI) на базовом уровне. Все необходимые сигналы должны приниматься через систему управления вводом, а также непосредственно от датчиков/устройств. Система должна быть способна выполнять следующие основные действия:
- Централизованное включение и запуск различных линейных приводов (line drives) и вспомогательных систем (auxiliary system) с помощью мнемосхем (mimic display).
- Отображение состояния приводов и электрооборудования завода для технического обслуживания.
- Контроль и отображение значений для главных приводов прокатного стана и других приводов большой мощности для аварийных сигналов и аварийного отключения (например температуры обмоток).
- Централизованное переключение и индикация состояния распределительных щитов (switchboards) 33 кВ и 6,6 кВ.
- Индикация отдельных линейных схем распределительных щитов 33 кВ и 6,6 кВ, главных приводов, линейных вспомогательных приводов и т.д.
- Сбор сигналов о неисправностях с различных участков предприятия с возможностью отображения и распечатки сообщений о неисправностях в текстовом виде.
2.8.2 Комплексные функции
Функциональность на уровне управления процессом.
Уровень управления процессом отвечает за вычисление и управление оптимизацией работы. На этом уровне должны быть реализованы такие функции, как:
- генерация задаваемых значений с использованием математических моделей,
- обучаемое управление,
- отслеживание материалов внутри технологической линии/участка цеха,
- ввод первичных данных для моделей (включая первичные данные для последующей оптимизации),
- управление функциями процесса в реальном времени с учетом данных от базового уровня,
- генерация отчетов и т.д.
Cпецифические функции, которые должны выполняться автоматизированной системой.
- Слежение за катушкой внутри технологической линии/агрегата путем считывания пробитых отверстий (punched holes) по сварным швам (weld seams).
- Ввод первичных данных (primary data input, PDI) катушек на входе в PL-TCM с обеспечением последующей выгрузки данных управления производством.
- Генерация рабочих значений для прокатного стана с использованием данных PDI, модели стана, модели усилия прокатки, модели мощности, модели контроля толщины полосы, модели контроля формы/профиля с тепловым контролем плоскостности полосы, а также других участков.
- Обучающий (адаптивный) контроль с использованием фактических данных и математической модели для расчетов настроек.
- Хранение значений положения нивелиров, боковых триммеров.
- Ввод данных о дефектах полосы вручную через инспекционную панель на объекте поточного контроля после бокового триммера.
- Обработка фактических данных о работе прокатки, создание отчетов и отправка данных на уровень управления производством.
Функции информационной системы.
Информационная система, как правило, должна соответствовать следующим функциям:
- Производственные данные должны быть доступны соответствующему персоналу в виде журналов и отчетов.
- Вывод журналов и отчетов в заданное время или при наступлении определенных событий.
- Должна быть обеспечена возможность изменения элементов и форматов журналов без дополнительного вмешательства в работу системы.
- Записанная в журнале информация должна храниться в течение адекватного периода времени, обеспечивающего доступность исторических данных.
- Информация в системе должна проверяться на целостность, достоверность и правдоподобие с последующим оповещением оператора.
Пользовательский интерфейс (MMI, UI).
Визуализация в системе должна осуществляться через интерфейс MMI для обеспечения управления и эксплуатации всей линии PL-TCM. Система должна отображать следующие экраны, с возможностью печати на бумажном носителе:
- Имитация процесса для всей линии PL-TCM с помощью различных схем с выводом информации о состоянии всех важных приводов, а также с фактическими значениями всех важных параметров.
- Динамическая информация в виде гистограммы для отображения эталонных и фактических значений важных параметров.
- Графики, на которых отображаются тренды важных параметров процессов.
- Сбор фактических параметров (среднее/максимальное/минимальное) для всей линии PL-TCM для генерации журналов по отдельным процессам и по производству в целом.
Стандарты.
Предлагаемые контроллеры и другое оборудование на базе микропроцессоров должны быть спроектированы/структурированы, изготовлены и испытаны в соответствии с рекомендациями, изложенными в МЭК-1131 (часть 2) (IEC-1131, part 2), с учетом (и за исключением) параметров отраслевых стандартов, принятых соответствующими производителями.
Аппаратное обеспечение.
Аппаратное обеспечение каждого основного контроллера/оборудования должно включать в себя основной блок обработки данных, модули памяти, стабилизированный блок питания, необходимые модули интерфейса связи, вспомогательное запоминающее устройство (при необходимости), модули ввода/вывода (I/O), удаленные станции ввода/вывода и инструмент программирования и отладки (programming and debugging tool, PADT). Аппаратная и программная структура должна быть модульной, чтобы отвечать широкому спектру технологических требований. Модули ввода/вывода должны свободно конфигурироваться в зависимости от требований.
Сеть.
Сетевое обеспечение должно соответствовать следующим спецификациям:
- На каждом из двух уровней автоматизации все контроллеры и системы должны быть подключены в качестве отдельного узла к соответствующей шине данных локальной сети с использованием стандартизированных аппаратных и программных средств.
- Система LAN должна соответствовать стандарту ISO-Open System Interconnect.
- Все оборудование на уровне приводов должно быть надлежащим образом связано с базовым уровнем для эффективного обмена данными/сигналами между этими двумя уровнями. Однако все аварийные сигналы и сигналы безопасности должны быть подключены непосредственно к соответствующим контроллерам.
- Аналогичным образом системы LAN для базового уровня и уровня управления процессом должна быть надлежащим образом связана соответствующим мостом/интерфейсом для эффективного обмена данными/сигналами. Должна быть также предусмотрена соответствующая связь между уровнем управления процессом и системой автоматизации производства.
- Шины передачи данных должны быть сконструированы таким образом, чтобы обеспечивать оптимальную загрузку, и это должно быть четко указано в коммерческом предложении.
- Дистанционные вводы/выводы измерительных приборов и машин на микропроцессорной основе (весы, машины для маркировки и кольцевого обвязывания катушек и т.д.) должны быть соединены по последовательным каналам связи (serial) с соответствующими контроллерами.
- Персональные компьютеры и рабочие станции должны быть подключены по локальной сети соответствующего уровня.
Данные и визуализация.
В отношении безопасности, достоверности и правильной визуализации данных применяются следующие спецификации:
- Все интерфейсы оператора (включающие цветной дисплей (VDU) и клавиатуру в качестве MMI для взаимодействия с соответствующей системой), должны быть подключены к соответствующей системе локальной сети.
- Для предотвращения несанкционированного проникновения в систему должны быть предусмотрены блокировка клавиатуры/пароль.
- Должна быть также предусмотрена проверка действительности и плановости входа оператора.
- Для систем автоматизации должен быть предусмотрен инженерный пульт, состоящий из процессора, цветного VDU, клавиатуры/мыши и принтера. Консоль должна иметь необходимое аппаратное и программное обеспечение для связи с локальной сетью и иметь доступ ко всей системе. Основными функциями пульта должны быть автономная конфигурация базы данных, разработка программ, документаций и т.д.
Прикладное программное обеспечение.
Прикладное программное обеспечение должно быть представлено через программные модули из функциональных блоков, а также программные модули высокого уровня на базе программного обеспечения с соответствующим языком программирования.
Программное обеспечение должно быть удобным для пользователя, снабжено вспомогательными функциями и т.д. Для всей системы должен использоваться только один язык программирования. Однако для простых логических функций может использоваться другой язык программирования последовательного типа. Должно предоставляться только отлаженное и протестированное в промышленных условиях (или разработанное по производственным стандартам) программное обеспечение.
2.8.3 Обоснование для выбора системы
Будущее расширение. Выбор оборудования, стандартного программного обеспечения и сети должен быть таким, чтобы обеспечить оптимальную гибкость для будущего расширения, не влияя на надежность системы.
Надежность. Система должна быть спроектирована так, чтобы работать в автоматическом или полуавтоматическом режиме в условиях отказа (некоторых подсистем или всей системы в целом).
Запасная емкость. Система должна иметь достаточную вычислительную емкость для выполнения всех необходимых функций. При этом минимум 30% общей памяти должно оставаться не распределенным для использования в будущем.
Загрузка. Магистраль данных должна быть спроектирована таким образом, чтобы обеспечить оптимальную загрузку, и это должно быть четко указано в коммерческом предложении.
Структура программного обеспечения и качество программ. Программы должны быть выполнены на языке высокого уровня, который является эффективным и экономичным для предлагаемой системы с точки зрения модуляризации, скорости кодирования, использования памяти и времени работы. Структура программного обеспечения системы должна быть оптимально распределена/централизована для контроля и управления смежными технологическими областями в соответствии с современным уровнем архитектуры.
Интеграция. Коммуникационное программное обеспечение должно быть таким, чтобы системы могли независимо общаться между собой и с системой автоматизации базового управления/процессного контроля нижнего уровня (при необходимости). Должна быть предусмотрена возможность взаимодействия системы управления производством PL-TCM с системой управления более высокого уровня (АСУТП), которая в будущем будет развернута для всего металлургического завода.
Программируемость. Информационная система должна быть спроектирована таким образом, чтобы можно было изменять элементы данных и форматы журналов без излишнего вмешательства в работу системы.
Целостность и защита данных. Записанная в журнал информация должна храниться в течение соответствующего периода времени, обеспечивающего доступность записи исторических данных. Данные, получаемые системой, должны проверяться на целостность с точки зрения их достоверности и правдоподобия с помощью системы оповещения. Должно обеспечиваться хранение и запись важнейших данных при отключении системы электроснабжения или во время сбоя.
2.9 Задачи по разделу
- Нарисуйте функциональную блок-схему типичного сенсора.
- Нарисуйте функциональную блок-схему актуатора.
- Рассмотрим электрогидравлический сервопривод клапана (рис. 2.6). Изучите и определите подсистемы актуатора и разделите эти подсистемы на классы элементов.
- Нарисуйте блок-схему типичной промышленной системы управления 1 уровня.
- Рассмотрим систему управления положением с приводом от двигателя, как это обычно бывает в приводах станков с ЧПУ (рис. 2.9). Определите основные датчики обратной связи в системе. Определить основные источники помех. Чем такой привод отличается от автоматической конвейерной системы?
- Укажите основное различие системы последовательного логического управления от аналоговых систем управления.
- Приведите пример и опишите промышленную систему, использующую дискретные датчики и дискретные исполнительные механизмы.
- Назовите три основные функции системы диспетчерского контроля.
- Изложить три основные функции системы управления производством.
- Изучить и выяснить конкретные виды деятельности для контроля производства на любом типичном заводе. Нарисуйте пирамиду автоматизации и определите уровни.
- Укажите три основные характеристики системы автоматизации, упомянутые в приложении А (раздел 2.8).
3. Основные характеристики измерительных систем
3.1 Введение и цели
Раздел посвящен основным параметрам (измерительным и статистическим), которые, как правило, приводятся в спецификациях на тот или иной сенсор. Не забываем, что ваш основной документ - это характеристика (specification, datasheet), которая предоставляется производителем сенсора/актуатора (да и любого другого устройства в электронике). Часто, эти спецификации используют различный стиль и терминологию, что может сбивать с толку. Однако всякий датчик характеризуется соотношениями между измеряемой величиной (вход) и его выходной величиной (которую он порождает на выходе в ответ на измеряемую величину). И существует всего два основных типа таких характеристик:
- статические (включая случайную природу);
- динамические.
Как мы уже говорили ранее, сенсор - это некая система (черный ящик). И, как и любая другая система, она может находиться в одном из двух режимов: стационарном (установившемся) и переходном (не путать со статическим и динамическим - это разные вещи).
Задача. Подумайте почему стационарный и переходный режимы и статические и динамические характеристики не одно и тоже. Приведите примеры.
Стационарный (установившийся) режим – обусловлен постоянным во времени расхождение между истинным значением регулируемой величины и ее заданным значением (отношение вход/выход - постоянная величина). Стационарный режим работы системы в свою очередь может быть двух видов: статический и динамический.
- Статический стационарный режим – это режим, при котором система находится в состоянии покоя вследствие того, что все внешние воздействия и параметры системы не меняются во времени. Другими словами, скорость изменения выходного параметра системы равна нулю (например, так работает любой электронный усилитель). Т.е. существующая ошибка управления стремится к постоянному значению, зависящему от величины воздействия (но не зависящему от времени). Обычно такой режим представляют в линейном виде (прямая с коэффициентом наклона \(k\)). Если модель объекта нелинейна, то обычно ее преобразуют к линейному виду путем линеаризации (например логарифмирование и т.п.).
Динамический стационарный режим – это режим, при котором приложенные к системе внешние воздействия изменяются по какому-либо установившемуся закону. В результате чего система переходит в режим установившегося вынужденного движения, т. е. скорость или ускорение выходного параметра системы постоянно во времени. Такой режим используется для снятия частотных характеристик и бывает двух типов:
- детерминированный динамический стационарный режим – при котором на систему действуют детерминированные (регулярные) динамические стационарные воздействия (например, гармонические колебания).
- случайный динамический стационарный режим – при котором на систему действуют случайные динамические стационарные функции (TODO: привести пример).
Переходный режим – режим изменения во времени различных переменных системы (фазовые или выходные параметры, скорость или ускорение), в ходе которого система стремится к стационарному режиму (изменяет свое состояние и стремится перейти в новый или вернуться в старый стационарный режим).
Примечание. Изменение во времени или ускорение можно оценить через производную.
Далее мы кратко рассмотрим характеристики каждого из режимов работы системы и параметры, которыми она обладает
3.2 Статические характеристики стационарного режима работы системы
Для такой системы любое ее звено (а как следствие и вся система) описывается уравнениями вида \(y = F(x,f)\), в которых отсутствует параметр времени \(t\). Соответствующие им графики называются статическими характеристиками системы.
Статическую характеристику часто изображают графически с учетом количества входов (рис. 3.1). По сути это калибровочная кривая (градуировка) - зависимость отклика датчика от входящего параметра. Важно! - вид данной характеристики не зависит от времени.
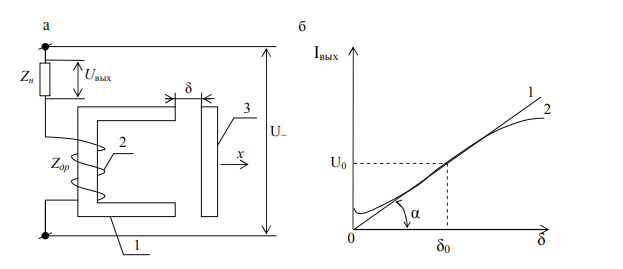
Рис. 3.1. Схема включения (а) и статические характеристики (б) однотактного индуктивного датчика с плоскопараллельным воздушным зазором: 1 - идеальная (холостой ход) и 2 - реальная (нагрузочная). В качестве другого примера рассмотрим обычный механический рычаг. Его можно рассматривать как "сенсор", функцией которого является усиление (или ослабление) входящего сигнала (давим с одной стороны, чтобы применить силу с другой стороны рычага). Тогда статическая характеристика для него имеет вид \(y = kx\). При это входной сигнал будет меняться в \(k\) раз. Коэффициент \(k = y/x\) (отношение выходной и входной величины, в нашем случае - плечи рычага) называется коэффициентом усиления звена (звено в нашем случае - это сам рычаг). Когда входная и выходная величины имеют разную природу (т.е. коэффициент имеет размерность), его называют коэффициентом передачи.
Для статических характеристик есть ряд параметров, которые нужно учитывать:
Диапазон (R, range, span) - определяет минимальное и максимальное значения входных и выходных значений для которых рекомендуется использовать устройство. Как правило, берется диапазон в котором отклик устройства будет линеен (например, \(100-500^o C\) для термометра).
Чувствительность (k, sensitivity) - отношение между выходным и входным сигналом (обычно чем больше, тем лучше). Определяя чувствительность, принимают линейность входных-выходных характеристик (для определенного диапазона). Например, если чувствительность термопары \(\frac{10 мкВ}{^o C}\), то она указана для "линейного" рабочего диапазона.
Задача. Более наглядно понятие чувствительности проявляется для пружины: как думаете о чем нам говорит величина 25 мм/кг?
Примечание. Чувствительность - не константа, она может зависеть от внешних условий эксплуатации (например, температуры). Подобное явление называется дрейф чувствительности. Для устранения подобного дрейфа в точных приборах используют контроль внешних параметров и их учет.
Пример. Допустим, чувствительность пружины при \(20^o C\) составляет 25 мм/кг, а при \(30^o C\) - 27 мм/кг. Тогда дрейф чувствительности равен \(0.2 \frac{мм}{кг} \cdot \frac{1}{^o C}\).
Линейность (О, linearity) - максимальное отклонение от линейной модели. На практике зависимость выходного сигнала от входа обычно не линейна и нам нужно вводить различные коэффициенты (приближения), которые и характеризуют понятие линейности прибора (рис. 3.1, рис. 3.2).
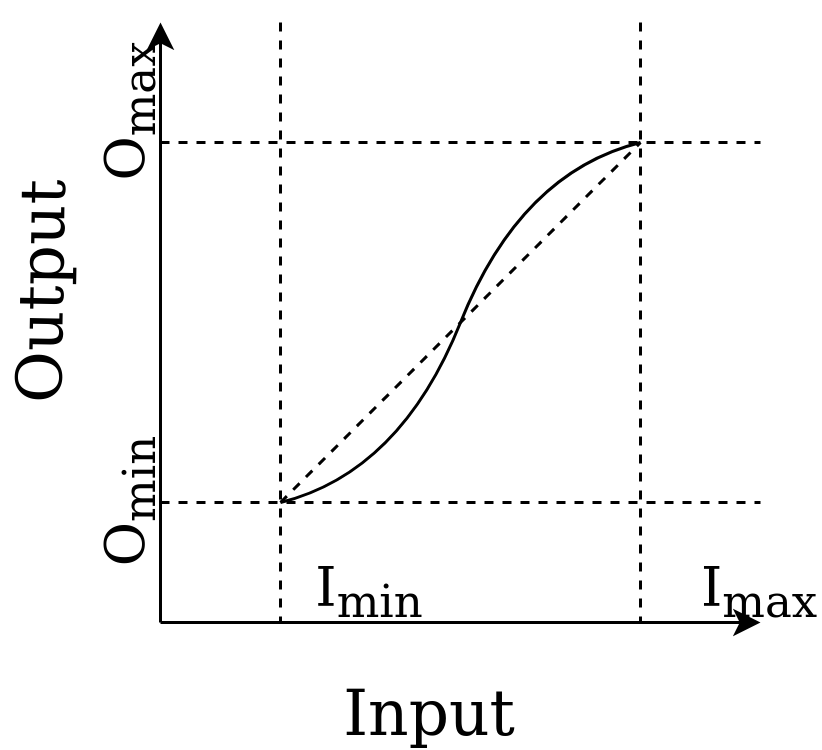
Рис. 3.2. Линейность устройства. $$ Linearity = \frac{\Delta O}{O_max - O_min} $$где \(\Delta O = max(\Delta O_1, \Delta O_2)\).
Примечание. Кроме коэффициента линейности, для оценки линейности и вида взаимосвязи между двумя величинами используют различные статистические параметры, такие как коэффициенты корреляции (Пирсона, Спирмана и др.).
Линейный диапазон работы (linear range) - диапазон входного сигнала, при котором мы получаем линейный отклик. Особенно важная характеристика для проведения точных измерений и если у датчика малая чувствительность.
Гистерезис (Hys. %, Hysteresis) - отклонение между возрастанием и убыванием сигнала (т.е. при одинаковом входном сигнале может быть разный выходной сигнал). Данное явление существует, как правило, в магнитных полях, но не ограничивается ими. Например, на рис. 3.3 показано отклонение манометра мембранного типа для одного и того же давления (возрастающего и убывающего).
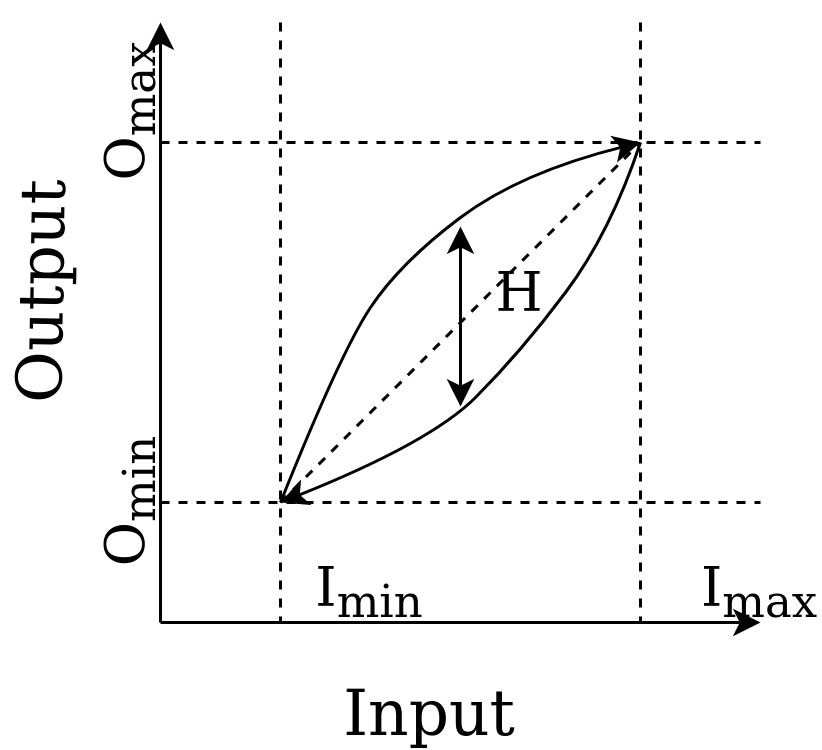
Рис. 3.3. Гистерезис на примере манометра мембранного типа для одного и того же давления (возрастающего и убывающего). $$ Hysteresis = \frac{H}{O_{max} - O_{min}} \cdot 100 $$где \(H\) - максимальный гистерезис (максимальная разница результатов при одинаковом входящем сигнале).
Разрешение (Res. %, resolution) - сколько информации от входящего сигнала содержится в выходящем. Другими словами, разрешение определяет минимальное детектируемое изменение во входящем сигнале:
$$Resolution = \frac{\Delta I}{I_{max} - I_{min}} \cdot 100$$Коэффициент между измеряемым диапазоном и разрешением часто выражается в виде динамического диапазона (Дб, dB) (привет наушникам) и определяется как:
$$Dynamic\_range = \frac{measurment\_range}{resolutions}$$Пример. Восьми битный двоичный АЦП (ADC) преобразователь со входящим сигналом +5В может измерить минимальное напряжение \(\frac{5}{2^8-1}\) или 19.6 мВ (напомним, что двоичный 8-разрядный АЦП способен выдать 255 дискретных значений (0…255), поскольку \(2^8 = 256\) и 1 тратится на аппаратные затраты).
При этом динамический диапазон n-битного ADC приблизительно равен \(6 \cdot n\) дБ.
Разбор. Для АЦП динамический диапазон соответствует количеству бит, которые используются для цифровизации аналогового сигнала. Для идеального n битного АЦП минимальное детектируемое значение - это минимальный значимый бит (least significant bit, LSB). Тогда максимальное значение будет \((2n - 1) \cdot \text{LSB value}\).
Тогда:
\(DR = 20 \cdot log_{10}(\frac{(2n-1) \cdot LSB}{LSB}) \approx 6.02 \cdot n\) (dB).
Таким образом, с 10-битным двоичным АЦП мы ожидали бы динамический диапазон 6.02 дБ. Кроме того, надо учитывать, что 10 битный двоичный АЦП сможет разрешать амплитуды сигналов от \(x\) до \(2^{10}x = 1024x\), где \(x\) - это минимально допустимый уровень, который может быть обнаружен.
Точность (accuracy, случайная природа) - близость измеренного значения к фактическому или истинному значению, выражается в виде максимальной погрешности (измеренное значение - истинное значение) в процентах от максимального показания шкалы (это читерство, но для сенсоров так и делают!). Учитывает случайную и систематическую погрешности.
Например, если точность термометра в диапазоне \(0-500^oC\) задана как \(\pm 0.5%\), то измеренное значение всегда будет находиться в пределах \(\pm 2.5^oC\) от истинного (измеренного с помощью поверенного прибора в процессе калибровки). Но, при \(250^oC\), ошибка также будет \(\pm 2.5^oC = 1 %\) (!). Поэтому всегда лучше выбирать шкалу измерений, где входной сигнал близок к максимальному значению. При этом не забываем, что истинную величину всегда трудно получить, для ее измерения используют стандартные калиброванные приборы в специальных лабораториях.
Воспроизводимость (прецизионность, случайная природа) - повторяемость показаний прибора (не путать с точностью!). Если мы будем измерять одну и ту же величину в течении интервала времени (например, в течение дня), то показания расположатся в определенном интервале в случайном порядке (случайная погрешность).
Эти случайные колебания показаний (в основном с гауссовым распределением) часто обусловлены случайными колебаниями ряда факторов, которые не были приняты во внимание при измерении переменной. При использовании прецизионного прибора последовательно полученные значения будут очень близким, но не одинаковыми по своим абсолютным значениям, а стандартное отклонение будет очень малым.
Количественно, точность может быть выражена через воспроизводимость следующим образом:
$$Precision = \frac{\text{measured range}}{\sigma_e}$$Нужно четко понимать различие между воспроизводимостью и точностью (рис. 3.4)!
Воспроизводимость гарантирует повторение последовательных показаний (т.е. случайная погрешность мала), но не гарантирует их точность - измерения могут быть близки друг к другу, но далеки от истинного значения (систематическая погрешность велика). С другой стороны, точный прибор должен быть и воспроизводимым (т.е. случайная ошибка должна быть мала).
Для статической характеристики обычно используют прямую пропорциональную зависимость между установившимися значениями входной и выходной величин (очень часто весьма приближенно). Зависимость между установившимися значениями входной и выходной величин применительно к датчикам также называют калибровочной кривой (тарировочной, градуировочной).
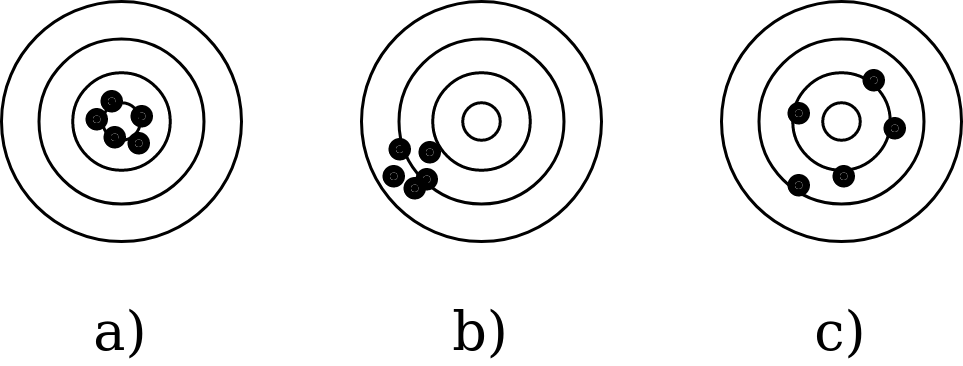
Рис. 3.4. Точность и воспроизводимость (случайная и систематическая погрешность). Примечание. В ряде случаев для удобства дальнейшего анализа фактическая нелинейная статическая характеристика датчика в определенных пределах измерения и с определенным влиянием на показания этого датчика может быть приближенно заменена неким линейным эквивалентом. Операция такой замены, по существу, означает разложение нелинейной функциональной зависимости, связывающей выходную и входную величины, в степенной ряд Тейлора с последующим отбрасыванием членов разложения 2-го и более высоких порядков. В определенных условиях такая операция является допустимой, и тогда она носит название линеаризации.
3.3 Динамические характеристики стационарного режима работы системы
Под динамической характеристикой датчика понимают поведение выходной величины во время переходного процесса (в ответ на изменение его входной величины).
Если в статической характеристике датчика строится зависимость только между значениями выходной величины \(Y\) и входной величины \(X\), то в динамической характеристике датчика участвует также и параметр времени \(t\) (динамическая характеристика описывается зависимостью вида \(Y(t)\)).
Пример. Такие характеристики описывают "скорость реакции на изменения". Например, человеческий глаз не может обнаружить ни одного события, продолжительность которого составляет менее одной десятой секунды (динамические характеристики человеческого глаза не очень). К этому же виду параметров относится и "мертвое время детектора" - сколько измерений в единицу времени детектор упускает из рассмотрения за счет их большой скорости изменения.
Для сравнения динамических характеристик различных датчиков принято считать, что при прочих равных условиях на их входы поступают воздействия одного и того же вида, а именно — ступенчатые. Это означает мгновенный «наброс» входной величины. На практике это соответствует, например, подаче напряжения на электродвигатель либо помещению термопары в закалочную печь и т. д. Двигатель будет набирать обороты не мгновенно, а в соответствии с динамическими свойствами привода, в который он включен. Точно так же показания термопары начнут отражать температуру в печи не мгновенно, а по мере разогрева ее спая и т. д. Характерные примеры динамических характеристик датчиков приведены на рис. 3.5.
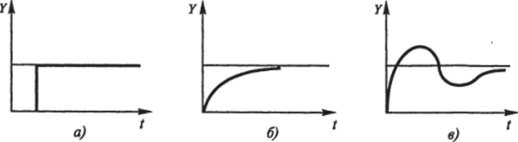
Рис. 3.5. Динамические характеристики датчиков при ступенчатом входе. Разбор каждого случая приведен ниже. На рис. 3.5 (а) приведено "чистое запаздывание" в датчике, когда его выходная величина просто повторяет в определенном масштабе входную величину, запаздывая по отношению к ней на постоянную величину.
На рис. 3.5 (б) показан апериодический характер переходного процесса, когда выходная величина постепенно приближается к новому установившемуся значению монотонным образом (монотонно убывая или, как показано на рисунке, монотонно возрастая).
Рис. 3.5 (в) соответствует так называемому колебательному характеру переходного процесса, когда выходная величина постепенно приближается к новому установившемуся значению, совершая за время переходного процесса одно или несколько колебаний, превышая на время новое значение выходной величины, а затем возвращаясь к нему.
Динамические процессы в датчиках характеризуются так называемыми показателями качества переходного процесса:
- время завершения переходного процесса;
- величина превышения выходного параметра над его новым установившимся значением (в течение переходного процесса);
- степень колебательности (число колебаний) переходного процесса.
Кроме того, часто используется так называемый интегральный показатель качества переходного процесса, обычно представляющий собой площадь под кривой переходного процесса (т.е. интеграл).
Математически, динамические характеристики устройства обычно выражаются дифференциальным уравнением, связывающим входные и выходные величины. Для этого используют понятие передаточной функции. Эта функция - компактное описание взаимосвязи входящих и выходящих величин (как правило, через дифференциальные уравнения).
Примечание. Помимо передаточной функции, математическая модель системы может быть представлена аналитически (другими уравнениями), графически (переходными или частотными характеристиками) или в табличной форме.
В зависимости от используемых операторов линейные непрерывные модели делят на временные и частотные. К временным моделям относятся те, у которых аргументом является время. Это дифференциальные и разностные уравнения, записанные в явном виде или в операторной форме. Частотные модели предусматривают использование переменных операторов, аргументом которых является частота соответствующего сигнала (операторы Лапласа, Фурье и т. д).
В завершении раздела подчерку еще раз, что как вход, так и выход в случае динамических систем являются переменными по времени. Система с одним входом и одним выходом называется SISO (Single Input Single Outlet Output - система с одним входом и одним выходом), существуют так же и MIMO системы (Multi Input Multi Output), но в рамках настоящего курса мы будем работать только к системам SISO.
3.3.1 Передаточная функция (transfer function) (TODO: разобрать примеры подробнее, конкретно - что делать со временным сдвигом?)
Передаточная функция представляет собой удобное представление линейной и неизменной во времени динамической системы. Математически, передаточная функция является дифференциальной функцией комплексных переменных (для систем с конечной размерностью). Передаточную функцию можно получить с помощью эксперимента или алгебраических манипуляций с дифференциальными уравнениями, описывающими систему.
Дифференциальные уравнения.
Самым простым представлением системы является обычное дифференциальное уравнение (ODE, любое движение, а значит и динамический процесс в системах автоматического управления можно математически описать в виде дифференциального уравнения).
Дифференциальное уравнение представляет собой аналитическую зависимость, связывающую изменение выходной величины \(у\) от входной \(х\), с учетом скорости и ускорения данных величин (т.е. с учетом их изменения во времени). Порядок или степень дифференциального уравнения – наибольший порядок производных, входящих в него. Вид дифференциального уравнения зависит от свойств системы. В простейших случаях это линейные дифференциальные уравнения с постоянными коэффициентами.
Примечание. При работе с обычными дифференциальными уравнениями зависимые переменные являются функцией положительной вещественной переменной \(t\) (часто это время). Применяя трансформацию Лапласа, мы переключаемся с функции времени на функцию сложной переменной \(s\) (частота) и дифференциальное уравнение становится алгебраическим уравнением.
Всегда удобно выражать динамические характеристики на входе-выходе в виде линейного дифференциального уравнения. Поэтому часто нелинейная математическая модель линеаризируется и только потом вычисляется передаточная функция и порядок системы.
Графически, линеаризацию некоторого уравнения от двух переменных \(F(х,у) = 0\) в окрестности некоторой точки \((х_0, у_0)\) можно представить как замену рассматриваемого участка кривой на касательную (рис. 3.6), уравнение которой определяется по формуле
$$ \frac{\delta F}{\delta x} dx + \frac{\delta F}{\delta y} dy = 0 $$
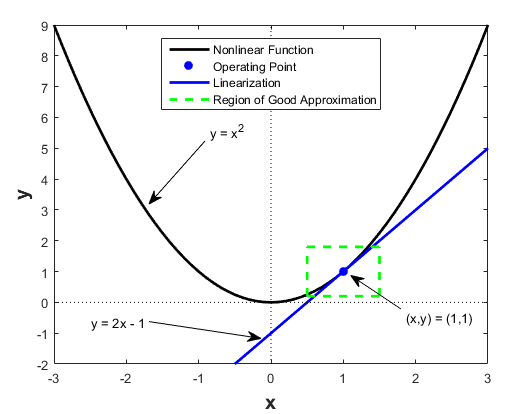
Рис. 3.6. Линеаризация в графической форме (https://kr.mathworks.com/help/slcontrol/ug/linearizing-nonlinear-models.html). Это один их способов линеаризации нелинейного уравнения. Другой способ заключается в разложении в ряд Тейлора. Пусть в установившемся режиме части системы (или ее звена) описываются нелинейным алгебраическим уравнением \(y = f(x)\), а входная и выходная величины имеют значения \(х_0\) и \(y_0\). Тогда нелинейную функцию можно разложить в ряд Тейлора в окрестностях выбранной точки \((х_0, y_0)\) и, отбросив члены ряда выше первого порядка, получить выражение
$$ \begin{equation}\begin{aligned} y & \approx f(x_0) + (\frac{df}{dx})_0 (x - x_0)\\ y - f(x_0) & = k \Delta x\\ \Delta y & = k \Delta x \end{aligned}\end{equation} $$где \((\frac{df}{dx})_0\) - производная функции по \(x\) в установившемся режиме (т.е. это касательная в точке \(x_0\)) при этом данная касательная выражается тангенсом угла наклона (мы ее заменяем на коэффициент \(k = tg \alpha\)).
Преобразование Лапласа
Такое преобразование "переключает" функции времени на функцию частоты (сложной переменной). Например, функционирование некоторой системы описывается уравнением вида
$$ a_0 \frac{d^2 y}{dt^2} + a_1 \frac{dy}{dt} + a_2 y = b_0 \frac{dx}{dt} + b_1 x $$где \(х\) и \(у\) – входная и выходная величины.
Если в данное уравнение вместо \(x(t)\) и \(y(t)\) подставить функции \(X(p)\) и \(Y(p)\) комплексной переменной величины \(p\), такие, что:
$$ \begin{equation}\begin{aligned} X(p) & = \int_0^\inf x(t) e^{-pt} dt Y(p) & = \int_0^\inf y(t) e^{-pt} dt \end{aligned}\end{equation} $$Таким образом, исходное уравнение при нулевых начальных условиях равносильно линейному алгебраическому уравнению
$$ a_0 p^2 Y(p) + a_1 p Y(p) + a_2 Y(p) = b_0 p X(p) + b_1 p X(p) $$где \(p = \frac{d}{dt}\)
Переход от одной модели (временной) к другой (частотной) достаточно прост и заключается в замене дифференциалов \(\frac{d^n}{dt^n}\) на операторы \(p^n\), интегралов \(\int \dots dt\) на множители \(\frac{1}{p}\), а самих переменных от времени \(x(t)\) и \(y(t)\) – на их частотные проекции \(X(p)\) и \(Y(p)\).
Такой переход от дифференциальных к алгебраическим уравнениям называется прямым преобразованием Лапласа, формулы преобразований - формулами прямого преобразования Лапласа, а полученное уравнение - операторным уравнением или уравнением в операторной форме.
Само преобразование Лапласа обозначается как
$$ L[x(t)] = X(p) $$При этом \(x(t)\) называют оригиналом, а \(X(p)\) - изображением. Для обратного перехода от операторного уравнения к функциям от времени используется метод обратного преобразования Лапласа. Общая формула обратного преобразования Лапласа:
$$ x(t) = L^{-1} [X(p)] = \frac{1}{2 \pi} \int_{- \inf}^{+\inf} X(p) e^{pt} dt $$Эта формула достаточно сложна и поэтому были разработаны специальные таблицы, в которые сведены наиболее часто встречающиеся изображения функций \(X(p)\) и их оригиналы \(x(t)\). Таким образом, описание линейных непрерывных систем может быть представлено через преобразование Лапласа в операторной форме, что позволяет нам уйти от временной неопределенности системы (+ есть "таблицы красных мячиков", так любимые инженерами из анекдотов).
Передаточная функция
Следующая возможность описания временных уравнений являются передаточные функции. Это своего рода математические модели систем регулирования, поскольку они полностью характеризуют динамические свойства систем.
Передаточной функцией называется отношение изображения выходного сигнала \(Y(p)\) к изображению входного воздействия \(X(p)\) при нулевых начальных условиях:
$$ W(p) = \frac{Y(p)}{X(p)} $$Разберем эту функцию подробнее. Допустим дифференциальная форма некой системы выглядит следующим образом
$$ a_0 \frac{d^n y}{dt^n} + a_{1} \frac{d^{n-1} y}{dt^{n-1}} + ... + a_n y = \\ = b_0 \frac{d^m u}{dt^m} + b_{1} \frac{d^{m-1} u}{dt^{m-1}} + ... + b_1 \frac{du}{dt} +b_m u \tag{3.1}\label{eq3.1} $$где \(u\) и \(y\) сигналы на входе и выходе системы соответственно.
Учтем, что
- Каждое дифференциальное уравнение можно представить в полиномиальной форме как мы разбирали ранее
$$ \begin{cases} a(s) &= a_0 s^n + a_1 s^{n-1} + a_2 s^{n-2} + ... + a_{n-1}s + a_n\\ b(s) &= b_0 s^m + b_1 s^{m-1} + b_2 s^{m-2} + ... + b_{m-1}s + b_m \end{cases} $$где \(b(s)\) и \(a(s)\) - полиномы, характерные для нашей системы (вход и выход соответственно).
- Вход задается уравнением \(u(t) = e^{st}\). Тогда и выход системы также будет функцией подобного вида (по условию система линейна): \(y(t) = y_0 e^{st}\).
Подставив все в уравнение \(\eqref{eq3.1}\) получим
$$(a_0 s^n + a_1 s^{n-1} + ... + a_n) y_0 e^{st} = (b_0 s^m + b_1 s^{m-1} + ... + b_m) e^{st}$$Если \(a(s) \neq 0\), то:
$$ \begin{equation}\begin{aligned} y(t) = y_0 e^{st} = \frac{b(s)}{a(s)} e^{st} = G(s) u(t) \end{aligned}\end{equation} \tag{3.2}\label{eq3.2} $$Где \(G(s)\) - передаточная функция системы (transfer function of the system), характеризующая отношения входного сигнала к выходному. \(m < n\) и \(n\) называется порядком системы (обычно 0, 1 или 2), а \(s\) - оператор передаточной функции (уравнение для сигнала).
Пример 3.1. Передаточная функция \(G(s) = 1 / s\) соответствует дифференциальному уравнению \(\frac{dy}{dt} = u\) и устройству - интегратору. В свою очередь \(G(s) = s\) соответствует \(y = \frac{du}{dt}\) - дифференциатору.
Пример 3.2. Передаточные функции временной задержки. Задержка по времени соответствует многим системам, для которых соотношение вход/выход равно:
$$y(t) = u(t - T)$$Предположим вход \(u(t) = e^{st}\), а выход: \(y(t) = y_0 e^{st}\), тогда:
$$y(t) = y_0 e^{st} = e^{s(t-T)} = e^{-sT} e^{st} = e^{-sT} u(t)$$Передаточная функция при временной задержке: \(G(s) = e^{-sT}\) - не рациональная функция.
Примечание. В выводе формул используется экспонента, поскольку такие сигналы играют значимую роль в линейных системах (например, импульсный ответ линейной системы). Большая часть сигналов может быть представлена в экспоненциальной форме или как линейная комбинация таких форм. Неизменный сигнал, будет выражаться как: \(e^{at}\) при \(a=0\). Затухающий синусоидальный и косинусоидальный сигнал: \(e^{(\sigma + i \omega)t} = e^{\sigma t} e^{i \omega t} = e^{\sigma t} (sin(\omega t) + i cos(\omega t))\).
Далее описаны некоторые примеры систем с их передаточными функциями.
3.3.2 Примеры систем и их передаточных функций
1. Потенциометр
Этот сенсор (рис. 3.5) не имеет элементов накопления энергии, а выходное напряжение может быть связано с входным сигналом (длина потенциометра) через уравнение:
$$ e_0(t) x_t = Ex_i(t) $$или
$$ \begin{equation}\begin{aligned} \frac{e_0(t)}{x_i(t)} = \frac{E}{x_t} = const = G(s) \end{aligned}\end{equation} \tag{3.3}\label{eq3.3} $$где \(x_t\) - общая длина потенциометра, \(E\) - действующее напряжение. Это система нулевого порядка.
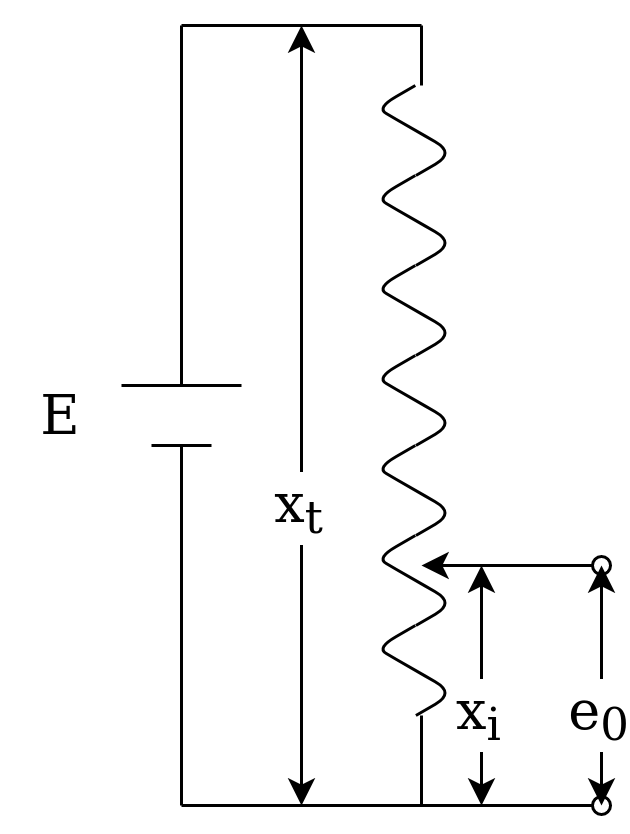
Рис. 3.7. Потенциометр. Задача. Подумайте, что обозначает \(s\) при работе с передаточными функциями и чему равно \(s\) в данном примере?
2. Термопара.
Обычная термопара (рис. 3.8) имеет горячий спай (рабочий конец) определенной массы (\(m\)).
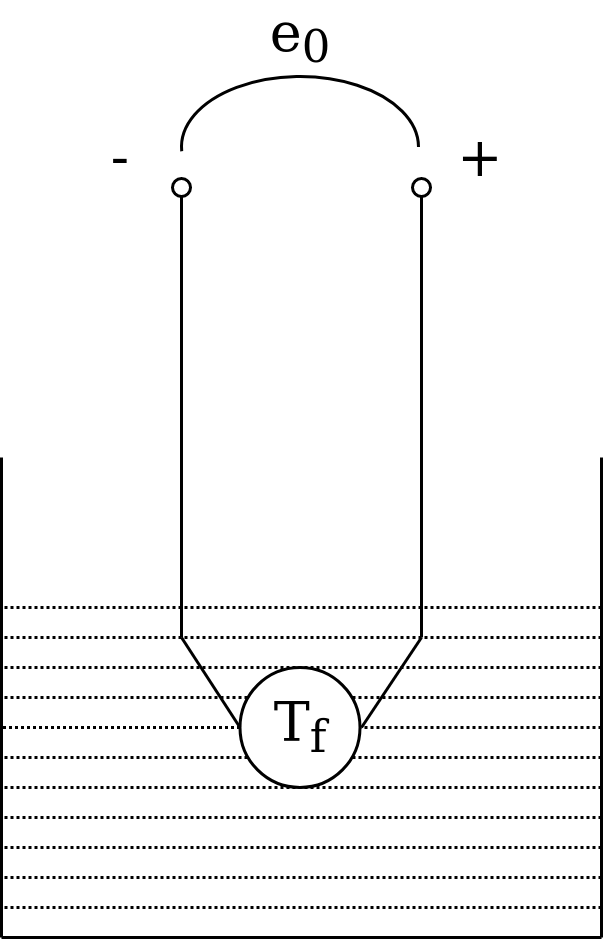
Рис. 3.8. Термопара. Если термопара погружена в жидкость при температуре \(T_f\), тогда ее динамические характеристики (связанные с выходным напряжением \(e_0\) и температурой на входе \(T_f\)) могут быть выражены следующей передаточной функцией:
$$ \begin{equation}\begin{aligned} \frac{e_0(t)}{T_f(t)} = \frac{K_v}{1+s \tau} = G(s) \end{aligned}\end{equation} \tag{3.4}\label{eq3.4} $$где
- \(K_v\) - установившаяся чувствительность для напряжения термопары, выраженная в \(В/^oC\).
- \(\tau\) - константа времени для термопары \(=\frac{mC}{hA}\) [с]
- \(m\) - масса горячего спая (рабочий конец) [кг]
- \(C\) - удельная теплоемкость [Дж/(кг·К)]
- \(h\) - коэффициент теплопередачи [Вт/(м2·К)]
- \(A\) - площадь поверхности горячего спая [м2].
Таким образом, обычная термопара является сенсором первого порядка (\(s=1\), линейная функция). Но если термопара помещена в металлический защитный кожух (как это обычно делается в промышленности), то порядок системы увеличивается за счет дополнительного энергоаккумулирующего элемента (тепловой массы кожуха), и она становится системой второго порядка (\(s=2\), квадратичная функция).
3. Датчики вибрации
Сейсмические датчики (seismic sensor, рис. 3.9) обычно используются для измерений вибраций и ускорения.
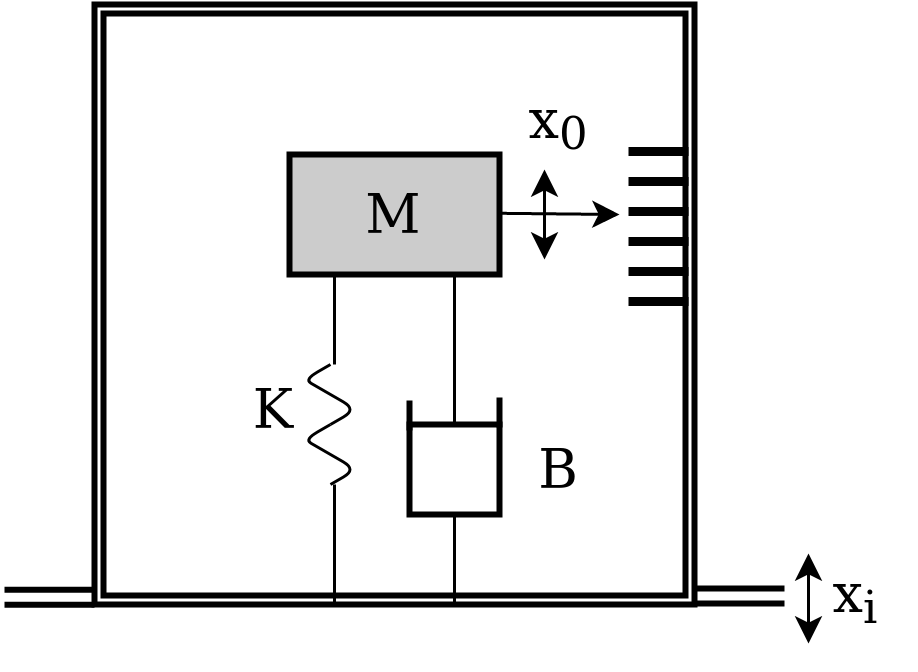
Рис. 3.9. Датчик вибрации. Передаточная функция (связь) между входящим смещением \(x_i\) и выходящим смещением \(x_0\) выражается как
$$ \begin{equation}\begin{aligned} \frac{x_0(t)}{x_i(t)} = \frac{Ms^2}{Ms^2 + Bs + K} = G(s) \end{aligned}\end{equation} \tag{3.5}\label{eq3.5} $$где
- \(M\) - масса вибрирующего тела [г]
- \(B\) - константа затухания
- \(K\) - постоянная пружины.
Таким образом датчик вибрации является системой второго порядка.
3.3.3 Некоторые характеристики устройств с переменным сигналом
Как известно переходные и динамические процессы возможны только при каких-либо изменяющихся входных воздействиях. Только тогда происходит изменение внутренних параметров системы во времени (это и характеризует динамические свойства системы) с использованием переходных характеристик. Такие характеристики могут записываться аналитически или изображаться графически в виде кривой \(y(t)\) (рис. 3.10).
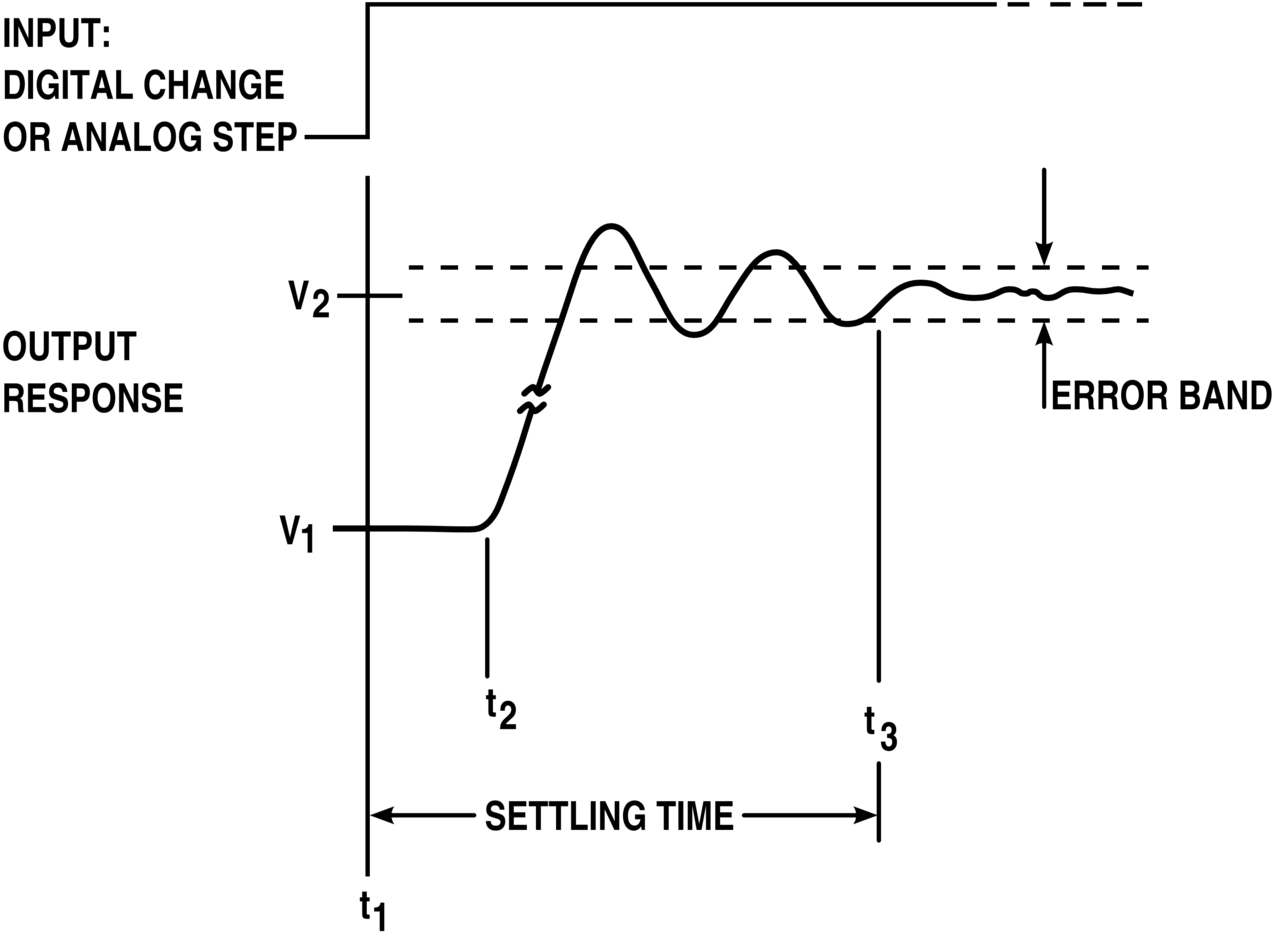
Рис. 3.10. Графический пример переходных характеристик (https://en.wikipedia.org/wiki/Step_response). Нужно понимать, что переходные и динамические процессы системы будут зависеть от входных воздействий. Обычно, для простоты анализа, входные воздействия приводят к одному из типовых видов (рис. 3.11).
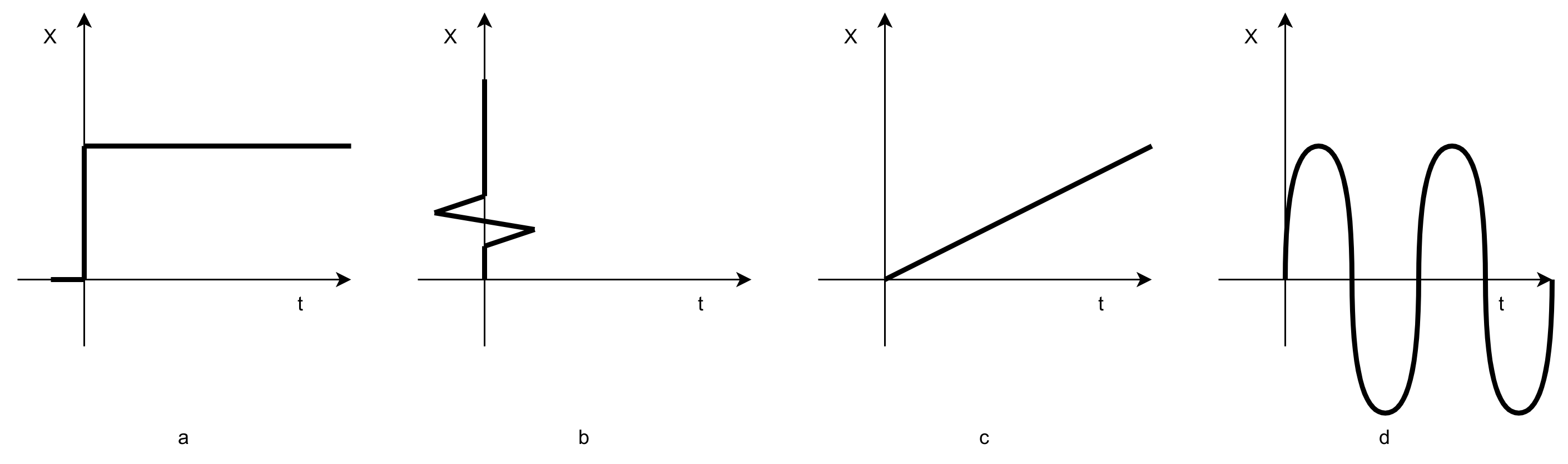
Рис. 3.11. Основные входные воздействия: a - единичное ступенчатое, b - импульсное (дельта-функция), c - линейное, d - синусоидальное (гармоническое).
- Единичная ступенчатая функция (функция Хэвисайда, единичная ступенчатая функция, функция единичного скачка, включенная единица) – кусочно-постоянная функция, равная нулю для отрицательных значений аргумента и единице – для положительных.
- Дельта-функция (\(\delta\)-функция Дирака, дельта-импульс) – применяется в математической физике при решении задач, в которые входят сосредоточенные величины: сосредоточенная нагрузка, сосредоточенный заряд и т.д. Физически \(\delta\)-функцию можно представить как бесконечный всплеск единичной интенсивности.
- Линейная функция - соответствует линейно возрастающему входному сигналу.
- Синусоидальная (гармоническая) функция - соответствует гармоническим колебаниям входного сигнала.
Более подробно о математике, лежащей за данными функциями можно прочитать на хабре. Ниже приводятся некоторые важные характеристики переходных динамических систем с кратким описанием.
1. Переходная характеристика (степень реагирования на единичное воздействие как на рис. 3.9 a, step response performance)
Реакция системы на единичное ступенчатое воздействие при нулевых начальных условиях (\(х(0) = 0\) и \(у(0) = 0\)). Нормализованная переходная функция системы обычно описывается как показано на рис. 3.12.
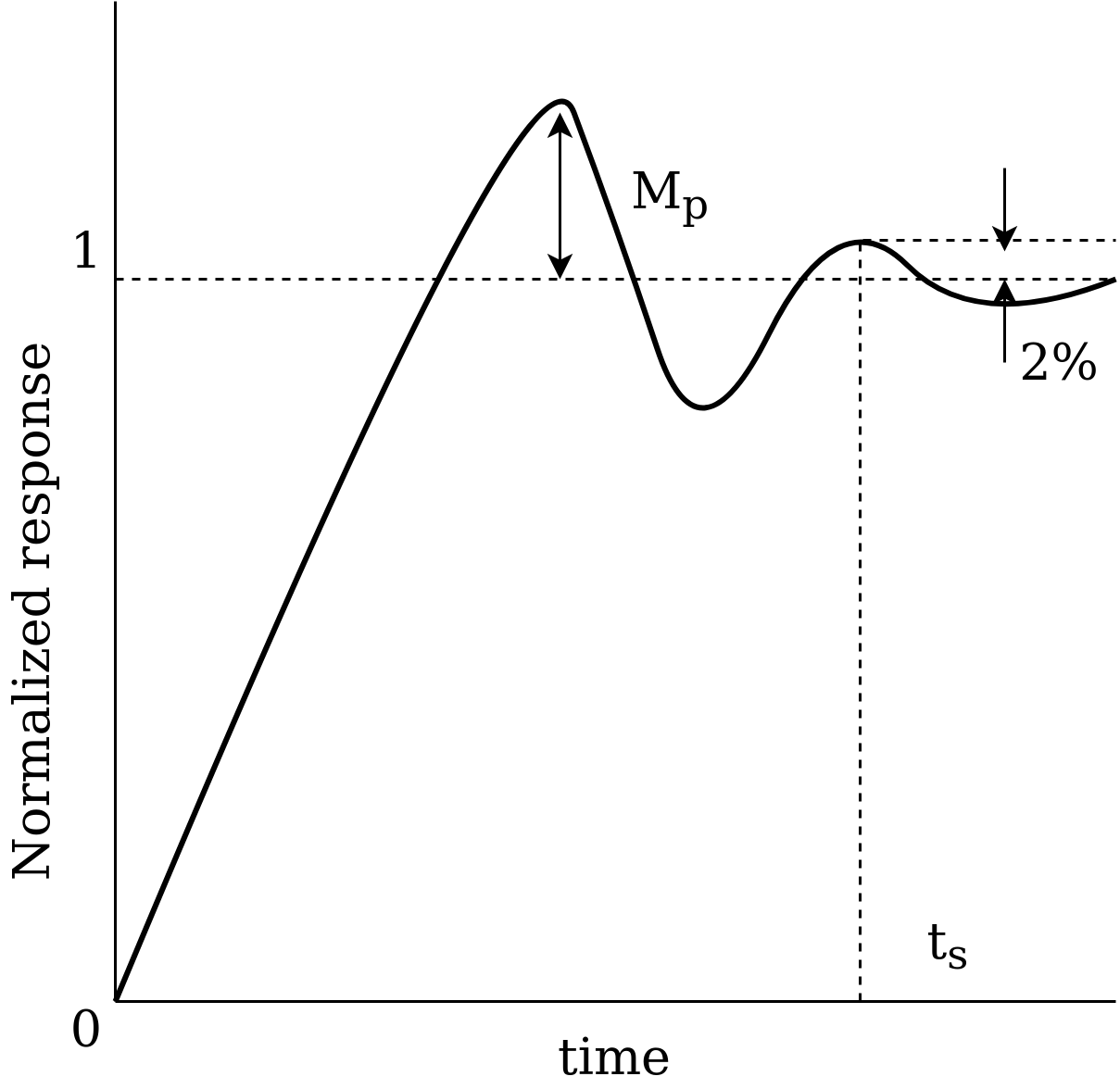
Рис. 3.12. Переходная функция динамической системы при ступенчатом воздействии (3.9 a). Для описания такой системы используют следующие параметры динамического ответа (реагирования):
- перерегулирование (peak overshoot, \(M_p\)) - разница между максимальным значением и значением покоя, обычно выражается в процентах;
- время регулирования (время переходного процесса, setting time, \(t_s\)) - это время, необходимое для достижения ответа в пределах \(\pm 2\) % от значения в устойчивом состоянии;
- время нарастания (rise time, \(t_r\)) - интервал времени, за которое переходная характеристика (response) увеличивается с 10 до 90%
Задача. Найдите время нарастания на графике 3.10.
2. Амплитудно-частотная характеристика (frequency response perfomance)
Отражает зависимость амплитуды ответного сигнала системы от частоты ее входного сигнала (рис. 3.11).
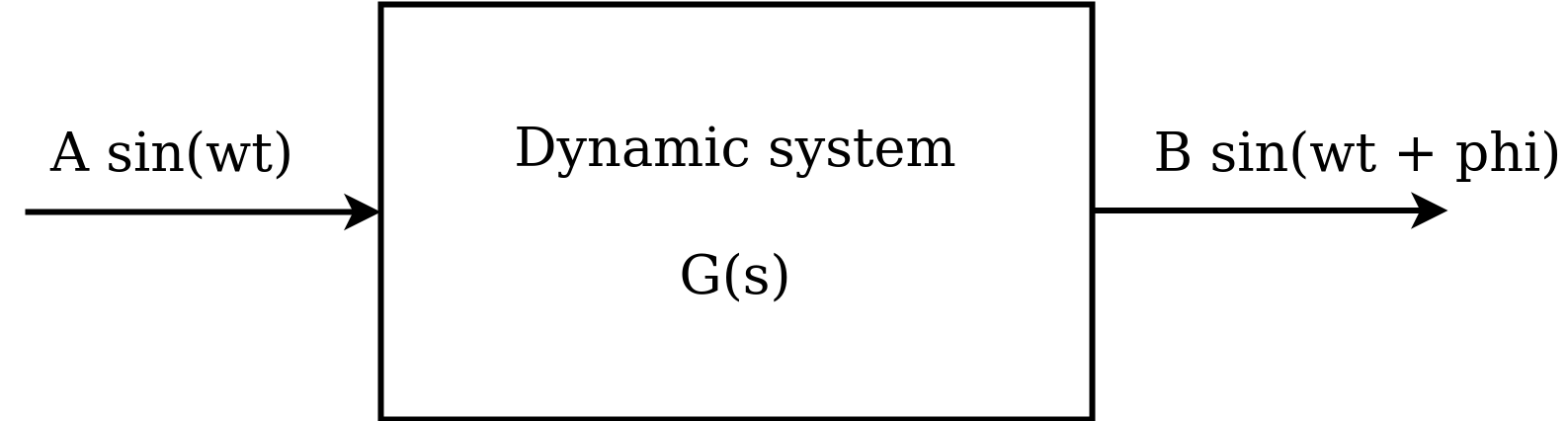
Рис. 3.13. Частотный ответ Предположим \(G(s)\) это передаточная функция динамической системы, выраженная общим уравнением \(\eqref{eq3.2}\). Если входящий сигнал является синусом с амплитудой \(А\) и частотой \(\omega\), тогда в равновесном состоянии, выходом будет также синус с такой же частотой, но другой амплитудой \(B\) и будет фазовая разница между входом и выходом. Может быть доказано, что отношение амплитуд и фазовая разница будут выражены следующем образом:
$$\frac{B}{A} = |G(j\omega)|$$и
$$\phi = \angle G(l\omega)$$Графики, показывающие вариации амплитудных отношений и фазового угла от частоты, называются графиками амплитудно-частотной характеристики. Типичная амплитудно-частотная характеристика пьезоэлектрического акселерометра показаны на рис.3.12.
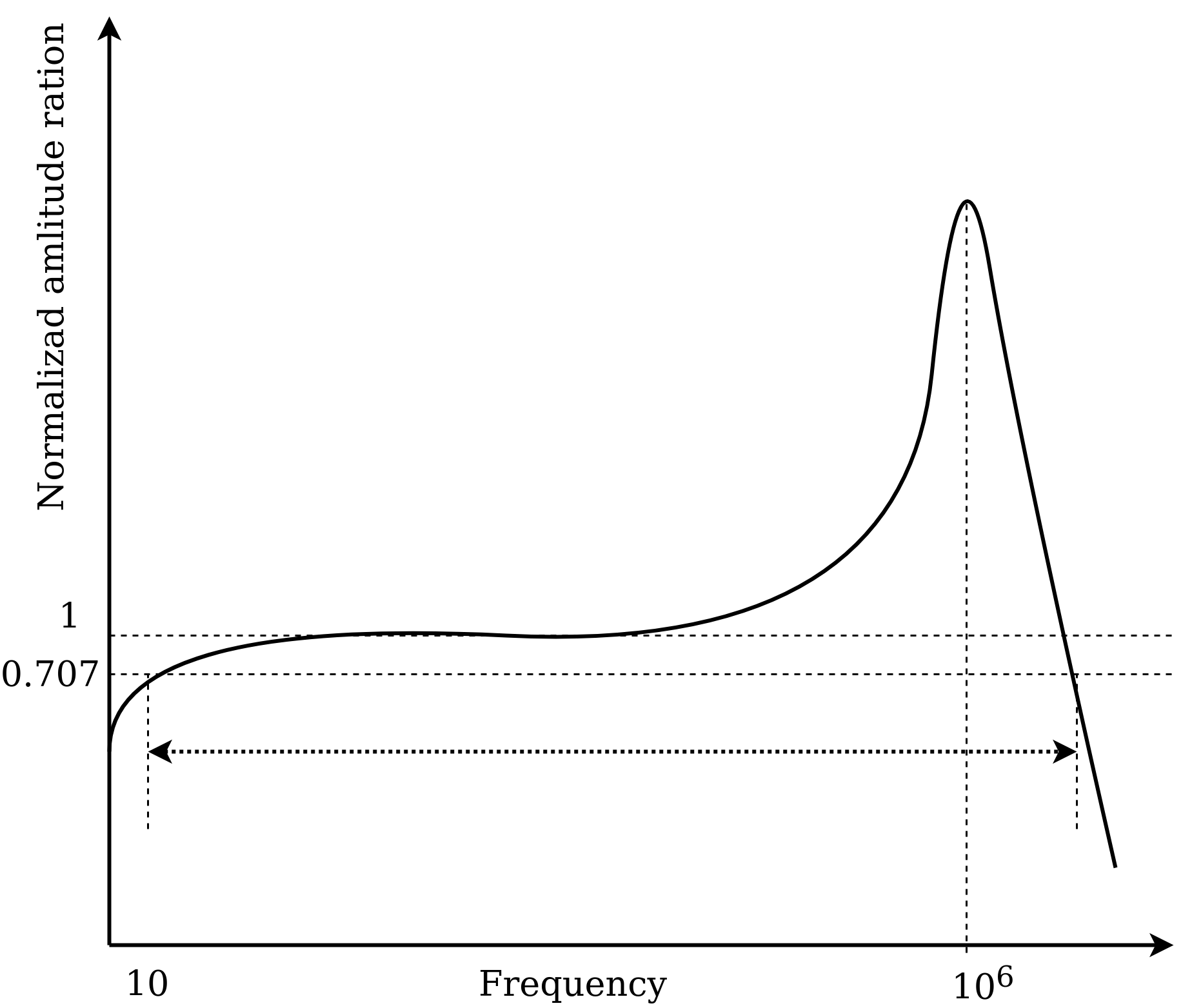
Рис. 3.14. Характеристики амплитуды в зависимости от частоты для пьезоэлектрического акселерометра. 3. Полоса пропускания и естественная частота (brandwidth and natural frequency)
Из рис. 3.12 следует, что амплитуда является константой для широкого диапазона частот. Этот диапазон называется шириной пропускания (bandwidth) измеряемой системы (если быть точным, это частотный диапазон в котором нормализованное амплитудное отношение не опускается ниже уровня 0.707 отн. ед. или -3 дБ). Устройства могут использоваться именно в данном диапазоне. Нижний и верхний лимиты называются "нижний и верхний срез (край, cut)" частот. Частота, при которой амплитудное отношение достигает пика, называется естественной (затухающей) частотой системы (damped, natural frequency).
3.4 Погрешности
Данный раздел посвящён очень важно и очень "странной" вещи - статистике и погрешностям измерений. Явлениям этой природы и частичному обзору статистики для исследований и измерений посвящен отдельный курс моей преподавательской деятельности "Планирование эксперимента и анализ данных". Для хорошего понимания, что такое анализ данных, статистика и обработка результатов измерений - прошу ознакомиться. Далее же приводятся только некоторые тезисы и основные понятия, минимально необходимые для настоящего курса.
В практике любых измерений можно заметить, что если проводить повторные измерения в зафиксированных условиях, то результаты будут отличаться друг от друга. Часто это вызвано какими-либо внутренними источниками погрешности, которые изменяются случайным образом в случайный момент времени и сложны для предсказания. Для примера, характеристики диодов и элементов сопротивления (резисторов) на электронной схеме являются случайными, в зависимости от источника шумов (помех): температурного и наводящегося электрического или магнитного шума.
Таким образом, для описания результатов повторяющихся измерений с целью установления истинного значения необходимо использовать аппарат статистики. Наиболее распространенными понятиями в нем являются среднее и стандартное отклонение. Среднее серии измерении (показаний, \(\overline{x}\)), является наиболее точным приближением истинного значения. С другой стороны, стандартное отклонение (\(\sigma\)) является мерой разброса данных относительно среднего. При нормальном распределении величины и в случае правильных условий измерений (когда погрешности будет действительно случайной), 68 % измерений будут находиться в интервале \(\pm \sigma\) от среднего. Обычно, чем меньше значение \(\sigma\), тем более повторяемыми и точными будут измерения). Предел неопределенности исмерений обычно устанавливается равным \(\pm 3\sigma\), это соответствует 99% доверительному интервалу (столько случайных измерений нашей величины должно оказаться в данном интервале). Диапазон неопределенности зачастую называют доверительным интервалом.
Примечание. Статистика и понимание природы ошибок - чрезвычайно важное знание. Особенно это важно при доказании своей правоты и проверки сделанных предположений. Например, отличаются ли 2 метода статистически значимо. Или видимое различие лишь случайно...
Для грамотной работы с измерительными устройствами и сенсорами необходимо уметь:
- определять тип ошибки;
- определять среднее, дисперсию и средне-квадратичное отклонение;
- понимать лимитирующую ошибку устройства;
- строить зависимость методом наименьших квадратов;
- различать калибровку по 1 и 2 точкам.
В принципе, основной нашей задачей является получение данных о системе - измерение. Однако мы никогда не можем измерить истинное значение какой-либо физической величины, поскольку все относительно в этом мире и погрешности накапливаются. Да и из-за случайных факторов всегда есть вероятность ошибки. В наших силах лишь набрать массив измерений, посчитать статистики и сделать предположение об истинности полученных результатов. Для более вероятного получения наиболее близких к истине результатов используют калибровки и сравнения со стандартами.
3.4.1 Анализ ошибок
В общем случае ошибка измерения выражается как
$$ \begin{equation}\begin{aligned} \text{Error} = \text{Instrument reading} - \text{True reading} \end{aligned}\end{equation} \tag{3.6}\label{eq3.6} $$Часто, ошибка выражается в процентах как:
$$ \begin{equation}\begin{aligned} \text{% Error} = \frac{\text{Instrument reding} - \text{True reading}}{\text{True reading}} \times 100 \end{aligned}\end{equation} \tag{3.7}\label{eq3.7} $$Ошибки (погрешности) устройства могут быть 3 категорий:
- Промахи (gross) - из-за человеческого фактора (считывание показание до достижения стабильности, ошибка записи, ошибка расчета и т.д.);
- Систематические - те, которые влияют на все значения в одинаковой мере (ошибка установки 0, дрейф сигнала со временем), может быть исправлена калибровкой;
- Случайные - ошибки статистической (т.е. неизвестной исследователю) природы, которые случайным образом оказывают влияние, не может быть исправлена, может быть только уменьшена и статистически учтена.
3.4.2 Систематические ошибки
Систематические ошибки могут возникать по разным причинам. Это может быть связано с неисправностями прибора или датчика. Прибор может иметь "ошибку нуля" (когда приборный ноль не соответствует истинному), или его выход может изменяться нелинейно со входом (отклоняясь от идеального линейного соотношения "вход/выход"). Кроме того, усилитель внутри прибора может иметь входное смещение по напряжению и току, что будет способствовать появлению ошибке нуля. Различные нелинейности в цепи усилителя также приведут к ошибке из-за нелинейности. Также систематическая погрешность может быть вызвана неправильной конструкцией измерительной схемы. Погрешность может возникать из-за эффекта нагрузки, неправильного выбора датчика или частоты отсечения фильтра. Систематические ошибки могут быть также вызваны эффектом окружающей среды (характеристики датчика могут изменяться с изменением температуры или других условий окружающей среды).
Главной особенностью систематических погрешностей является то, что источники погрешностей распознаются и могут быть в значительной степени уменьшены путем тщательного проектирования измерительной системы и выбора ее компонентов (или просто введением поправок). Помещение прибора в контролируемую среду может также помочь в уменьшении систематических ошибок. Они могут быть еще больше уменьшены путем правильной и регулярной калибровки прибора.
3.4.3 Случайные ошибки
В отличие от систематических погрешностей, случайные не имеют какой-либо известной природы и не могут быть устранены (они появляются из-за общей неопределенности, как-бы это не звучало). Такие ошибки могут быть только уменьшены с использованием законов статистики. Такие ошибки не смешенные (т.е. случайным образом распределены вокруг какого-то среднего значения как в большую, так и в меньшую сторону). Но к счастью, обычно такие ошибки следуют нормальному закону распределения и их величину можно уменьшить набором большего количества измерений и усреднением.
Основные понятия случайных величин перечислены ниже.
Среднее (Mean):
$$ \begin{equation}\begin{aligned} \overline{x} = \frac{1}{n} \sum_{i=1}^{n}x_i \end{aligned}\end{equation} \tag{3.8}\label{eq3.8} $$где \(n\) - общее число измерений и \(x_i\) - значение единичного измерения.
Может быть показано, что средняя величина является наиболее вероятным значением для данной выборки, именно по этому среднее - одна из важнейших величин в статистическом анализе.
Отклонение (Deviation):
$$ \begin{equation}\begin{aligned} d_i = x_i - \overline{x} \end{aligned}\end{equation} \tag{3.9}\label{eq3.9} $$Данная величина показывает насколько сильно единичные измерения отклоняются от среднего. К сожалению, усреднение данной величины не сможет предсказать как сильно может отклониться следующее измерение от среднего:
Среднее значение отклонений (Mean of deviation):
$$ \frac{1}{n} \sum_{i=1}^{n} (x_i - \overline{x}) = \overline{x} - \frac{1}{n}(n \overline{x}) = 0 $$Важная величина - используется что бы оценить насколько все значения в некотором диапазоне отклоняются от истинных. Кроме того нужна для аппроксимации набора значений методом наименьших квадратов (МНК).
Дисперсия (Variance):
$$ \begin{equation}\begin{aligned} V = \frac{1}{n-1} \sum_{i=1}^{n} (x_i - \overline{x})^2 = \sigma^2 \end{aligned}\end{equation} \tag{3.10}\label{eq3.10} $$Интересно, что усреднение для дисперсии ведется по \(n-1\) величине. Это называется количеством степеней свободы, поскольку при единичном измерении оно никуда не отклониться (само от себя). Однако, для больших выборок (\(n>30\)), можно аппроксимировать дисперсию как:
$$ \begin{equation}\begin{aligned} V = \frac{1}{n} \sum_{i=1}^{n} (x_i - \overline{x})^2 = \sigma^2 \end{aligned}\end{equation} \tag{3.11}\label{eq3.11} $$3.4.4 Распространение ошибки
Довольно часто искомая величина зависит от нескольких измеряемых значений (например расчет мощности источника постоянного тока по напряжению и току). Как тогда расчитать погрешность, если неопределенность измеряемых величин известна?
Допустим \(y = f(x_1, x_2, ..., x_n)\). Если неопределенность (или отклонение) для \(x_i\) известна и равна \(\Delta x_i\), (i = 1, 2,.. n), то расчитаем неопределенность для \(y\).
Для этого продифференцируем выражение и разложим его в ряд Тейлора:
$$ \begin{equation}\begin{aligned} \Delta y = \frac{\delta f}{\delta x_1} \Delta x_1 + \frac{\delta f}{\delta x_2} \Delta x_2 + ... + \frac{\delta f}{\delta x_n} \Delta x_n \end{aligned}\end{equation} \tag{3.12}\label{eq3.12} $$Поскольку \(\Delta x_i\) может быть как положительной, так и отрицательной, то максимальная погрешность достигается обыкновенным сложением абсолютных отклонений:
$$ |\Delta y| = \frac{\delta f}{\delta x_1} |\Delta x_1| + \frac{\delta f}{\delta x_2} |\Delta x_2| + ... + \frac{\delta f}{\delta x_n} |\Delta x_n| $$Однако, это крайне маловероятное событие. На практике, \(x_1, x_2 ,..., x_n\) являются независимыми величинами и все ошибки не проявляются в максимальной форме единовременно. Тогда, перейдя к средне квадратинчому отклонению из уравнения \(\eqref{eq3.12}\) получим:
$$ \begin{equation}\begin{aligned} (\Delta y)^2 = (\frac{\delta f}{\delta x_1})^2 (\Delta x_1)^2 + (\frac{\delta f}{\delta x_2})^2 (\Delta x_2)^2 + ... + 2\frac{\delta f}{\delta x_1}\frac{\delta f}{\delta x_2} (\Delta x_1)(\Delta x_2) + ... \end{aligned}\end{equation} \tag{3.13}\label{eq3.13} $$Если вариации \(x_1, x_2, ...\) независимы, то положительное значение одного приращения с одинаковой вероятностью будет связано с отрицательным значением другого приращения, так что некоторые из величин могут быть приняты как ноль (все слагаемые с отличной от 2-ой степенью) для совокупности повторных наблюдений.
Мы уже определили дисперсию \(V\) как ошибку среднего квадрата. Таким образом, среднее \((\Delta y)^2\) для набора повторных наблюдений, становится дисперсией \(y\), или
$$ \begin{equation}\begin{aligned} (\Delta y)^2 = V(y) = (\frac{\delta f}{\delta x_1})^2 V(x_1) + (\frac{\delta f}{\delta x_2})^2 V(x_2) + ... \end{aligned}\end{equation} \tag{3.14}\label{eq3.14} $$Тогда стандартное отклонение \(y\):
$$ \sigma (y) = [(\frac{\delta f}{\delta x_1})^2 \sigma^2 (x_1) + (\frac{\delta f}{\delta x_2})^2 \sigma^2 (x_2) + ... ]^{\frac{1}{2}} $$3.4.5 Ограничивающая ошибка (Limiting Error)
Ограничивающая погрешность является важным параметром, который используется для определения точности устройств. Ограничительная погрешность (или гарантированная погрешность) указывается изготовителем для определения максимального предела погрешности прибора.
Предположим, что точность вольтметра 0-100 В указана как 2% от полного диапазона шкалы. Это означает, что погрешность гарантированно будет в пределах \(\pm 2V\) при любом показании. Если вольтметр считывает 50 В, то ошибка также находится в пределах \(\pm 2V\). В результате, точность этого показания будет равна \(\frac{20}{50} \times 100 = 4%\). Если общая производительность измерительной системы зависит от точности нескольких независимых параметров, то предельная или гарантийная погрешность определяется абсолютной погрешностью, как указано в выражении в \(\eqref{eq3.13}\).
Например, если мы измеряем значение неизвестного элемента сопротивления с помощью моста wheatstone, чьи резисторы имеют заданную погрешность в 1%, 2% и 3% соответственно, то, поскольку
$$ R_x = \frac{R_1 R_2}{R_3} $$$$ \Delta R_x = \frac{R_2}{R_3} \Delta R_1 + \frac{R_1}{R_3} \Delta R_2 - \frac{R_1 R_2}{R_3^2} \Delta R_3 $$или
$$ \frac{\Delta R_x}{R_x} = \frac{\Delta R_1}{R_1} + \frac{\Delta R_2}{R_2} - \frac{\Delta R_3}{R3} $$Тогда по логике \(\eqref{eq3.13}\) абсолютная ошибка расчитывается с использованием только положительных значений, и ограничительная погрешность составит 6%.
3.4.6 Значимость арифметического среднего
Несмотря на распространенность такой процедуры как взятие арифметического среднего, давайте постараемся разобраться почему это так важно. А связано это с нем, что арифметическое среднее - это наиболее вероятное значение для выборки:
Допустим \(x_1, x_2, ..., x_n\) - выборка из \(n\) наблюдений. Пусть \(X\) - центральное значение (пока не уточняем какое).
Тогда отклонения от центрального значения будут равны \((x_1 − X), (x_2 − X), ..., (x_n − X)\) соответственно.
Сумма квадратов отклонений: \(S_{sq} = (x_1 − X)^2 + (x_2 − X)^2 + ... + (x_n − X)^2 = x_1^2 + x_2^2 + ... + x_n^2 - 2X(x_1 + x_2 + ... + x_n) + nX^2\)
Найдем среднее \(X\) при минимальных квадратах отклонений:
$$ \frac{dS_{sq}}{dX} = -2(x_1 + x_2 + ... + x_n) + 2nX = 0 $$или
$$ X = \frac{1}{n}(x_1 + x_2 + ... + x_n) = \overline{x} $$Таким образом арифметическое среднее - это центральное значение с точки зрения квадратов отклонений.
Стоит учитывать, что взяв другой набор измерений мы получим другое среднее (опять влияние наших любимых случайных погрешностей). Однако при очень большом количестве измерений мы приблизимся очень близко к истинному значению (математическое ожидание). Тогда возникает закономерный вопрос - как определить отклонение различных наборов средних значений от истинной величины?
3.4.7 Стандартное отклонение среднего
Предположим, имеется набор измерений \(x_1, x_2, x_3, ..., x_n\). Тогда среднее, как мы выяснили ранее будет равно:
$$ \overline{x} = \frac{1}{n} (x_1 + x_2 + ... + x_n) = f(x_1 + x_2 + ... + x_n) $$Используя выражение для дисперсии \(\eqref{eq3.14}\) получим:
$$ V(y) = (\frac{\delta f}{\delta x_1})^2 V(x_1) + (\frac{\delta f}{\delta x_2})^2 V(x_2) + ... = \frac{1}{n^2} (V(x_1) + V(x_2) + ... + V(x_n)) $$Тогда стандартное отклонение для измерений \(x_1, x_2, x_3, ..., x_n\):
$$ \sigma = [\frac{1}{n}(V(x_1) + V(x_2) + ... + V(x_n))]^{\frac{1}{2}} $$где \(n\) - велико.
Таким образом,
$$ V(\overline{x}) = \frac{1}{n^2} (n \sigma^2) = \frac{\sigma^2}{n} $$$$ \sigma(\overline{x}) = \frac{\sigma}{\sqrt{n}} $$Вот мы и определили отклонение средних от истинного среднего. Полученная закономерность говорит о том, что воспроизводимость может быть улучшена (а \(\sigma (x)\) уменьшена) за счет увеличения числа наблюдений. Но улучшение будет медленным из-за \(\sqrt{n}\).
Пример. Предположим, что сенсор имеет случайную ошибку со стандартным отклонением 1%. Сколько измерений нужно сделать и усреднить, для того, чтобы уменьшить стандартное отклонение от истинного среднего до \( < 0.1%\)?
Решение: \(\frac{\sigma}{\sqrt{n}} < 0.1; \sqrt{n} > \frac{1}{0.1} = 10\); или \(n > 100\).
3.4.8 Метод наименьших квадратов
Пожалуй это один из самых распространенных методов аппроксимации данных и о нем нужно хотя бы один раз услышать. В нашем случае рассмотрим данный метод для построения аппроксимирующей прямой. Это часто необходимо, когда по экспериментальным данным нужно предположить какую-либо зависимость (например, сопротивление от температуры и т.д.). Для этого необходимо найти такой полином, среднеквадратичное отклонение от которого до экспериментальных данных будет минимальным - это и есть МНК (метод наименьших квадратов, рис. 3.15)
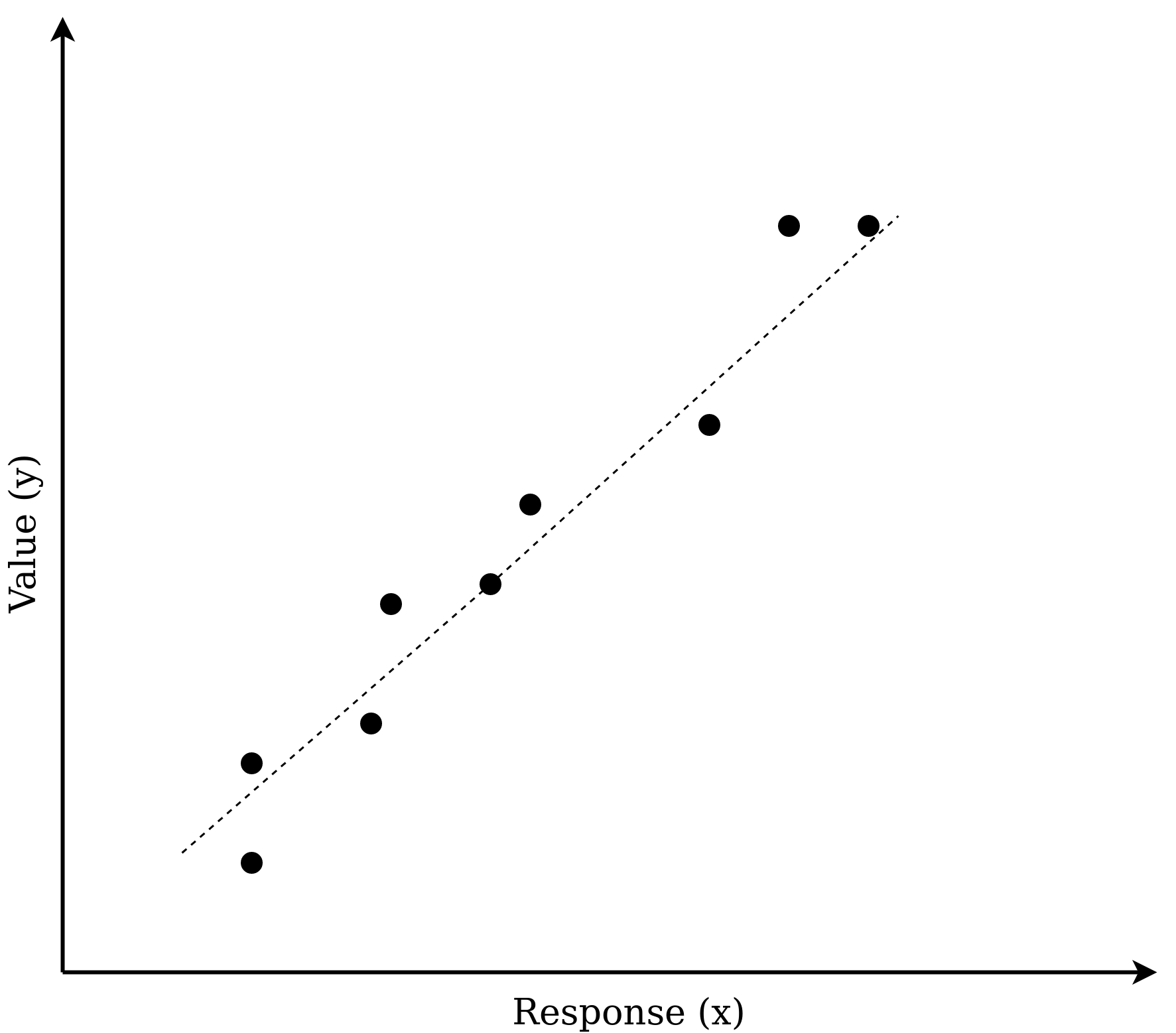
Рис. 3.15. Метод наименьших квадратов. Предположим, у нас имеется \(n\) экспериментальных данных: \((x_1, y_1), (x_2, y_2), ..., (x_n, y_n)\). Мы хотим найти зависимость вида \(y = a_0 + a_1 x\) при которой общий квадрат ошибки будет минимальным. Неизвестными являются \(a_0\) и \(a_1\). При этом ошибка для i-ого измерения:
$$ e_i = y_i - y = y_i - a_0 - a_1 x_i $$А общая квадратичная ошибка:
$$ S_e = \sum_{i=1}^{n} e_i^2 = \sum_{i=1}{n} (y_i - a_0 - a_1 x_i)^2 $$Для минимизации необходимо минимизировать эти ошибки: \(\frac{\delta S_e}{\delta a_0} = 0\) и \(\frac{\delta S_e}{\delta a_1} = 0\)
или
$$ \begin{equation}\begin{aligned} \frac{\delta S_e}{\delta a_0} = -2 \sum_{i=1}^{n} (y_i - a_0 - a_1 x_i) = 0 \end{aligned}\end{equation} \tag{3.15}\label{eq3.15} $$и
$$ \begin{equation}\begin{aligned} \frac{\delta S_e}{\delta a_1} = -2 \sum_{i=1}{n} x_i (y_i - a_0 - a_1 x_i) = 0 \end{aligned}\end{equation} \tag{3.16}\label{eq3.16} $$Из \(\eqref{eq3.15}\) и \(\eqref{eq3.16}\) получим
$$ \sum_{i=1}^{n} y_i - a_0 n - a_1 \sum_{i=1}^{n} x_i = 0 $$$$ \sum_{i=1}^{n} x_i y_i - a_0 \sum_{i=1}^{n} x_i - a_1 \sum_{i=1}^{n} x_i^2 = 0 $$Решая данную систему получим:
$$ a_1 = \frac{n \sum_{i=1}^{n} x_i y_i - \sum_{i=1}^{n} x_i \sum_{i=1}^{n} y_i}{n \sum_{i=1}^{n} x_i^2 - (\sum_{i=1}^{n} x_i)^2} $$или
$$ a_1 = \frac{\frac{1}{n} \sum_{i=1}^{n} x_i y_i - \overline{x} \overline{y}}{\frac{1}{n} \sum_{i=1}^{n} x_i^2 - \overline{x}^2} $$где \(\overline{x}\) и \(\overline{y}\) - средние значения экспериментальных данных \(x_i\) и \(y_i\) соответственно.
Тогда:
$$ a_0 = \overline{y} - a_1 \overline{x} $$Задача. Считая, что зависимость между переменными x и y имеет вид \(y = ax^2 + bx + c\), найти оценки параметров \(a\), \(b\) и \(c\) методом наименьших квадратов по выборке:
x 7 31 61 99 129 178 209 y 13 10 9 10 12 20 26 3.4.9 Калибровка и устранение погрешности
Уже упоминалось, случайные ошибки не могут быть устранены. Но, взяв ряд показаний при одном и том же условии и рассчитав их среднее, можно значительно сократить разброс случайных ошибок. На самом деле, если количество показаний очень велико, то среднее значение приблизится к истинному, и так ошибка может быть минимизирована. В другом случае - можно использовать статистический подход и оценить диапазон погрешности измерения.
С другой стороны, для систематической погрешности можно выявить ее источник (идентифицировать) и устранить его. Однако даже для простого устройства систематические ошибки могут возникать по целому ряду причин. А выявление и устранение всех источников ошибки может оказаться весьма утомительным процессом. Привлекательной альтернативой является калибровка прибора под различные известные входы.
Калибровка (calibration) - это процесс, в котором известный входной сигнал или ряд входных сигналов применяются к системе с целью выявить значение систематической погрешности для его математического устранения в расчетах. Сравнивая фактическое входное значение со значением выхода, можно наблюдать общий эффект от систематических ошибок. Затем в точках калибровки найденные ошибки обнуляются с помощью калибровочных диаграмм или с помощью расчитанных коэффициентов.
Строго говоря, калибровка подразумевает сравнение измеренной величины со стандартной (полученной в результате сравнения с эталонами). Однако в реальной калибровочной системе нам зачастую требуется не только стандартный прибор (например, для измерения давления), но и особый испытательный стенд (где желаемое давление может быть сгенерировано при различных условиях). В некоторых случаях процесс калибровки устройства еще более сложный. Например, в случае измерения ускорения, поскольку желаемое ускорение должно быть получено на конкретном объекте, то и измерительное устройство должно быть смонтировано на нем же. А фактическое значение полученного ускорения должно измеряться каким-то другим, косвенным образом.
Есть разные подходы для осуществления калибровки. Она может быть выполнена для всех точек с составлением обзорной таблицы (look-up table), по которой затем получают показание для каждого фактического измерения. Такой тип калибровки часто называют калибровкой с помощью программного обеспечения (software calibration). Однако более популярным способом является калибровка прибора в одной, двух или трех точках измерения и подгонка показаний прибора так, чтобы погрешность в этих точках была равна нулю. В этом случае ожидается, что погрешность для всего диапазона измерения уменьшиться и останется в пределах малого интервала (не забываем - основное наше предположение для сенсоров - что мы работаем в линейном диапазоне). Такие калибровки известны как калибровка в одной точке, в двух точках и в трех точках соответственно. Типичные характеристики входа-выхода измерительного устройства при этих трех калибровках показаны на рис. 3.16.
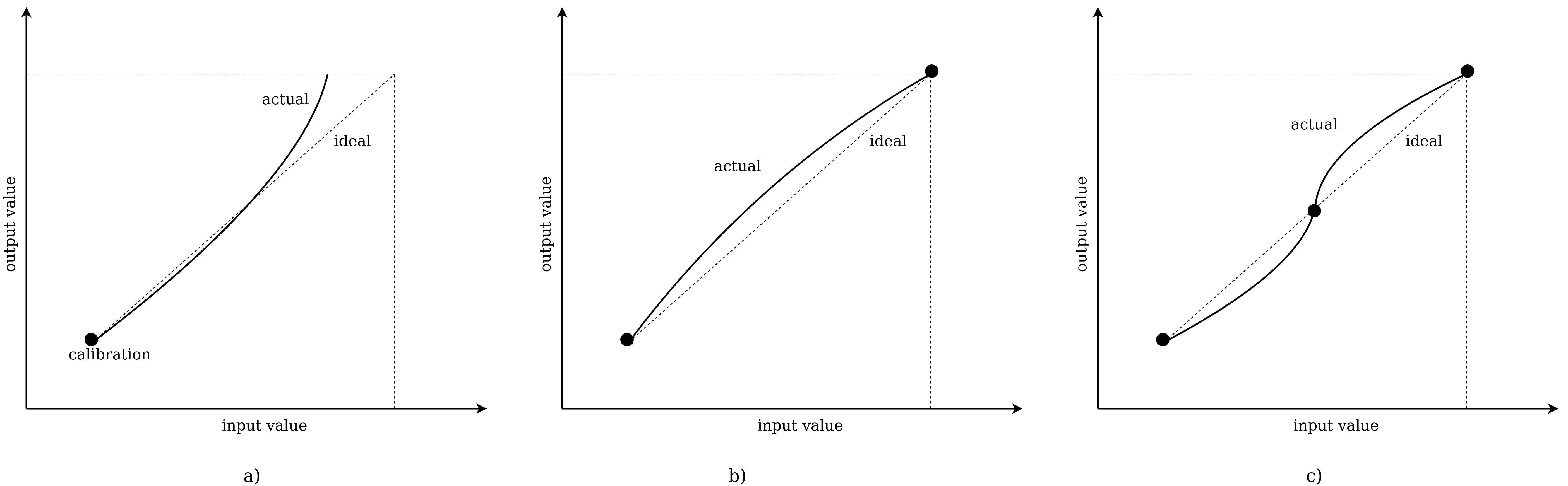
Рис. 3.16. Калибровка a) - по одной точке, b) - по двум точкам, c) - по трем точкам. Калибровку по одной точке часто называют регулировкой смещения (offset adjustment), при котором отклонение в одной точке для системы должно быть нулевым (часто такая калибровка делается при 0 входе, т.е. сенсор калибруется по холостой пробе). Для электронных приборов часто это делается автоматически, а сам процесс называется автоматическая калибровка нуля (auto-zero). В большинстве же случаев, калибровка выполняется в двух точках: одна - 0 на входе, другая - в максимуме шкалы. Другое название подобной калибровки - корректировки нуля и диапазона (zero and span adjustment).
Необходимо упомянуть один важный момент - характеристики прибора со временем меняются. Поэтому даже при хорошей калибровке систематическая погрешность может опять появиться со временем (как правило, за счет изменения окружающих условия, таких как температура, место размещения и т.п.). Поэтому процесс калибровки должен повторяться через определенные промежутки времени регулярно.
3.4.1. Заключение по разделу 3.4
Погрешности и калибровка являются двумя основными проблемами при любых измерениях. Фактически, знания об измерениях остаются неполными без какого-либо всеобъемлющего представления об этих двух явлениях и в настоящий главе приведен только их краткий обзор. Были определены и объяснены термины "ошибка", "предельная ошибка" и классифицированы различные типы ошибок. Мы также обсудили и метод наименьших квадратов для построения прямых линий (аппроксимация). Тем не менее я крайне рекомендую ознакомиться с курсом "Планирование эксперимента и анализ данных" для более глубокого понимания этих очень важных характеристик окружающего нас мира.
Кроме того, мы кратко рассмотрели понятие калибровки систем. Показано, что характеристики прибора могут меняться со временем в связи с чем необходимо достаточно часто и регулярно проводить калибровку (особенно при изменении внешних условий измерений). Для этого показаны различные методы существующей калибровки (калибровка по одной точке, калибровка по двум точкам и калибровка по трем точкам).
References
- x-engineer
- Transfer function
- Caltech course CDS 101/110, Fall 2004, Analysis and Design of Feedback Systems
- Yang, Zhaoxin & Meng, Xiaofeng. (2012). Temperature measurement by thermocouple probe: influences of variable fluid velocity on the dynamic characteristics of thermocouple. 10.2991/emeit.2012.425. DOI: 10.2991/emeit.2012.425
All_cite 1. Measurement and Instrumentation. Theory and Application. Book. 2nd Edition • 2016 2. Instrumentation Reference Book. Book. 4th Edition. 2010
- M.B.Stout: Basic Electrical Measurements, 2/e, Prentice Hall of India, New Delhi, 1981.
- R.Pallas-Areny and J.G.Webster: Analog Signal Processing, John Wiley, NY, 1999.
- R.B. Northrup: Introduction to Instrumentation and Measurements (2/e), CRC Press, Boca Raton, 2005.
- J.W. Dally, W.F. Riley and K.G. McConnell: Instrumentation for Engineering Measurements (2/e), John Wiley & Sons, NY, 2003.
3.5 Упражнения и вопросы
Имеется лазерный датчик перемещения со следующими характеристиками:
- Диапазон измерений: \(\pm 10\) мм
- Точка измерения: 40 мм
- Разрешение: 3 мкм
- Линейность: 1 % полной шкалы
- Время отклика: 0.15 мс
- Линейный выход: 4-20 мА
Ответьте на следующие вопросы:
- Объясните смысл каждого из терминов.
- Предположим, дистанция между сенсором и объектом равна 35 мм. Какой должен быть выход в мА?
- Какая будет погрешность от нелинейности для данных условий?
- Определите чувствительность данного сенсора в мА/мм.
Определите разрешение 10-битного АЦП (ADC), если он питается от 10В источника.
Точность датчика давления в диапазоне 0-10 кПа составляет 2%. Опер делите максимальную погрешность измерения в Па, если датчик показывает 4.0 кПа.
Докажите следующие утверждения:
- Потенциометр является устройством 0 порядка.
- Простая термопара является устройством 1ого порядка.
- Акселерометр является устройством второго порядка.
Определить ошибку (в процентах), если индикатор температуры показывает \(189.8^o C\), когда фактическая температура составляет \(195.5^o C\).
Проведите различие между грубой ошибкой и систематической ошибкой. Запишите два возможных источника систематической ошибки.
Объясните термин "ограничивающая погрешность". Обоснуйте, почему при измерении всегда рекомендуется брать показания там, где они близки к полному диапазону.
Обоснуйте, почему наиболее вероятным значением множества единичных данных является их среднее арифметическое.
Значение сопротивления \(R_t\) металлического провода при температуре \(t\) задается выражением, \(R_t = R_0 (1+ \alpha t)\) где, \(R_0\) - сопротивление при \(0^o C\), а \(\alpha\) - температурный коэффициент сопротивления. Значения сопротивления металлического провода при различных температурах приведены ниже. Получить значения \(R_0\) и \(\alpha\) можно, используя метод наименьших квадратов.
Tempareture (oC) 20 40 60 80 100 Сопротивление (ом) 107.5 117.0 117.0 128.0 142.5 Большинство приборов имеют регулировку нуля и диапазона, что это значит?
Объясните калибровку по трем точкам и ее преимущество перед другими типами калибровок.
4. Измерения температуры (temperature measurement)
4.1 Описание раздела
В настоящем разделе будет рассмотрено понятие температуры и способов ее измерения. Человечество не так давно научилось воспроизводимо измерять температуру и первые термометры появились только в 17 веке, благодаря открытию Галлилео Галелея (Galileo Galilei). Однако это открытие произошло одновременно с аналогичным открытием немецкого ученого Дреббелем (Drebbel). При этом первые термометры были чувствительны и к температуре, и к давлению - т.е. были не селективны.
Для калибровки шкалы исторически используется 2 точки однако они могут отличаться.
- Шкала Фаренгейта: 0 - смесь соли со льдом, 96 - температура человеческого тела. Тогда температура плавления льда равна \(32^0\), а кипения воды: \(212^0\).
- Шкала Цельсия: 0 - температура плавления льда, 100 - температура кипения воды.
- Шкала Кельвина (самая поздняя и "абсолютная"): 0 - абсолютная температура замерзания газа водорода (абсолютный ноль), 273 - температура замерзания воды.
Задание 4.1. Вспомните, какие могут быть недостатки у калибровки по 2ум точкам?
Задание 4.2. На основании калибровочных данных, приведенных выше, предложите уравнения пересчета из одной шкалы в другую.
Изначально термометры служили для измерения атмосферной температуры или температуры тела. Однако сегодня нам необходимо измерять температуру для гораздо более широкого спектра задач и в гораздо более широких диапазонах. Для этого используются следующие основные типы термометров:
- Жидкие и газообразные термометры (liquid and gas thermometer).
- Биметаллические пластины (bimetallic strip).
- Термометры сопротивления (металлические и полупроводниковые, resistance thermometers: RTD and Thermistors).
- Термопары (thermocouple).
- Соединительный полупроводниковый датчик (Junction semiconductor sensor).
- Радиационный пирометр (Radiation pyrometer).
В рамках данного курса мы рассмотрим лишь некоторые из перечисленных типов термометров. Хотелось бы, что бы по окончанию раздела вы умели следующее:
- Знали терминологию.
- Различали принципы работы RTD и Термистора.
- Могли объяснить значение термина компенсации сопротивления для RTD ("компенсация проводниками", lead wire compensation).
- Различали характеристики PTC и NTC термисторов.
- Могли выбрать необходимую термопару для конкретного температурного диапазона.
- Могли разработать простую компенсационную схему холодного соединения (cold junction compensation) для термопары.
4.2 Термометры на основе сопротивления (Resistance Thermometers)
Как известно из законов физики, сопротивление металлических проводников возрастает с ростом температуры. С другой стороны для полупроводников (semiconductors) - как правило зависимость обратная (уменьшается). Таким образом термометры, использующие металлические проводники для измерения температур, называются Термометр сопротивления (Resistance Temperature Detector, RTD), а использующие полупроводники - thermistors (термисторы). При этом RTD более прочны и имеют более-менее линейные характеристики в широком диапазоне температур. С другой стороны термисторы более чувствительны, но имеют нелинейные характеристики.
4.2.1 RTD (термометр сопротивления)
Общая формула зависимости сопротивления от температуры для металлического проводника может быть представлена как:
$$ R_t = R_0[1+\alpha(t-t_0) + \beta (t-t_0)^2 + \dots] $$где \(R_t\) и \(R_0\) - значения сопротивления при \(t^0 C\) и \(t_0^0 C\) соответственно; \(\alpha\), \(\beta\) и т.д. - константы, которые зависят от металла.
Для небольшого диапазона температур, можно упростить уравнение до:
$$ R_t = R_0[1+\alpha(t-t_0)] $$при этом для меди \(\alpha = 0.00427 /^o C\).
Медь, никель и платина - наиболее часто используемые металлы для RTD. Диапазон измеряемых температур определяется в зависимости от диапазона, где зависимость сопротивление-температура приблизительно линейна (рис. 4.1).
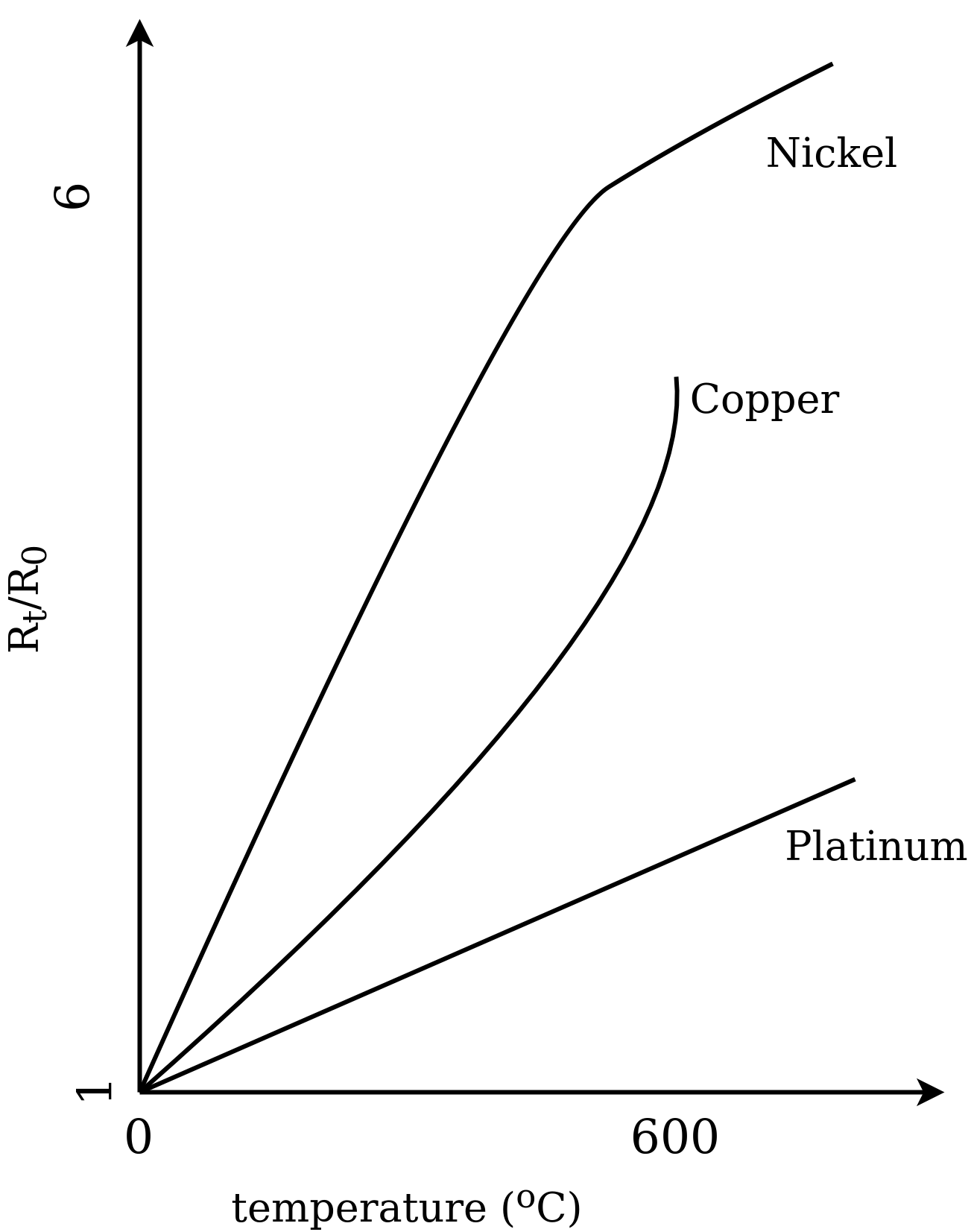
Рис. 4.1. Зависимость сопротивление-температура для различных металлов при $t_0 = 0^0 C$. Задача 4.3 Сравните приведенные характеристики с температурами плавления данных металлов. Какие выводы можно сделать?
Конструкция
Редко когда незащищенная металлическая проволока может быть использована для температурных измерений в промышленности. Для ее защиты от механических повреждений используют различные дополнительные материалы (рис. 4.2).
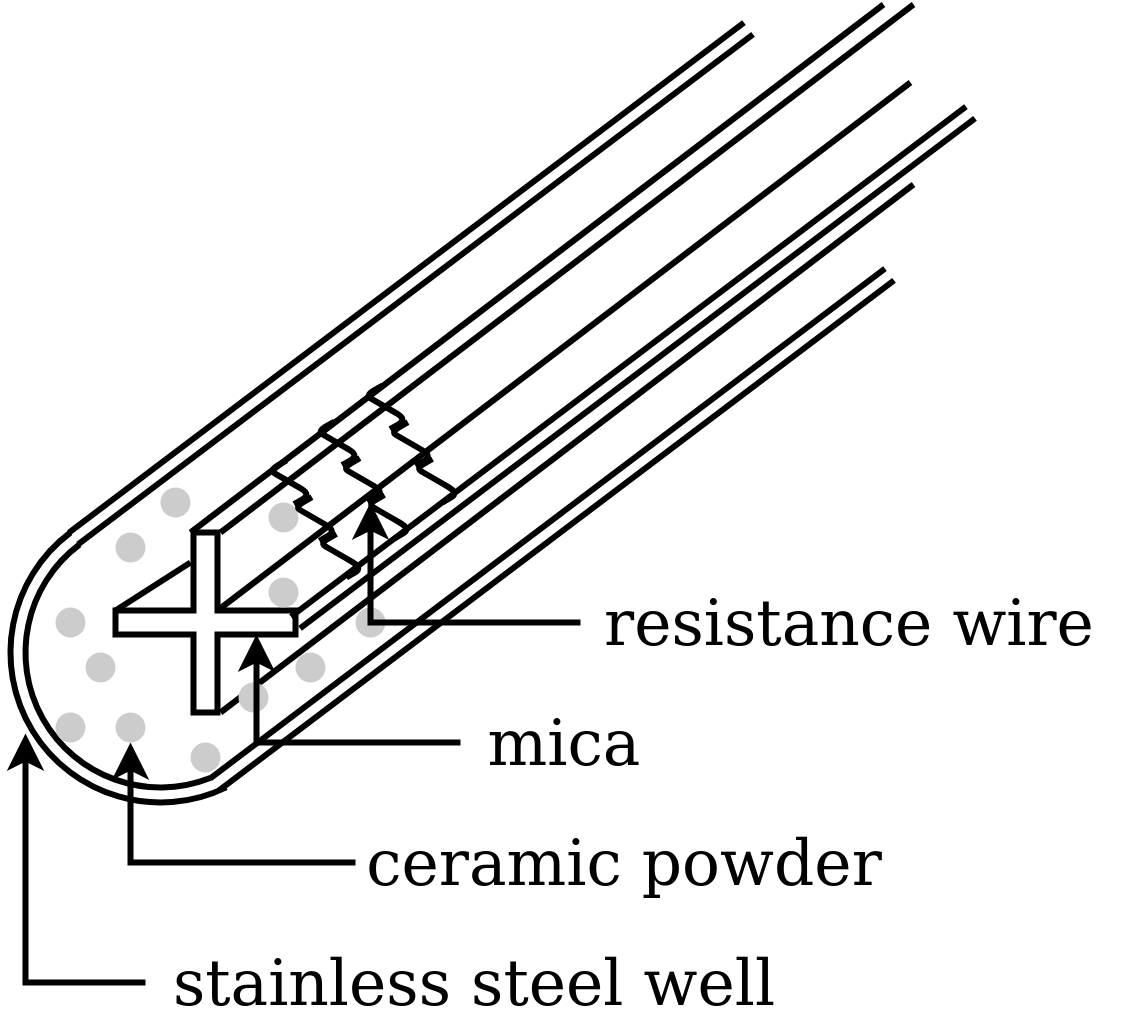
Рис. 4.2. Конструкция промышленного RTD.
- Измерительная проволока зачастую помещается в оболочку из нержавеющей стали (помимо механической защиты, это обеспечивает удобство эксплуатации - дефектный сенсор может быть легко заменен на новый без изъятия корпуса из производства).
- Между оболочкой и проволокой помещается проводящий тепло (но не проводящий электрический ток) материал (например, керамическая крошка).
- Измерительный провод (resistance wired) должен быть аккуратно намотан на подложку из слюды (mika) или кварца, чтобы избежать растяжения и сжатия в процессе измерения температуры (такие материалы как кварц или слюда имеют небольшие значения температурных деформаций).
Улучшение качества сигнала (Signal conditioning)
Изменение сопротивления RTD может быть измерено непосредственно вольт-амперметром или с использованием измерительного моста (мост Уитстона, Wheatstone's bridge). Однако основным ограничением для точного измерения температуры является вклад проводящих проводов (lead wires) в общее измеренное сопротивление. Поскольку длина проводника от RTD до измерительного устройства может изменяться, это может сказаться на точности измерения температуры. Однако существует метод для компенсации влияния длины проводника (т.е. его дополнительного сопротивления). Это метод заключается в использовании трехпроводного или четырех проводного RTD в виде моста (рис. 4.3).
Примечание. Вообще понятие моста чрезвычайно важно для измерительных систем и автоматизации в целом. Советую вам обращать пристальное внимание на все подобные "мостовые" схемы и хорошо разобраться в данном вопросе.
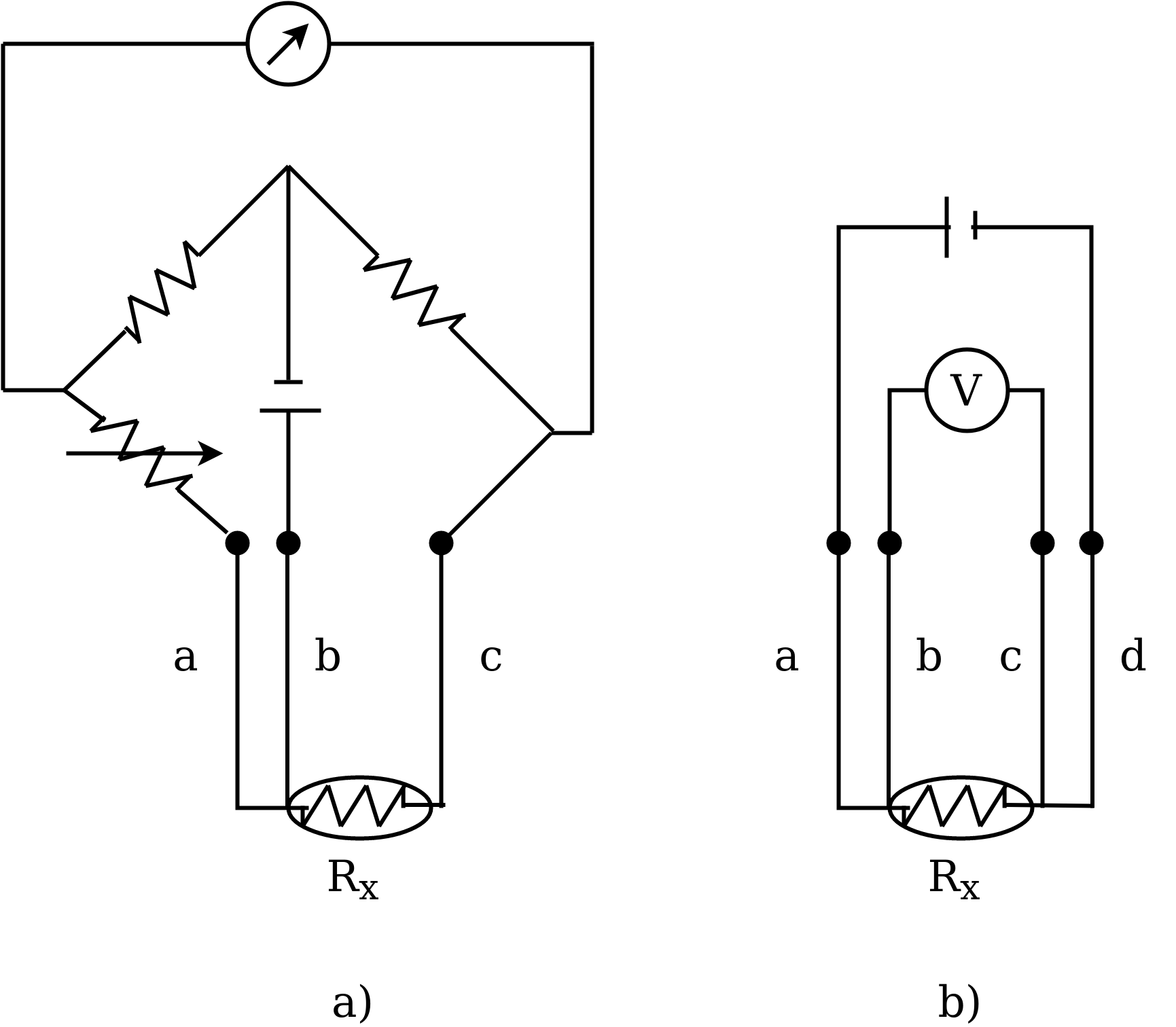
Рис. 4.3. Компенсационная схема для а) трех проводного и б) четырех проводного RTD В трехпроводном методе один дополнительный "фиктивный" провод (4.3.а - а), взятый из элемента сопротивления, соединен в мост таким образом, что два подводящих провода (4.3.а - b, c) соединяются с двумя смежными рычагами моста, тем самым устраняя эффект друг от друга (рис. 4.3(а)). На рис. 4.3(b) показан четырехпроводной метод (схема Кельвина) измерения. Он аналогичен четырем клеммам сопротивления: две клеммы используются для подачи тока, в то время как две другие - для измерения напряжения. Тогда сопротивления проводов a, b, c, d компенсируют друг друга и измеряется только сопротивление целевого RDT.
4.2.2 Термистор (thermistor)
Термистор - это полупроводниковый тип термометров по сопротивлению. Они обладают бОльшей чувствительностью, но при этом у них крайне нелинейные характеристики. Это становиться понятным из того факта, что для типичного 2000 \(\Omega\) термистора сопротивление меняется на 80 \(\Omega/C^0\) при \(25^0 C\), тогда как для платинового RTD изменением сопротивления составит 7 \(\Omega/^0 C\) при тех же \(25^0 C\). Термисторы могут быть 2 типов: а) с негативным температурным коэффициентом (NTC) и б) с позитивным температурным коэффициентом (PTC) (рис. 4.4).
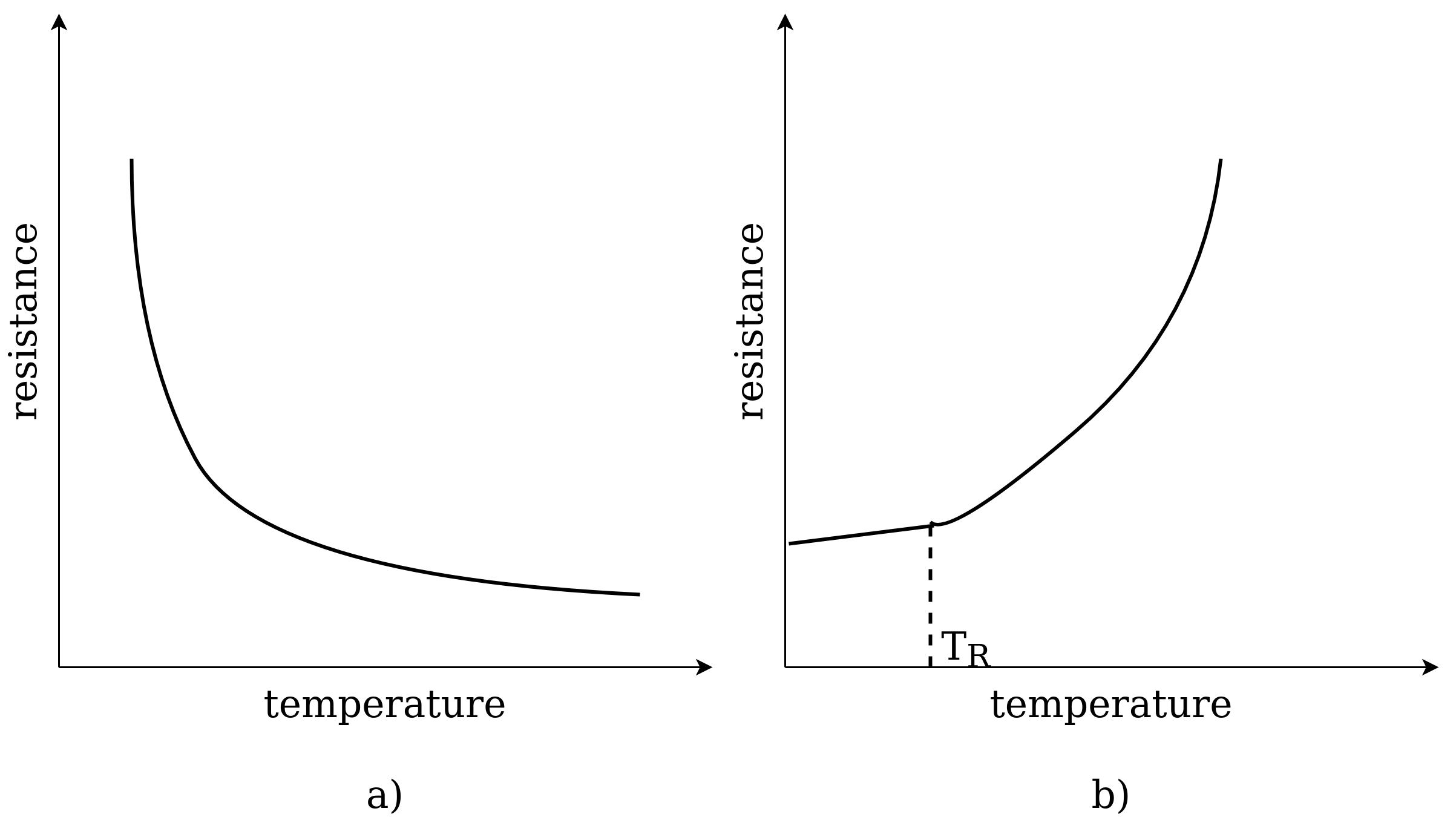
Рис. 4.4. Типичные характеристики термисторов: а) NTC, б) PTC. Наиболее распространенными являются термисторы NTC типа. Обычно они производятся из оксидов железа, марганца, магния и др. Их характеристики могут быть выражены уравнением:
$$ \begin{equation}\begin{aligned} R_T = R_0 e^{\beta (\frac{1}{T} - \frac{1}{T_0})} \end{aligned}\end{equation} \tag{4.1}\label{eq4.1} $$где, \(R_T\) - сопротивление при температуре T [K] \(R_0\) - сопротивление при температуре \(T_0\) [K] \(T_0\) - температура сравнения, обычно \(25^0 C\) \(\beta\) - константа, которая определяется в зависимости от характеристик материала, обычно принимается 4000 условных единиц.
Из уравнения \(\eqref{eq4.1}\) можно получить температурный коэффициент сопротивления [\(K^{−1}\)]:
$$ \alpha_T = \frac{1}{R_T} \frac{dR_T}{dT} = - \frac{\beta}{T^2} $$Таким образом мы получили негативный коэффициент \(\alpha_T\), что соответствует NTC термистору.
Термисторы обычно используются в интервале температур от -100 до +300 \(^0\) C. При этом, как правило, только один термистор не может использоваться для всего диапазона измерений. Более того, существующие термисторы не являются взаимозаменяемыми: между двумя термисторами одного типа имеется заметное отклонение номинального сопротивления и температурного коэффициента. Таким образом, если неисправный термистор будет заменен новым аналогичного типа, то необходимо проводить калибровку. Доступные на рынке термисторы имеют стандартные значения в 1К, 2К, 10К, 20К, 100К и т.д.. Эти значения показывают уровень сопротивления при 25 \(^0 C\) в [Ом]. Термисторы доступны в разных формах: шарик, стержень, диск и т.д.. Как правило, размер чувствительного элемента небольшой, что позволяет проводить точечное измерение температуры. Константа времени реагирования также мала, из-за малого размера элемента.
Стоит учитывать, что нелинейные отрицательные температурные характеристики также дают увеличение погрешности из-за эффекта самонагревания термистора. Когда через термистор протекает ток, то генерируется тепло согласно \(I^2R\) потерям энергии, что может увеличить температуру чувствительного элемента. В свою очередь это приведет к уменьшению сопротивления и цепной реакции за счет чего продолжает увеличиваться проходящий ток и температура. Если не устранить данный эффект, он может привести к необратимому повреждению термистора (он просто сгорает). Для предотвращения такой цепной реакции необходимо ограничить протекание тока ниже указанного в спецификациях значения.
Нелинейные характеристики термисторов часто вызывают проблемы с точным измерением температуры и часто бывает необходимо специально линеаризовать характеристики термистора. Это может быть сделано за счет добавления одного постоянного сопротивления (резистора), параллельного термистору. Температурные характеристики нового эквивалентного сопротивления будут более линейными. Однако это приведет к уменьшению общей чувствительности.
Термисторы с позитивным температурным коэффициентом (PTC) имеют ограниченную область применения и в основном используются для защиты моторов и трансформаторов (transformer widings). Как показано на рис. 4.4 б), они имеют низкое и относительно постоянное сопротивление ниже пороговой температуры \(T_R\), после которой сопротивление быстро возрастает. PTC термисторы производятся из соединений бария, свинца и титаната стронция.
4.3 Термопары (thermocouple)
Открытие возможности генерировать электрическую энергию от температуры (термальной энергии) принадлежит Thomas Johan Seeback (1821 г., в нашей литературе - Зеебек). Суть явления в том, что когда области соединения нескольких разнородных металлов (проводников) подвергается воздействию различных температур, то образуется ЭДС (электродвижущая сила). Фактическое значение генерируемого ЭДС зависит от используемых материалов и разницы температур между горячим и холодным соединениями. Генерируемая ЭДС, на самом деле, обусловлена сочетанием двух эффектов: эффект Пельтье (Peltier) и эффект Томсона (Thomson, в нашей литературе известный как эффект Зеебека). Типичный термоэлектрический переход в ЭДС показан на рис. 4.5.
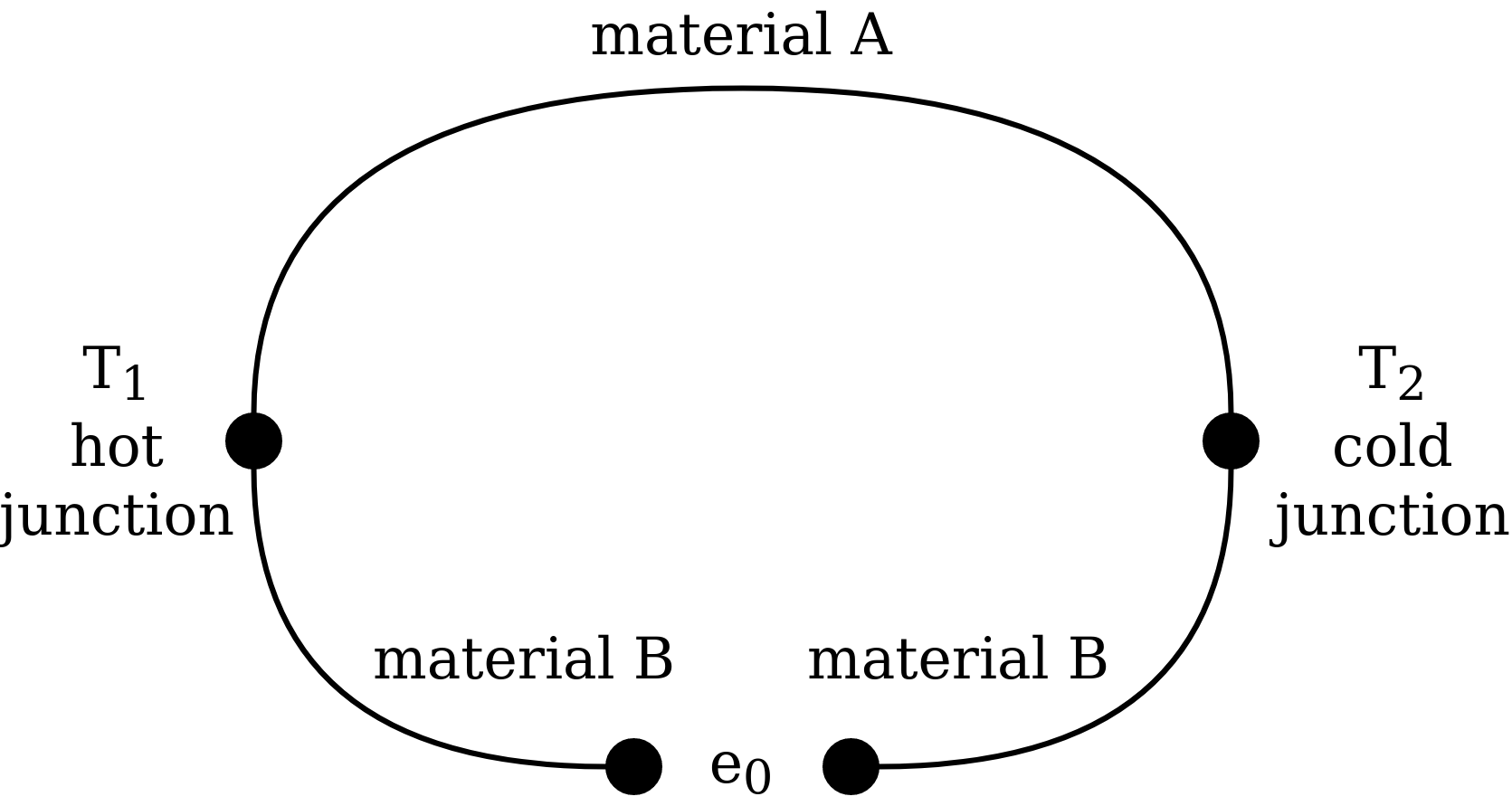
Рис. 4.5. Классическая термопара (hot junction, cold junction - горячая и холодная область соединения проводников соответственно). Генерируемая ЭДС может быть приблизительно выражена такой зависимостью:
$$ e_0 = C_1 (T_1 - T_2) + C_2 (T_1^2 - T_2^2) \mu v $$где: \(T_1\) и \(T_2\) - горячая и холодная температуры (К). \(C_1\) и \(C_2\) - константы, зависящие от материала термопары (например, \(C_1 = 62.1\), \(C_2 = 0.045\) для Медно/Константной термопары).
Термопары очень широко используются при измерениях температур в производственных условиях. Основные причины такой популярности следующие:
- они прочны, и их показания стабильны;
- они могут измерять в широком диапазоне температур (большой линейный диапазон измерений);
- их характеристики практически линейны в широком диапазоне с точностью около \(\pm 0,05\%\).
Однако основным недостатком термопар является их низкая чувствительность по сравнению с другими приборами для измерения температуры (например, RTD или термисторами).
4.3.1 Материалы термопар
В теории, любая пара разных металлов (проводников) может использоваться как термопара. Но на практике, только несколько материалов получили широкое распространение. На выбор материалов влияет несколько факторов: чувствительность, стабильность калибровки, инертность в условиях эксплуатации и взаимозаменяемость (термопара должна иметь возможность заменены на такую же без дополнительной калибровки). В табл. 4.1 приведены основные термопары (их тип, композиция, диапазон температур, чувствительность и т.д.).
Табл. 4.1. Характеристики и материалы термопар
Тип Позитивный сплав Негативный сплав Температурный диапазон, оС Температурный коэффициент вариации (мкВ/ оС) Линейный диапазон (оС) и
чувствительность в нем (мкВ / оС)R Платина-Родий (87% Pt, 13% Rh) Платина 0-1500 5.25-14.1 1100 - 1500 (13,6-14,1) S Платина-Родий (90% Pt, 10% Rh) Платина 0-1500 5.4 - 12.2 1100 - 1500 (13,6-14,1) K Хромель (90% Ni, 10% Cr) Алюмель (Ni94Al2, Mn3Si) -200 - 1300 15.2 - 42.6 0 - 1000 (38 - 42.9) E Хромель Константант (57% Cu, 43% Ni) -200 - 1000 25.1 - 80.8 300 - 800 (77.9 - 80.8) T Медь Константант -200 - 350 15.8 - 61.8 нелинеен J Железо Константант -150 - 750 21.8 - 64.6 100 -500 (54.4 - 55.9) Примечание. Верхний температурный диапазон работы термопары обычно зависит от условий, в которых она используется. Например, верхний порог для Chromel/Alumel термопары может быть увеличен в окислительной атмосфере, в то время как для Iron/Constantan он может быть увеличен в вакууме.
4.3.2 Законы термопар
Эффекты Плетье, Зеебека и Томпсона объясняют основные принципы генерации ЭДС от термопар. Но их не достаточно, чтобы обеспечить приемлемые методики измерений для каждой конкретной ситуации. Для этого существуют 3 закона термоэлектрических цепей (three laws of thermoelectric circuits), которые дают нам полезные практические советы по измерению температуры. Эти законы известны как:
- закон однородной цепи (law of homogeneous circuit);
- закон промежуточных металлов (law of intermediate metals);
- закон промежуточных температур (law of intermediate temperature).
Эти законы можно объяснить с помощью рис. 4.6.
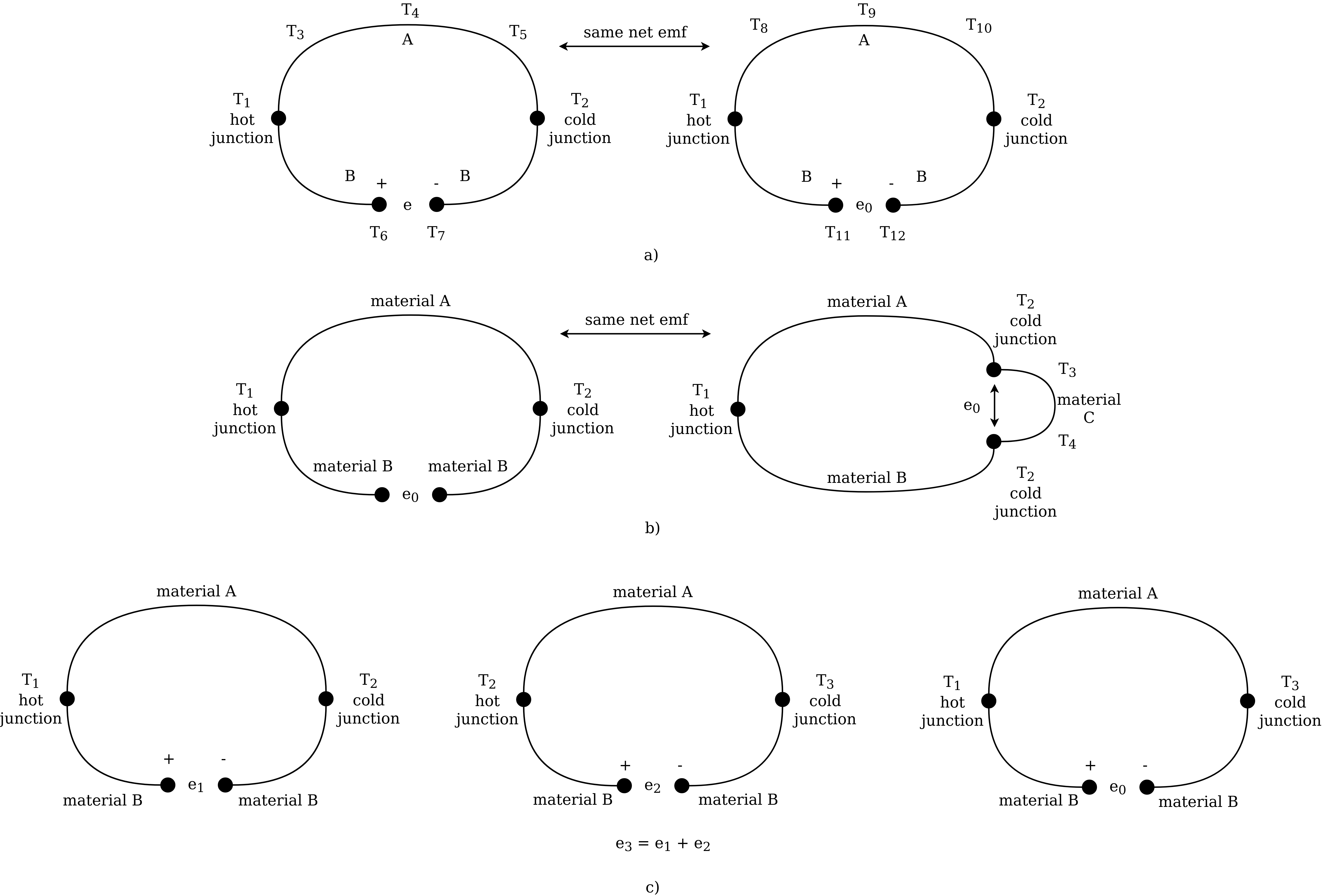
Рис. 4.6. Законы термопар. Первый закон можно объяснить с помощью рис. 4.6 (a) - общая сгенерированная ЭДС зависит только от материалов и температур проводников и не зависит от промежуточных температур.
Согласно 2 закону (рис. 4.6 (b)), если подключить третий материал в любой точки (формируется 2 дополнительных соединения), то он не будет оказывать никакого эффекта, если эти 2 дополнительных соединения остаются при одинаковых температурах. Этот закон позволяет вставить измерительное устройство без влияния на общую ЭДС.
Третий закон относиться к калибровке термопар. Он гласит, что если термопара производит ЭДС \(e_1\) при температуре проводников \(T_1\) и \(T_2\) и \(e_2\) при температурах \(T_2\) и \(T_3\), то она производит общую ЭДС \(e_1 + e_2\) при температурах \(T_1\) и \(T_3\) (рис. 4.6 (c)).
Третий закон особенно важен с точки зрения компенсации измерительного соединения. Калибровочный график термопары строится по холодному участку термопары (\(0^оС\)). Однако в реальных измерительных условиях температура холодного участка редко поддерживается одинаковой и равной температуре при калибровке (обычно ее никак не изолируют и она обладает температурой окружающей среды). Третий закон помогает нам вычислить точную температуру горячего участка с компенсацией новой температуры холодного участка с помощью калибровочных таблиц.
Пример 4.1 Следующая таблица была получена при калибровке железо-константной термопары с температурой калибровки \(0^оС\) (эталонная).
Температура (оС) 15 30 40 ... 180 190 200 208 210 ЭДС (мВ) 0.778 1.56 2.11 ... 9.64 10.25 10.74 11.20 11.32 Пример. Предположим, что температура горячего стыка измеряется термопарой железо-константан при температуре холодного стыка \(30^oC\), а измеренное напряжение составляет 9,64 мВ. Требуется найти фактическую температуру горячего участка термопары (горячий стык).
Решение
Обратимся к 3 закону термоэлектрических цепей (рис. 4.6 (с)): \(T_1\) - неизвестная температура, \(T_2 = 30^oC\), \(T_3 = 0^0C\). Измеренное напряжение составляет \(e_1 = 9.64\) мВ, а калибровочное напряжение \(e_2 = 1.56\) мВ. Тогда: \(e_3 = e_1 + e_2 = 11.20\) мВ. Следовательно, согласно калибровочной таблице, фактическая температура составит \(T_1 = 208^oC\).
4.3.3 Компенсация холодного участка термопар (спай, стык)
Из рассмотренного выше примера следует, что выходное напряжение термопары будет изменяться при изменении температуры холодного участка ("холодного соединения"). Поэтому для измерения температуры желательно, чтобы холодный участок термопары поддерживался при постоянной температуре. Для данной цели можно использовать ледяную ванну или другие способы "изолирования" температуры от окружающей среды (например, использование термостатической печи с постоянной температурой), но это не является практичным решением для промышленности. Поэтому наиболее распространенный случай работы термопар - это когда холодное соединение имеет температуру окружающей среды. В этом случае при измерении высокой температуры погрешность будет мала (не значима) и ее можно уменьшить с помощью табличного пересчета.
Пример. При измерении температуры \(1500^o C\) с температурой окружающей среды в пределах \(25 \pm 15^o C\) погрешность составит около 1%.
Задача. Обоснуйте приведенное выше утверждение.
Однако при более низких температурах погрешность будет возрастать. Тогда используют различные варианты температурной компенсации (вспоминаем про измерительный мост). Типичная схема подобной компенсации приведена на рис. 4.7.
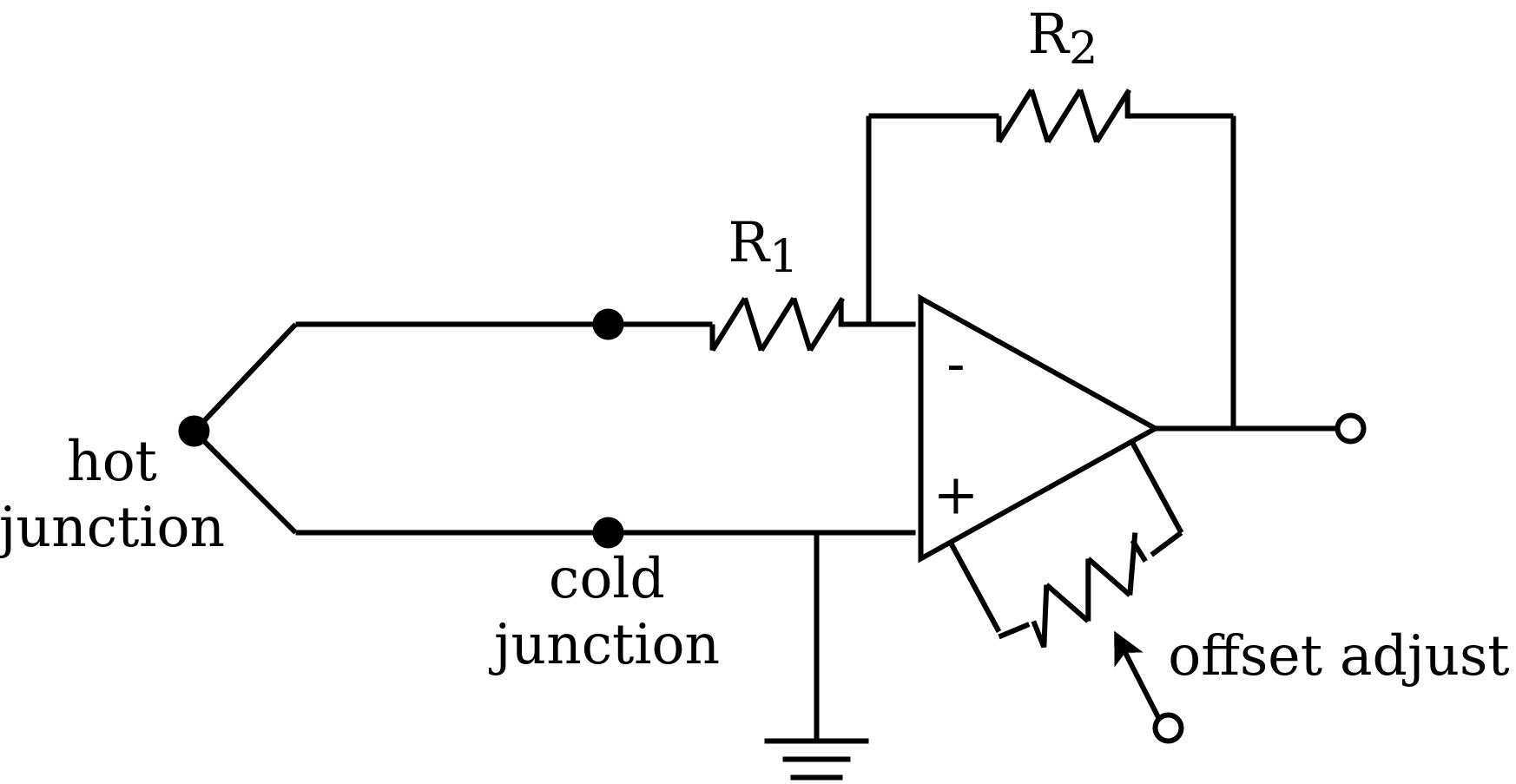
Рис. 4.7. Простой метод компенсации температуры холодного участка термопары. Здесь через смещение операционного усилителя (op-amp) добавляется постоянное напряжение, соответствующее температуре окружающей среды. Напряжение термопары также усиливается этим же операционным усилителем (op-amp).
Более точный метод температурной компенсации холодного участка термопары представлен на рис. 4.8.
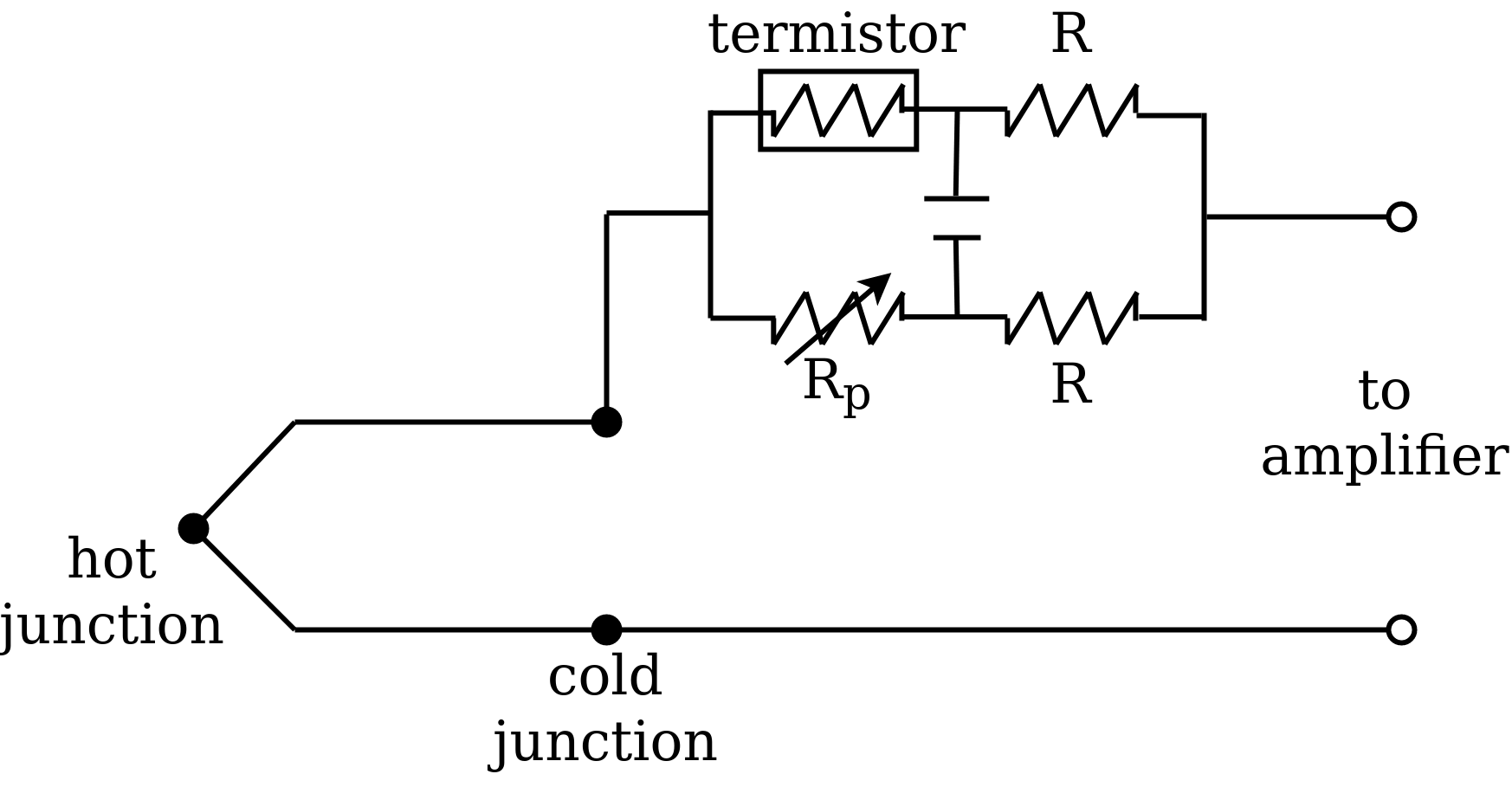
Рис. 4.8. Компенсационная схема с использованием измерительного моста (моста Уитстона, Wheatstone bridge). Здесь термистор или ТДС (RTD) используется для измерения температуры окружающей среды и компенсации погрешности через мостовую схему. Мостовая схема балансируется при \(0^o C\). Когда температура окружающей среды поднимается выше \(0^o C\), генерируемая в термопаре ЭДС будет снижаться, но в то же время в мостовую цепь будет добавляться напряжение от термистора для компенсации.
Как указано на рис. 4.8, компенсация холодного участка термопары обычно происходит вместе с контурами формирования сигнала вдали от точки измерения (горячий участок). Это может потребовать использования длинных проводов из материала термопары к цепи компенсации. Для уменьшения длины дорогостоящих проводов термопары (в некоторых случаях платина) обычно используются недорогие компенсационные провода между термопарой и цепью компенсации. Эти провода подбираются таким образом, что бы их характеристики температурной ЭДС были близки к характеристикам проводов термопары при температуре окружающей среды.
4.4 Заключение
Температура является одним из самых важных параметров технологических процессов. Это параметр требует постоянного измерения в огромном количестве процессов и устройств (например очень хорошей практикой является измерение температуры двигателей различных актуаторов). При этом среди множества типов измерителей температуры, наиболее распространенными являются термометры сопротивления и термопары. Их популярность в основном обусловлена прочностью, повторяемостью (от сенсора к сенсору) и широкими линейными диапазонами рабочих температур. "Чистые" термометры сопротивления и термопары редко используются на практике, вместо этого их помещают в защитные металлические оболочки. Наряду с этим, должны использоваться и цепи формирования сигнала для уменьшения погрешностей (наши любимые измерительные мосты и различные их вариации).
Примечание. На практике существуют случаи, когда измеряемые температуры превышают \(2000^o C\). Рассмотренные нами подходы не в состоянии измерить настолько высокую температуру. Вместо этого измерение проводится на расстоянии бесконтактным методом (радиационные пирометры). Но это уже совсем другая история...
4.5 Упражнения
- Назовите материалы, которые обычно используется для ТДС (RTD). Какой из них обладает наиболее широкими линейными характеристиками?
- Что имеется в виду под компенсацией проводов для ТДС? Как работают данные устройства?
- PT-100 - это платиновый ТДС, сопротивление которого при \(0^oC = 100 \Omega\). Если температурный коэффициент сопротивления платины составляет \(3.91 \times 10^{-3} \frac{1}{^oC}\), то найдите его сопротивление при \(100^oC\).
- В чем разница между термистором NTC и PTC типа?
- Обоснуйте, почему термистор больше подходит для измерения температуры в небольшом диапазоне.
- Назовите три типа термопар и их температурные диапазоны.
- Нарисуйте схемы и объясните 3 закона термопар.
- Что подразумевается под компенсацией холодного участка термопары? Предложите 2 способа такой компенсации.
- Термопара имеет линейную чувствительность \(30 \mu v / ^oC\) и откалибрована при температуре холодного соединения \(0^C\). Данная термопара используется для измерений при температуре холодного соединения \(30^oC\). Найдите актуальную температуру горячего соединения, если генерируемая ЭДС равна \(3.0 mv\).
5. Измерения давления и силы (temperature measurement)
5.1. Введение и цели
В этом разделе мы обсудим различные методы измерения давления и силы. Для этого, как правило, используют эластичные элементы, такие как мембраны (diaphragms) и трубки Бурдона (Bourdon tubes). С другой стороны, могут использоваться и тензодатчики (strain gages), однако они применяются для измерения силы (усилия). Конструкции и принципы работы различных упругих элементов для измерения давления рассмотрены далее в настоящей главе. За ними следует рассмотрение тензодатчиков и способов их использования в неразрушающем контроле.
В результате анализа данной главы необходимо уметь:
- Назвать различные способы измерения давления с помощью эластичных преобразователей (transducers).
- Объяснить конструкцию и принцип работы датчика давления с трубкой Бурдона (Bourdon tube).
- Определить коэффициент деформации датчиков давления (strain gage).
- Назвать различные материалы тензодатчиков и указать их коэффициенты замера (gage factors).
- Нарисовать схему соединения несбалансированного моста с четырьмя тензодатчиками, чтобы получить максимальную чувствительность и идеальную температурную компенсацию.
- Назвать различные способы измерения силы с помощью тензодатчиков.
5.2. Измерение давления
Измерение давления внутри замкнутого пространства (трубопровод или контейнер) в производственных условиях является весьма сложной задачей. Необходимо учитывать, что показатели давления могут меняться в широких диапазонах и довольно быстро (от очень высокого до вакуума). При этом измеряемая среда тоже может быть разнообразной: как жидкой, так и газообразной. В настоящей главе мы не будем обсуждать методы измерения давления в вакууме, а попытаемся сконцентрироваться на общих методах измерения давления, которое превышающего атмосферное (это наиболее частый случай в различных производствах). Такие измерения в основном осуществляются с помощью различных упругих элементов: мембран (diaphragms), мехов (bellows) и трубок Бурдона (Bourdon tubes). Эти эластичные элементы меняют свою форму в зависимости от приложенного давления, а изменение формы может быть измерено с помощью подходящих датчиков изгиба (deflection transducers) или конденсаторов.
5.2.1 Мембраны (diaphragms)
Как правило, различают три типа мембран:
- Тонкая пластина (Thin plate);
- Мембрана (Membrane);
- Гофрированная диафрагма (Corrugated diaphragm) .
Данная классификация основана на различиях в силе воздействующего давления и вызываемых соответствующих смещениях. При этом принцип измерения остается одним и тем же - с использованием датчиков смещения (например, измеряя емкость конденсатора).
1. Тонкая пластина (thin plate) - изготавливается путем механической обработки цельного блока заготовки с изготовлением круглой тонкой части посередине. Такая конструкция похожа на мембрану, но используется для измерения относительно высокого давления.
2. В мембране (membrane) - чувствительный участок наклеивается между двумя твердыми блоками. Толщина мембраны гораздо меньше пластины в первом случае и, как следствие, смещение в ответ на давление гораздо больше (а значит больше и чувствительность).
3. Гофрированная мембрана (corrugated diaphragm). Используется для еще большего увеличения чувствительности. Когда при небольшом изменении давления может быть получено очень большое отклонение (изменение формы). Однако при этом теряется линейность отклика.
Общий вид мембранных датчиков приведен на рис. 5.1.
Рис. 5.1. Устройство датчиков мембранного типа. Для изготовления таких сенсоров используются бронза, латунь, нержавеющая сталь и т.д. В последнее время широко используются мембраны из кремния в датчиках давления MEMS (Micro Electro Mechanical Systems, Микроэлектромеханические системы).
Отклонение мембраны может быть выражено как:
$$ f_n = \frac{1}{2 \pi} \sqrt{\frac{k}{m_{eq}}} $$где
\(m_{eq}\) - эквивалентная масса,
\(k\) - константа упругости для диафрагмы.
Рабочее отклонение при измеряемом давлении должна быть меньше, чем собственное отклонение мембраны (иначе датчик выйдет из строя).
Как вы уже могли понять, принцип работы мембранных датчиков весьма прост. При подаче давления на мембрану она отклоняется, и максимальное отклонение в центре (\(y_0\)) может быть измерено с помощью датчика смещения (например как изменение емкости конденсатора). Для тонкой пластины максимальное отклонение \(y_0\) мало (\(y_0 \lt 0,3t\)), а линейная зависимость между \(p\) и \(y_0\) выражатся как:
$$ y_0 = \frac{3}{16} p \frac{(1-\nu^2)}{Et^3}R^4 $$где
\(E\) - модуль упругости материала диафрагмы, и
\(\nu\) - отношение Пуассона.
$$ p_{max} = 1.5(\frac{t}{R})^2 \sigma_{max} $$где
\(\sigma_{max}\) - упругая степень деформации материала.
Для обычной мембраны мембраны при большом отклонение соотношение между \(p\) и \(y_0\) будет нелинейным (для \(\nu\) = 0.3):
$$ p = 3.58 \frac{Et^3}{R^4} y_0^3 $$Для гофрированной мембраны трудно дать какую-либо определенную математическую связь между \(p\) и \(y_0\); но эта связь также сильно нелинейна.
По мере деформации мембраны, величина и знак деформации будут отличаться для разных мест мембраны. Для нивелирования подобного эффекта используют четырех датчика смещения на самой мембране. Принцип работы подобных датчиков будет рассмотрен в следующем разделе.
Кроме того, следует понимать, что в реальных условиях математический расчет поведения диафрагм - весьма сложная задача. Поэтому важно использовать калибровку и внимательно изучать документацию для каждого конкретного мембранного сенсора.
5.1.2 Меха (сильфоны, bellows)
Такой тип сенсоров (рис. 5.2) изготавливается с мягкими стенками и один из жестких концов сенсора фиксируется (на нем же расположены отверстия для входа среды). Другой конец мехов свободно перемещается (как правило, именно на нем и происходит измерение действующего на меха давления).
Рис. 5.2. Схема сенсора типа "меха". Смещение свободного конца можно увеличить, за счет использования бОльшего количества изгибов (обычно варьируется от 5 до 20 "складок"). Часто используется внешняя пружина, установленная противоположно движению сильфонов. В результате из уравнения для пружины можно получить линейную зависимость для измерения давления:
$$ p \cdot A = k \cdot x $$где
\(A\) - площадь мехов,
\(k\) - константа сжатия,
\(x\) - перемещение мехов.
Для изготовления мехов обычно используют фосфорную бронзу, латунь, бериллиевую медь и нержавеющую сталь. Сильфоны изготавливаются либо путем токарной обработки цельного блока металла, либо путем пайки или сварки штампованных круглых колец, либо путем специальной прокатки (прессования) труб.
5.1.3 Трубка Бордона (Bourdon tube)
Наверное наиболее широко для индикации давления используются трубчатые манометры Бордона. Этот тип манометров был впервые разработан Э. Бордоном в 1849 году. Трубчатые манометры Бордона могут использоваться для измерения в широком диапазоне давлений: от вакуума до давления в несколько тысяч фунтов на кв. дюйм (psi). В основном такой манометр состоит из С-образной полой трубки, один конец которой закреплен и соединен с резьбовым соединением. Другой конец свободен и соединен с индикацией (рис. 5.3). Поперечное сечение трубы эллиптическое.
a)
b)Рис. 5.3. Трубка Бордона, схема (а) и пример (b, https://en.wikipedia.org/wiki/Pressure_measurement). При подаче давления эллиптическая труба пытается достичь круглого поперечного сечения, в результате чего трубка пытается выпрямиться. Таким образом, свободный конец трубки перемещается вверх в зависимости от величины давления. На свободном конце прикреплен механизм отклонения и индикации, который поворачивает указатель. В качестве материалов используют для изготовления также используют фосфорная бронзу, латунь и бериллиевую медь. Для 2" (два инч) общего диаметра трубы полезный ход свободного конца составляет примерно \(\frac{1}{8}\)". Несмотря на то, что трубы С-типа наиболее распространены, используются также трубы других форм, например, гелиоцентрические (helical), витые (twisted) или спиральные (spiral).
5.3. Измерение силы
Следующем после измерения давления является измерение силы. Наиболее популярным способом здесь является использование деформируемых измерителей. Мы измеряем деформацию, возникшую под действием силы, с помощью деформационных датчиков. В свою очередь, умножив данную деформацию на эффективную площадь поперечного сечения и модуль Юнга материала (Young’s modulus) мы получаем значение действующей силы. Тензодатчики (Load cells) и измерительные кольца (Proving rings) - два распространенных метода измерения силы с помощью деформации (strain gages). Сначала мы обсудим принцип работы тензометрических датчиков, а затем перейдем к прочим методам измерения силы.
5.3.1 Тензодатчик (Strain Gage)
Тензодатчик (strain gages) (иногда в России его называют тензорезистор) является одним из самых популярных типов преобразователей и имеет широкий спектр применения. Он может использоваться для измерения силы, крутящего момента, давления, ускорения и многих других параметров которые связаны с силой воздействия. Основной принцип работы такого датчика весьма прост: при применении растяжения (strain) к тонкой металлической проволоке изменяются ее размеры и, следовательно, сопротивление.
5.3.1.1 Коэффициент тензочувствительности (коэффициент замера датчика деформации, Gage Factor)
Рассмотрим длинную прямую металлическую проволоку длиной \(l\) круглого сечения диаметром \(d\). При воздействии силы, приложенной к этому проводу с двух концов, изменяется размер датчика (\(l\) меняется на \(l + \Delta l\), \(d\) меняется на \(d + \Delta d\) и площадь сечения \(A\) меняется на \(A + \Delta A\), рис. 5.4).
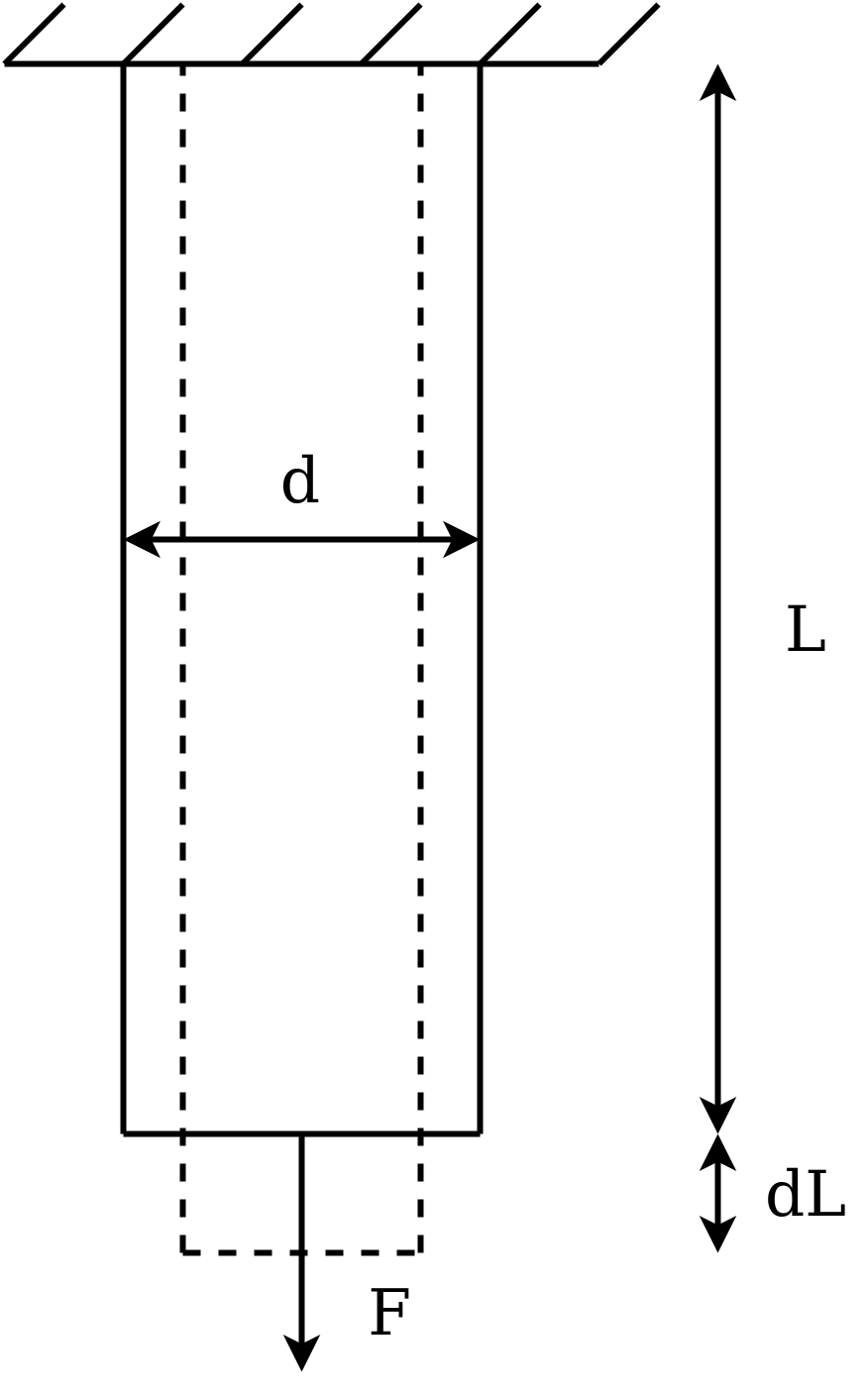
Рис. 5.4. Изменение сопротивления в зависимости от деформации (изменение площади сечения А показано пунктиром). Для простоты будем считать, что все изменения происходят в положительном направлении. Тогда зависимость сопротивление провода от его размеров будет выражаться следующим образом:
$$ R = \frac{\rho l}{A} $$где
\(\rho\) - электрическая проводимость, \(l\) - размер проводника, \(A\) - площадь сечения проводника.
Тогда изменение сопротивления в зависимости от растяжения:
$$ \Delta = (\frac{\delta R}{\delta l})\Delta l + (\frac{\delta R}{\delta A})\Delta A + (\frac{\delta R}{\delta \rho})\Delta \rho = \frac{\rho}{A} \Delta l - \frac{\rho}{A^2} \Delta A + \frac{l}{A} \Delta \rho = R \frac{\Delta l}{l} - R \frac{\Delta A}{A} + R \frac{\Delta \rho}{\rho} $$или,
$$ \begin{equation}\begin{aligned} \frac{\Delta R}{R} = \frac{\Delta l}{l} - \frac{\Delta A}{A} + \frac{\Delta \rho}{\rho} \end{aligned}\end{equation} \tag{5.1}\label{eq5.1} $$Тогда если площадь круглого сечения равна \(A=\frac{\pi d^2}{4}\), то \(\Delta A = \frac{\pi d}{2} \Delta d\). Или,
$$ \frac{\Delta A}{A} = 2 \frac{\Delta d}{d} $$Следовательно,
$$ \frac{\Delta R}{R} = \frac{\Delta l}{l} - 2 \frac{\Delta d}{d} + \frac{\Delta \rho}{\rho} $$Теперь введем константу, называемую "Пуассоновским отношением" (отношение поперечного сжатия к продольному расширению):
$$ v = -\frac{lateral\ strain}{longitudinal\ strain} = - \frac{\frac{\Delta d}{d}}{\frac{\Delta l}{l}} $$Соотношение Пуассона является свойством материала и не зависит от размера. Итак, с учетом \(\eqref{eq5.1}\) можно заключить, что:
$$ \frac{\Delta R}{R} = (1+2v)\frac{\Delta l}{l} + \frac{\Delta \rho}{\rho} $$Следовательно,
$$ \frac{\frac{\Delta R}{R}}{\frac{\Delta l}{l}} = 1 + 2v + \frac{\frac{\Delta \rho}{\rho}}{\frac{\Delta l}{l}} $$Последнее слагаемое в правой части вышеприведенного выражения представляет собой изменение сопротивления материала в результате приложенной деформации (возникающее из-за пьезостойкости материала). Фактически, все элементы в правой части приведенного выше уравнения не зависят от геометрии проволоки, подвергающейся деформации, а зависят только от свойств материала проволоки. Именно по этой причине для описания характеристик деформационного датчика используется так называемый коэффициент тензочувствительности ("Коэффициент замера", gage factor). Который определяется как:
$$ G = \frac{\frac{\Delta R}{R}}{\frac{\Delta l}{l}}=1 + 2v + \frac{\frac{\Delta \rho}{\rho}}{\frac{\Delta l}{l}} $$Если учесть, что для нормальных металлов отношение Пуассона \(v\) варьируется в диапазоне \( 0.3 \leq v \leq 0.6 $, а коэффициент пьезостойкости варьируется в диапазоне $0.2 \leq \frac{\frac{\Delta \rho}{\rho}}{\frac{\Delta l}{l}} \leq 0.6\), то мы получим, что "коэффициент тензочувствительности" металлических тензодатчиков варьируется в диапазоне \(1.8 \leq G \leq 2.6\).
Однако стоит учитывать, что для полупроводниковых тензодатчиков данный диапазон не верен и они имеют очень большой коэффициент тензочувствительности (в диапазоне 100-150 отн. ед.). Это достигается за счет сильного пьезостойкого свойства полупроводников. Коммерчески доступные тензодатчики имеют определенные фиксированные значения сопротивления, например, 120Ω, 350Ω, 1000Ω и др. Изготовитель также указывает коэффициент тензочувствительности и максимальный ток при измерении для исключения самонагрева датчика (обычно в диапазоне от 15 мА до 100 мА).
Выбор материала для металлического тензодатчика должен зависеть от нескольких факторов:
- материал должен иметь низкий температурный коэффициент сопротивления;
- материал должен иметь низкий коэффициент теплового расширения.
Исходя из приведенных факторов, только несколько сплавов пригодны для коммерческих металлических тензодатчиков:
- Advance (55% Cu, 45% Ni): Gage Factor between 2.0 to 2.2;
- Nichrome (80% Ni, 20% Co): Gage Factor between 2.2 to 2.5.
- Иногда еще используется изоэластан (isoelastic) - другой зарегистрированный в качестве торговой марки сплав с Gage Factor около 3.5.
Тензодатчики полупроводникового типа, хотя и имеют большой коэффициент тензочувствительности, находят ограниченное применение из-за их высокой чувствительности и нелинейности характеристик (в чем-то аналогичных полупроводниковым термисторам).
5.3.1.2 Металлические тензометрические датчики (Strain Gage)
Как отмечалось выше, большинство тензодатчиков - металлические. Они могут быть двух типов: несвязанные и связанные. Несвязанный тензодатчик обычно используется для измерения деформации (или смещения) между неподвижной и подвижной конструкцией путем крепления к обоим конструкциям четырех металлических проводов таким образом, что два находятся в сжатии и два - в натяжении.
С другой стороны, в связанном деформационном датчике деформируемый элемент не связан проводами. При этом сам датчик находится на подложке, которая постоянно закрепляется на измеряемой конструкции с помощью клея. Чаще всего используются склеенные тензодатчики типа металлической фольги. Такие датчики изготавливается методом фотографического травления тонкораскатанного металлического проводника. Тонкие полоски фольги являются активными элементами тензодатчика, а толстые полоски фольги служат для обеспечения электрических соединений. Из-за большой площади толстой части их сопротивление мало и они не оказывают влияния на измерение сопротивления при деформации. Зато такой проводник увеличивает площадь для рассеивания тепла, кроме того становится проще соединить сигнальные провода с тензодатчиком.
Конструкция описанных типов тензодатчиков и варианты получения сигнала показана на рис. 5.5.
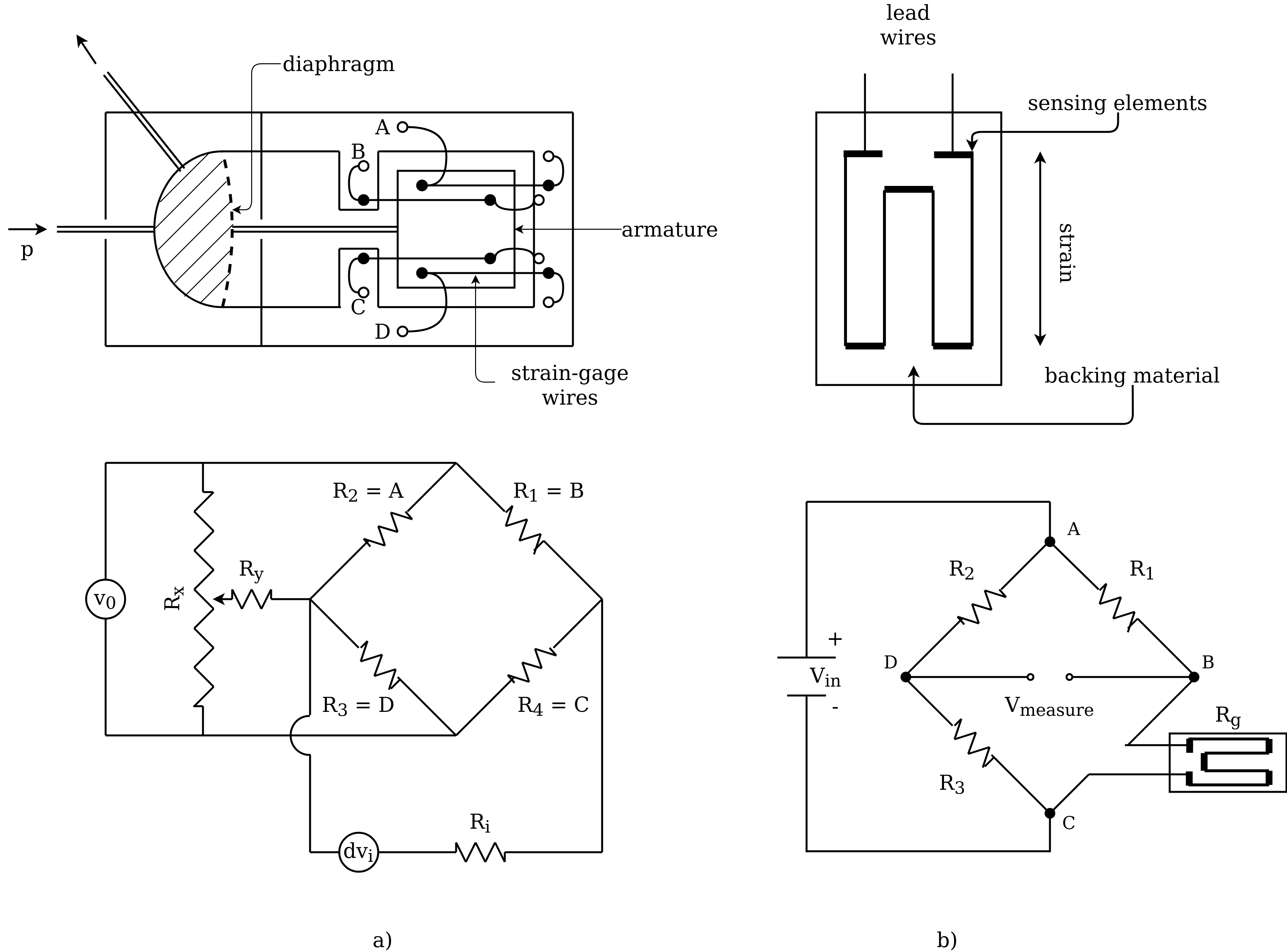
Рис. 5.5. Несвязанные (а) и связанные (б) металлические тензодатчики и варианты их подключения через мостовые схемы. На рис. 5.5. (а) показана схема измерения давления. Мембрана напрямую соединена арматурой с несвязным тензодатчиком. С увеличением давления увеличивается нагрузка на измерительную пару В и С, а на измерительную пару А и D - уменьшается. Для получения сигнала используется измерительный мост с четырьмя активными элементами (мост Уитстона, уже встречаемый нами ранее). Резистор \(R_y\) и потенциометр \(R_x\) используются для первоначальной балансировки моста, \(v_0\) - приложенное напряжение, а \(dv_i\) - выходное (измеряемое) напряжение на вольтметре или аналогичном устройстве с внутренним сопротивлением \(R_i\).
В свою очередь на рис. 5.5 (b) приведен связанный тензодатчик и вариант его подключения также через измерительный мост с постоянным балансирующим сопротивлением (например, \(R_g = R_1 = R_2 = R_3 = 200 \Omega\), когда нет напряжения).
Задача 5.1 Как Вы думаете, какой вариант на рис. 5.5 наиболее чувствительный и точный. Обоснуйте свой ответ.
Задача 5.2 Если на рис. 5.5 (b) \(R_g = R_1 = R_2 = R_3 = 200 \Omega\) при отсутствии давления, а само приложенное давление вызывает напряжение \(V_{in} = 50 mV\). То каким будет измеренное напряжение \(V_{measure}\), если размер датчика увеличился на 2%.
Учтите, что датчик на рис. 5.5 (b) может измерять деформацию только в одном направлении. Если мы хотим измерить деформацию в двух или более направлениях в одной и той же точке, то необходимо использовать розетку тензодатчиков. Она изготавливается путем укладки нескольких тензодатчиков в разных направлениях (на рис. 5.6 показана трехэлементная деформационная розетка, уложенная в стек под \(45^0\)).
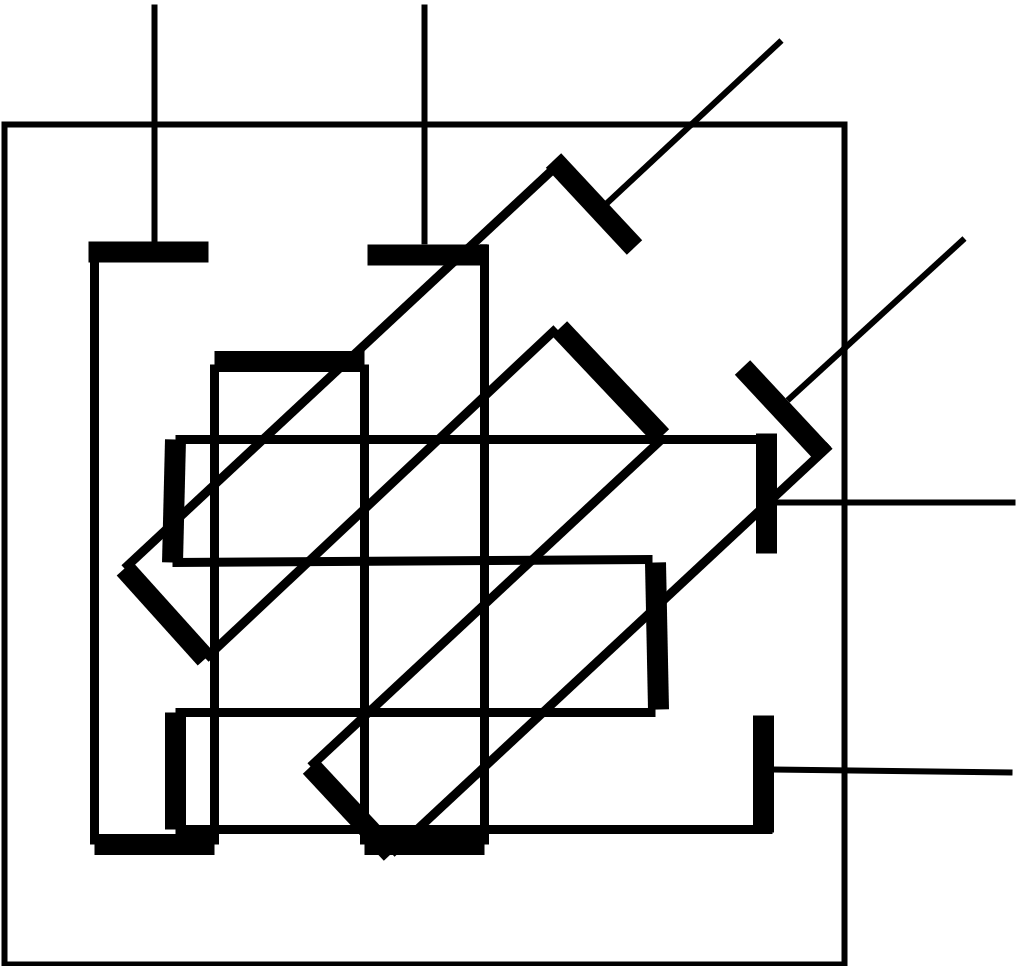
Рис. 5.6. Трехэлементный тензодачик, уложенный розеткой под углом $45^oC$ В заключение отметим, что материал подложки для тензодатчика должен удовлетворять нескольким важным свойствам:
- обладать высокой механической прочностью;
- обладать высокой диэлектрической проницаемостью;
- должен быть негигроскопичным (иначе поглощение влаги вызовет набухание и создаст локальную деформацию - т.е. систематическую погрешность).
Обычно в качестве подложки используют специально пропитанную бумага, стекловолокно и т.д. Крепежный материал, используемый для постоянной фиксации тензодатчика к конструкции также должен быть негигроскопичным (обычно используют эпоксидную смолу и целлюлозу).
5.3.1.3 Полупроводниковый тип тензодатчика (Strain Gage)
Тензопреобразователь полупроводникового типа изготавливается из тонкой кремниевой проволоки (обычно от 0,005 до 0,0005 дюйма и длиной от 0,05 до 0,5 дюйма). Такие датчики могут быть двух типов: p-типа и n-типа. В первом случае сопротивление увеличивается с положительной деформацией, а в последнем - уменьшается с температурой. Конструкция и типичные характеристики полупроводникового тензодатчика показаны на рис. 5.7.
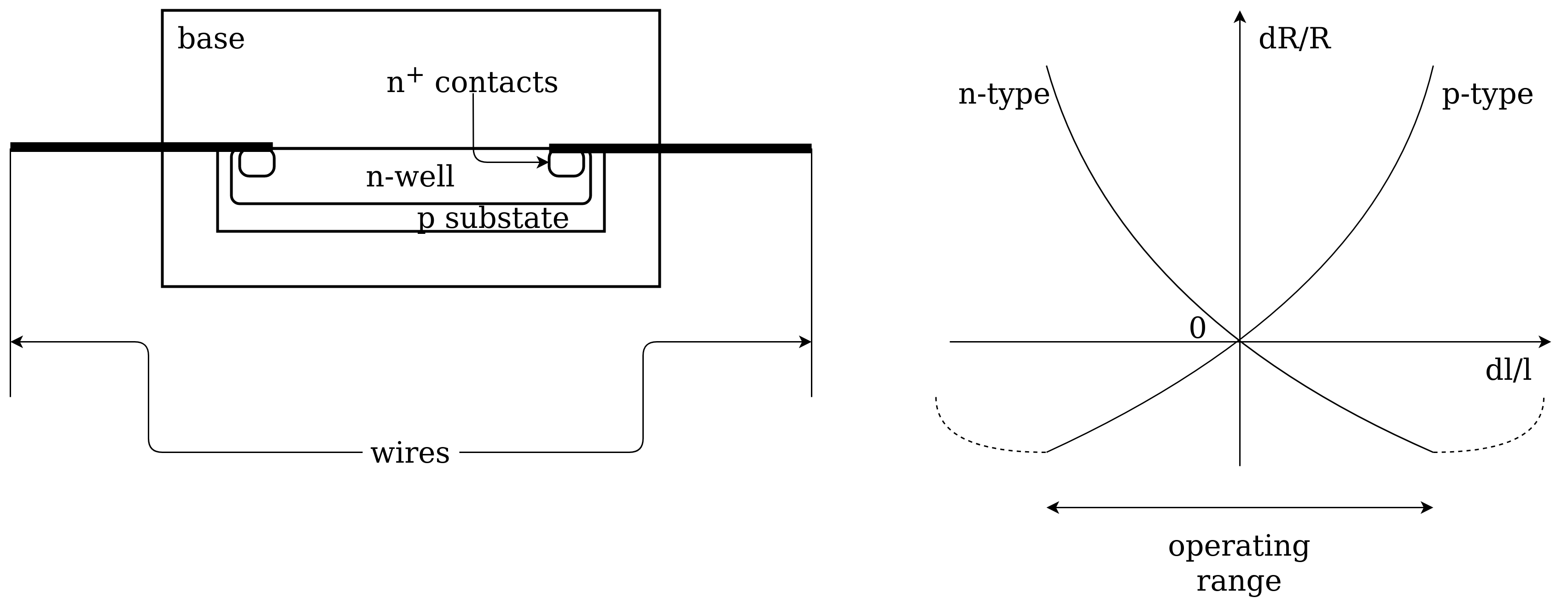
Рис. 5.7. Конструкция n-типа (a) и характеристики (b) полупроводникового тензодатчика. В настоящее время все большую популярность приобретают датчики давления MEMS. Они изготавливаются из небольшой кремниевой диафрагмы с установленными на ней четырьмя пьезорезистивными тензодатчиками. Подобные датчики оснащены встроенными контурами формирования сигнала и выдают напряжение, соответствующее приложенному давлению. Небольшой вес и малые габариты датчика делают его пригодным для измерения давления в специфических условиях применения.
5.3.1.4 Мост тензодатчиков (Strain Gage Bridge)
Еще раз подробнее рассмотрим мостовую схему для увеличения точности и чувствительности измерений. Для рассмотренных датчиков деформация является микроскопической (типичное значение: \(\frac{\Delta l}{l} = 1 \times 10^{-4}\)). В результате связанное с ним изменение сопротивления тоже мало, как и его линейный диапазон измерений. При этом если один тензодатчик подключен к измерительному мосту (Wheatstone bridge) с тремя фиксированными сопротивлениями, то выходное напряжение моста тоже будет линейным (выходное напряжение моста будет линейно изменяться с \(\frac{\Delta R}{R}\) , если \(\frac{\Delta R}{R}\) не превысит 0,1) (рис. 5.5 (b)).
При этом в реальных мостовых схемах, как правило, никогда не используется один тензодатчик - это связано не с улучшением линейности, а с получением идеальной температурной компенсации. Таким образом, если в нашем случае находится один тензодатчик в мосте с тремя плечами с фиксированным сопротивлением (рис. 5.5 (b)), то из-за повышения температуры, сопротивление тензодатчика будет изменяться. Это приведет к разбалансировке моста и даст ошибочный сигнал (даже если деформация датчика отсутствет). С другой стороны, если используется два одинаковых тензодатчика для одного моста (на соседних плечах, один на сжатие, другой на растяжение) - температурная компенсация может быть достигнута. Изменение температуры будет в равной степени влиять на сопротивления тензодатчиков и это обеспечит баланс моста при отсутствии деформаций. Такая конфигурация моста называется "push-pull". Еще одним преимуществом такого решения является повышение чувствительности.
Фактически, все четыре рычага моста могут быть сформированы из активных тензодатчиков. Это позволит еще больше повысить чувствительность, сохраняя при этом свойство температурной компенсации (рис. 5.5 (а)) (именно так, например, делается в точных аналитических весах, измеряющих величины с точностью до 0.0001 г).
Можно показать, что если сопротивления тензодатчиков одинаковы и равны коэффициенту тензочувствительности \(G\), то несбалансированное напряжение будет равно
$$ e_0 = \frac{EG}{4}(\epsilon_1 + \epsilon_3 - \epsilon_1) $$где \(\epsilon_1, \epsilon_2, \epsilon_3, \epsilon_4\) - это деформации, созданные с соответствующими знаками (\(\epsilon = \frac{\Delta l}{l}\))
Примечание. Измерительные мосты применяются для измерения/балансировки электрического сопротивления (относятся к одинарным мостам). Далее приведены основные расчеты для моста (перед глазами нужно держать рис. 5.5 (b) и задачу 5.2.)
Итак, принято считать, что ток течет от + к - (хотя электронны движутся от - к + и несут с собой отрицательный заряд...) и проходить он будет по 2 путям: \(A-B-C\) и \(A-D-C\) (считаем, что сопротивление вольтметра велико настолько, что точки \(D-B\) не соединены). Тогда если \(\phi_A, \phi_B, \phi_C, \phi_D\) - потенциалы соответствующих точек, то напряжения между точками \(A-C\) и \(D-B\) равно
$$U_{AC} = \phi_A - \phi_C $$
$$U_{DB} = \phi_D - \phi_B $$И сопротивление участков \(A-B-C\) и \(A-D-C\) равны:
$$R_{ABC} = R_1 + R_g$$
$$R_{ADC} = R_2 + R_3$$Тогда по закону Ома токи на участках \(A-B-C\) и \(A-D-C\)
$$I_{ABC} = \frac{U_{AC}}{R{ABC}} = \frac{U_{AC}}{R_1 + R_g}$$
$$I_{ADC} = \frac{U_AC}{R_{ADC}} = \frac{U_{AC}}{R_2 + R_3}$$А напряжение на участках \(D-C\) и \(B-C\):
$$U_{DC} = I_{ADC}R_2$$
$$U_{BC} = I_{ABC}R_g$$Потенциалы в точках B и D выражаются как:
$$\phi_D = \phi_C + U_{DC} = \phi_C + I_{ADC}R_2$$
$$\phi_B = \phi_C + U_{BC} = \phi_C + I_{ABC}R_g$$Тогда напряжение \(D-B\) будет:
$$\begin{align}U_{DB} & = \phi_D - \phi_B \\ & = (\phi_C + I_{ADC}R_2) - (\phi_C + I_{ABC}R_x) \\ & = I_{ADC}R_2 - I_{ABC}R_g \\ & = \frac{U_{AC}}{R_2 + R_3} \dot R_2 - \frac{U_{AC}}{R_1 + R_g} \dot R_g \end{align}$$При этом если мост сбалансирован, то:
$$0 = U_{DB} = \frac{U_{AC}}{R_2 + R_3} \dot R_2 - \frac{U_{AC}}{R_1 + R_g} \dot R_g$$
$$\frac{R_2}{R_2 + R_3} = \frac{R_g}{R_1 + R_g}$$
$$R_g = \frac{R_2 R_3}{R_1} $$5.3.2 Нагрузочная ячейка (Load Cell)
Нагрузочные ячейки широко используются для измерения силы. По своей сути - это комбинация тензодатчиков на упругом металлическом корпусе. Одним из наиболее распространенных способ измерения действующей силы на данную систему является весовой мост (weigh bridge, рис. 5.8). С точки зрения измерительных цепей - это мост Уитстона, где все 4 сопротивления являются тензодатчиками: два измеряют продольную деформацию (при сжатии ячейки они сжимаются), а два других - поперечную (при сжатии ячейки они растягиваются, рис. 5.8).
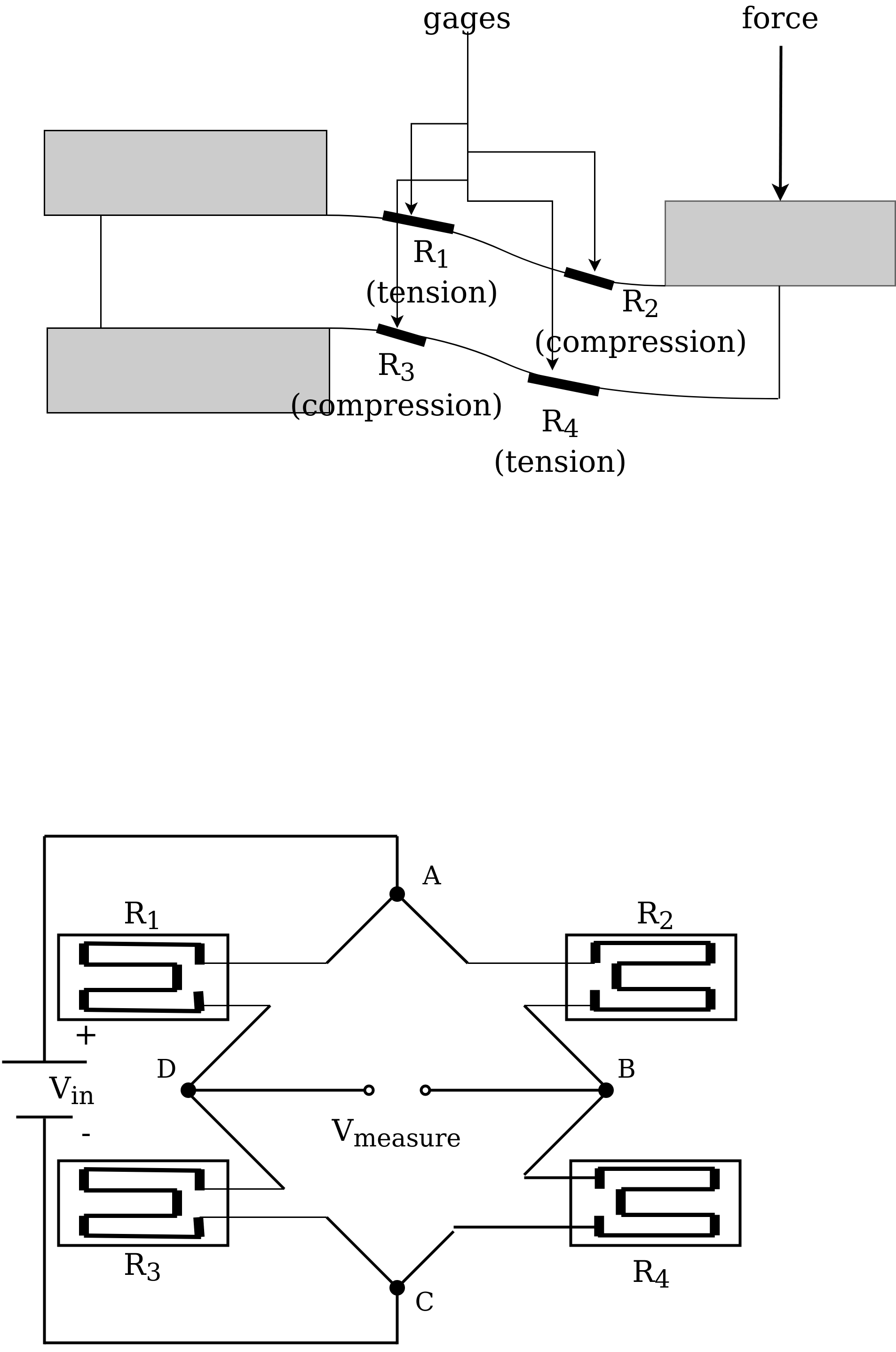
Рис. 5.8. Пример и схема нагрузочной ячейки (Load cell) с 4 тензодатчиками. Тензодатчики, измеряющие одинаковую деформацию (скажем, растяжение) располагают на противоположных плечах моста, в то время как соседние плечи моста должны измерять противоположные деформации. Если тензодатчики идентичны по характеристикам, то это обеспечит не только идеальную температурную компенсацию, но и максимально достижимую чувствительность.
Сама деформация в случае весового моста задается уравнением:
$$ \epsilon = \frac{\nu F}{AE} $$где \(F\) - приложенная сила, \(A\) - площадь поперечного сечения, \(E\) - модуль Юнга для эластичного материала, \(\nu\) - соотношение Пуассона.
5.3.3 Удостоверяющее кольцо (Proving Ring).
Еще одним распространенным типом датчиков для измерения силы воздействия являются удостоверяющие кольца. Данный тип устройств зачастую используется для проверки действующе силы. Удостоверяющие кольца могут использоваться для измерения как сжимающих, так и растягивающих усилий. Преимущество удостоверяющего кольца заключается в том, что благодаря его конструкции можно развить бОльшую деформацию по сравнению с тензодатчиком и проводить измерения в более широких диапазонах (рис. 5.9).
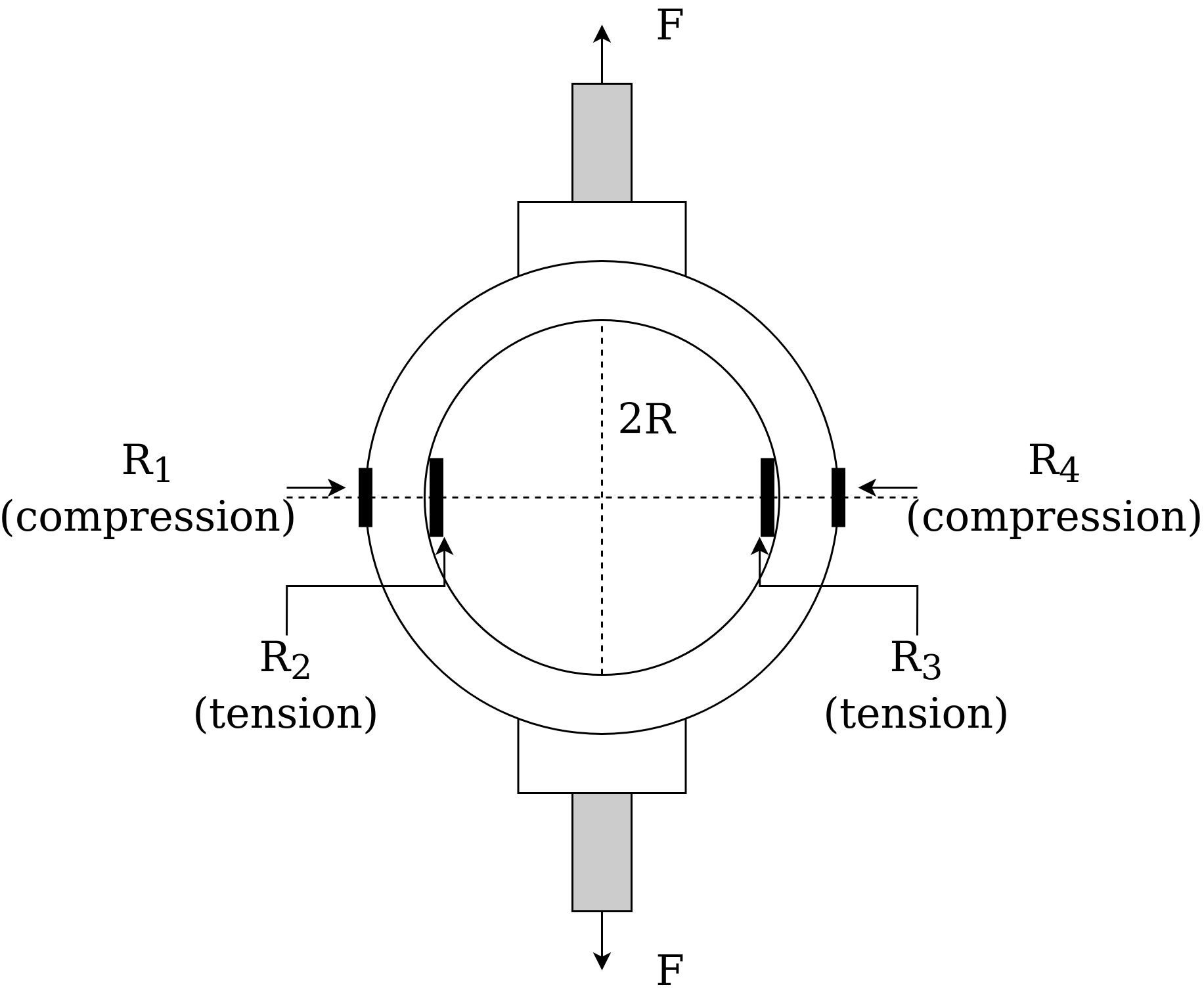
Рис. 5.9. Удостоверяющее кольцо. Кольцо состоит из полого цилиндрического стержня радиуса \(R\), толщины \(t\) и осевой ширины \(b\). Измеряемое усилие прикладывается к специальным площадкам, закрепленным с двух сторон удостоверяющего кольца. Четыре тензодатчика установлены на стенках испытательного кольца: два - на внутренней стороне и два - на внешней стороне (опять мост Уинстона, аналогичный предыдущему разделу). При воздействии на кольцо 2 датчика сжимаются (\(- \epsilon\)), в то время как датчики 1 и 3 - растягиваются (\(+ \epsilon\)). Величина деформации в таком случае задается выражением:
$$ \epsilon = \frac{1.08 FR}{Ebt^2} $$5.3.4 Кантиливерная балка (Cantilever Beam)
С такими устройствами мы уже сталкивались в курсе когда рассматривали нагрузочные ячейки. По сути, кантиливерная балка является частным случаем нагрузочной ячейки (раздел 5.3.2). Такая конструкция может использоваться для измерения веса до 10 кг. Один конец балки является жестко закрепленным, а на другой (свободный) прилагается нагрузка (рис. 5.8).
Задача. Подумайте, как еще можно расположить тензодатчики?
Напряжение на фиксированном конце выражается как:
$$ \epsilon = \frac{6Fl}{Ebt^2} $$где:
\(l\) - длина балки
\(t\) - толщина кантиливера
\(b\) - ширина балки
\(E\) - модуль Юнга для материала.
Создаваемую деформацию можно измерить, закрепив тензодатчики на фиксированном конце: два на верхней стороне балки (растяжение) и два на нижней (сжатие).
5.4. Заключение
В этой главе мы изучили наиболее часто встречающиеся типы сенсоров для измерения давления и силы. Мембраны используются для непосредственного измерения давления газов или жидкостей на систему (сигнал преобразуется в смещение, а затем, с помощью тензодатчиков или других сенсоров - в сопротивление или другой электрический сигнал).
С другой стороны, мы рассмотрели тензодатчики и их различные комбинации для измерения воздействующей силы. На примере удостоверяющих колец, нагрузочных ячеек и кантиливерных балок мы разобрали как с помощью тензодатчиков измеряют действующие на систему силы. Кроме того мы повторили устройство измерительных мостовых схем, которые позволяют добиться температурной компенсации и увеличить чувствительность измерений.
Задания для проверки
- Какой из эластичных датчиков: сильфоны, тонкая пластина или гофрированная мембрана, может использоваться для измерения высокого давления?
- Сильфоны обычно используются в сочетании с пружиной, почему?
- Объяснить конструкцию и принцип работы трубы Бурдона для измерения давления.
- Определите коэффициент деформации датчика. Какие материалы обычно используются для изготовления тензодатчиков? Какой из них имеет максимальный коэффициент замера (gage factor)?
- Что такое розетка тензодатчиков?
- \(120 \Omega\) тензодатчик с коэффициентом тензочувствительности 2.0 подвергается деформации равной \(1 \times 10^{- 6}\). Найдите как изменилось сопротивление тензодатчика.
- Расскажите, каким образом можно компенсировать температурный эффект в тензодатчике?
Ссылки на литературу
- D. M. Ştefănescu, "Strain gauges and Wheatstone bridges — Basic instrumentation and new applications for electrical measurement of non-electrical quantities," Eighth International Multi-Conference on Systems, Signals & Devices, Sousse, 2011, pp. 1-5.
- Instrumentation today
- Keller, Oliver. (2015). Visualisation of Radioactivity in Real-Time on a Tablet Measured by a Hybrid Pixel Detector. 10.13140/RG.2.2.17343.71848.
- Fleming, Andrew. (2013). A review of nanometer resolution position sensors: Operation and performance. Sensors and Actuators A: Physical. 190. 106–126. 10.1016/j.sna.2012.10.016.
- NIST
6. Смещение и скорость (Displacement and Speed Measurement)
6.1 Введение
Смещение и скорость - это два важных параметра, измерения которых важны во многих промышленных системах (например в схемах позиционирования и управления).
Измеряемое типичными сенсорами смещение может быть в диапазоне от нескольких мкм до нескольких см. Кроме того, существует как контактное, так и бесконтактное измерение. Само же смещение может быть линейным или угловым (поворотным). Это же верно и в случае измерения скорости.
В результате освоения данной главы, неплохо было бы уметь:
- Назвать три метода измерения смещения с помощью пассивных электронных датчиков.
- Набросать конструкцию и характеристики LVDT.
- Объяснить принципы работы индуктивных и емкостных типов датчиков приближения.
- Различить емкостные датчики смещения с переменным расстоянием и переменной площадью.
- Объяснить принцип действия оптического датчика смещения.
- Назвать два метода бесконтактного измерения скорости вращения и объяснить принципы их работы.
6.2 Измерение смещения (displacement measurement)
Если мы хотим измерить некое смещение системы в пространстве, то можно использовать два типа измерения: контактное и бесконтактное. При этом принцип измерения можно разделить на две категории: электронное и оптическое. При электронном измерении используются пассивные электронные датчики, измеряющие индуктивность или емкость (inductance or capacitance). С другой стороны, оптический метод работает по принципу изменения интенсивности света в зависимости от расстояния.
Далее мы сознательно не будем отмечать диапазон измерений смещений для рассматриваемых сенсоров, т.к. он в основном зависит от используемой "механики" (т.е. всегда можно пропорционально увеличить или уменьшить размер измеряемых величин, используя конструкцию из рычагов и т.п.).
6.2.1 Потенциометр (potentiometer)
Потенциометры являются самым простыми измерителями смещения. Они могут использоваться как для линейного, так и для углового измерения перемещений (рис. 6.1).
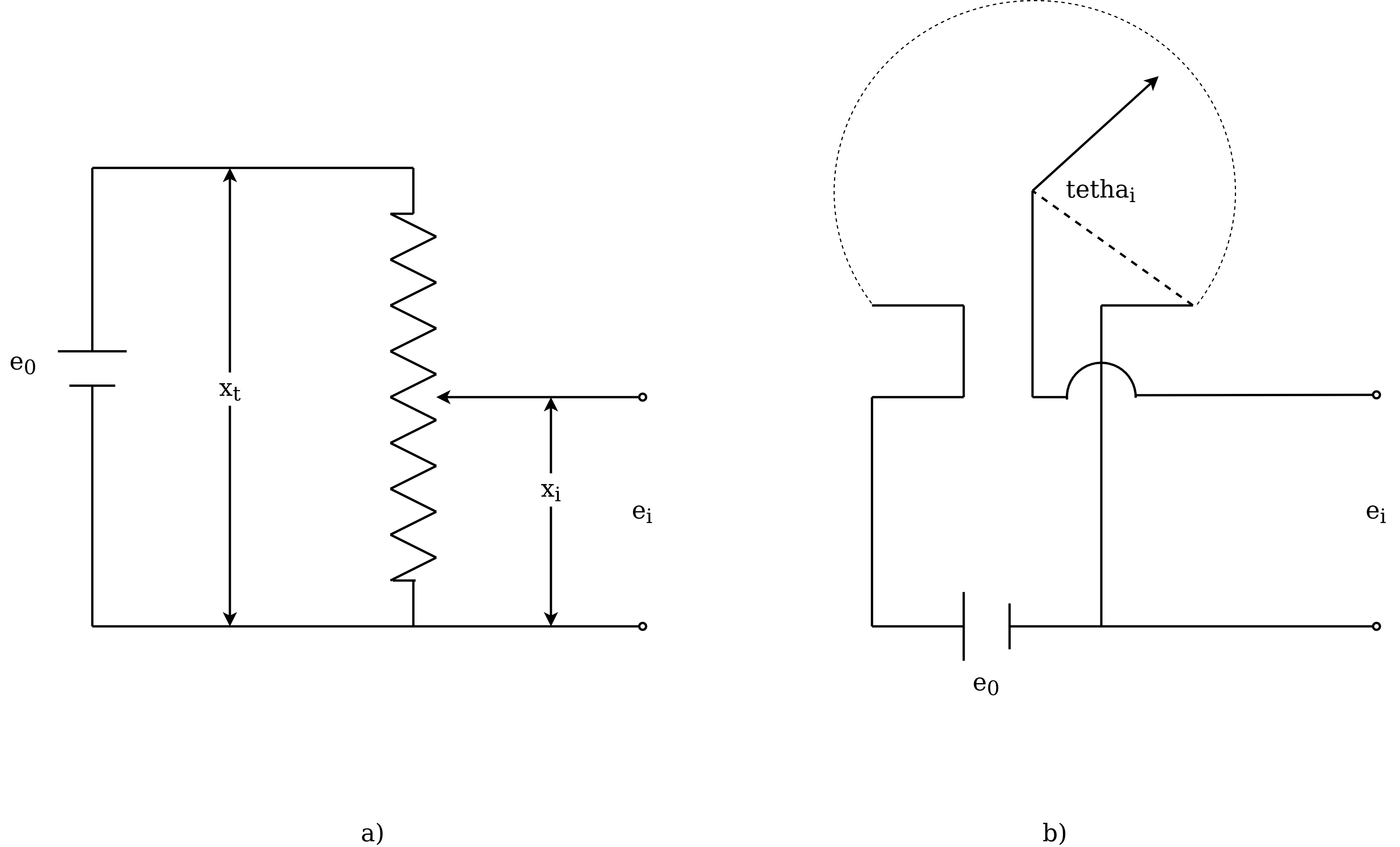
Рис. 6.1. Потенциометр: a) - линейный, b) - поворотный Подобные сенсоры являются резистивными датчиками (transducers, т.е. меняют свое сопротивление в ответ на воздействие). Тогда выходное напряжение после такого датчика будет пропорционально смещению согласно формуле:
$$ e_i = \frac{x_i}{x_t} e_0 $$где
\(x_i\) - приложенное смещение, \(x_t\) - общее смещение и \(e_0\) - питающее напряжение.
Основной проблемой потенциометров является проблема наличия контакта, возникающая в результате износа (есть подвижные детали, а значит будет быстрый износ). В результате, несмотря на простоту, применение потенциометров в промышленности весьма ограничено.
6.2.2 Линейный дифференциальный трансформатор (ЛДТ, Linear Variable Differential transformer, LVDT)
LVDT работает по принципу вариации взаимной индуктивности. Его конструкция состоит из трех неподвижных соосных обмоток (показаны коричневым на рис. 6.2) и подвижного ферромагнитного сердечника на оси трансформатора (показан синим). Сердечник короче чем длина всего трансформатора, поэтому при его перемещении меняется коэффициент магнитной связи обмоток и, следовательно, получаемый наведенный ток на обмотках. На центральную обмотку подается напряжение возбуждения, с боковых обмоток снимается наведенный сигнал, пропорциональный положению сердечника.
Это один из самых популярных типов датчиков смещения. Кроме того он имеет хорошую линейность в широком диапазоне перемещений. При этом масса подвижного тела мала, а сама подвижная часть не соприкасается с неподвижной деталью, что минимизирует сопротивление трения и вероятность выхода из строя датчика. Коммерческие LVDT доступны с полным диапазоном перемещения от \(\pm 1,25\) мм до \(\pm 250\) мм. Благодаря малой инерции сердечника, LVDT обладает хорошими динамическими характеристиками.
Конструкция и принцип работы LVDT приведены на рис. 6.2.
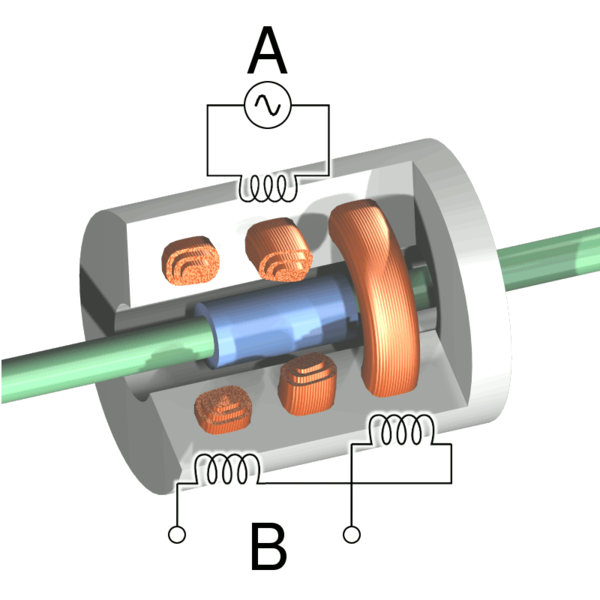
Рис. 6.2. Linear Variable Differential transformer (LVDT) и Последовательное соединение вторичных обмоток (изображение взять с сайта wikipedia.org и распространяется по лицензии CC BY-SA 3.0). Как уже отмечалось выше, устройство работает по принципу изменений взаимной индуктивности между двумя катушками в зависимости от смещения ферритового сердечника. Датчик состоит из первичной обмотки и двух одинаковых вторичных обмоток трансформатора, намотанных на полый цилиндр (tubular former). Внутри цилиндра движется сердечник из ферромагнитного отожженного никель-железного сплава (феррит).
Две вторичные обмотки соединены последовательно друг с другом и выходное напряжение является разностью напряжений между ними:
$$ e_{out} = e_1 - e_2 $$Первичная обмотка возбуждается источником переменного напряжения 1-10 В (r.m.s. A.C.), частота возбуждения находиться в диапазоне от 50 Гц до 50 КГц. При этом возможно 2 случая:
- Выходное напряжение равно нулю, когда сердечник находится в центральном положении (напряжение, наведенное в обеих вторичных обмотках, одинаковое и поэтому разница равна нулю).
- Напряжение возрастает по мере удаления сердечника от центрального положения, в любом направлении.
Таким образом, по измерению только выходного напряжения невозможно предсказать направление движения сердечника.
Для возможности определения направления движения используют фазовый чувствительный детектор (phase sensitive detector, PSD). Он подключается на выходе LVDT и сравнивает фазу выхода с первичным сигналом для определения направления движения. На выходе из фазового чувствительного детектора получаем постоянное напряжение (после фильтрации низких частот, рис. 6.3). При этом зависимость напряжения от смещения будет линейной.
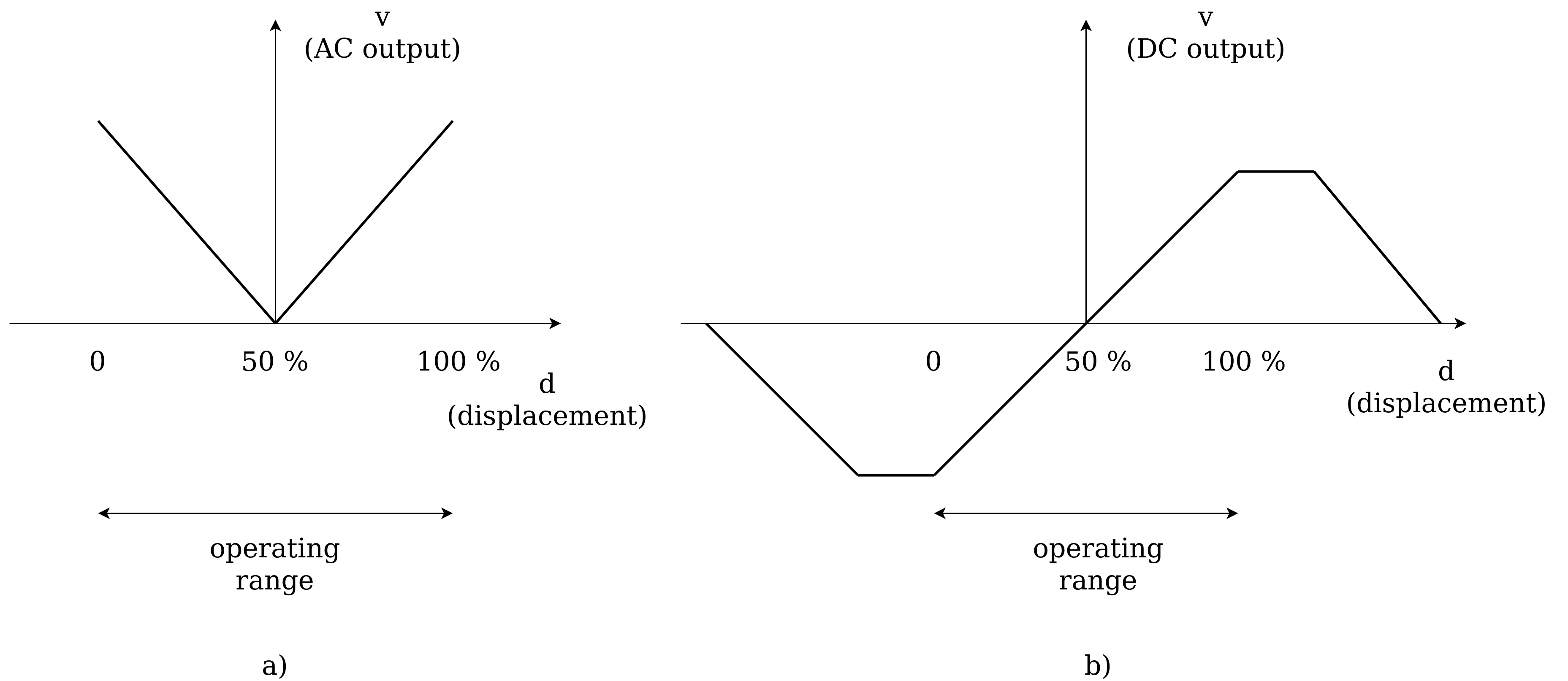
Рис. 6.3. Выходное напряжение по отношению к характеристикам перемещения LVDT до (a) и после (b) фазочувствительного обнаружения. Тем не менее описанный тип датчиков обладает рядом недостатков:
- Чувствительность к наведенным магнитным полям.
- Чувствительность к вибрациям.
- Чувствительность к температуре.
Задача 6.1. На основании раздела 6.2.2 и информации в сети, составьте список плюсов LVDT.
Задача 6.2. Предложите схему для компенсации влияния температуры на показания LVDT по аналогии с датчиками давления.
6.2.3 Индуктивные датчики (Inductive type Sensors)
Рассмотренные в предыдущей главе LVDT работает по принципу изменения общей наведенной индуктивности (mutual inductance). С другой стороны существую индуктивные датчики, которые работают по принципу изменения исключительно собственной индуктивности. Часто они используются для оценки близости двух металлических объектов (рис. 6.4).
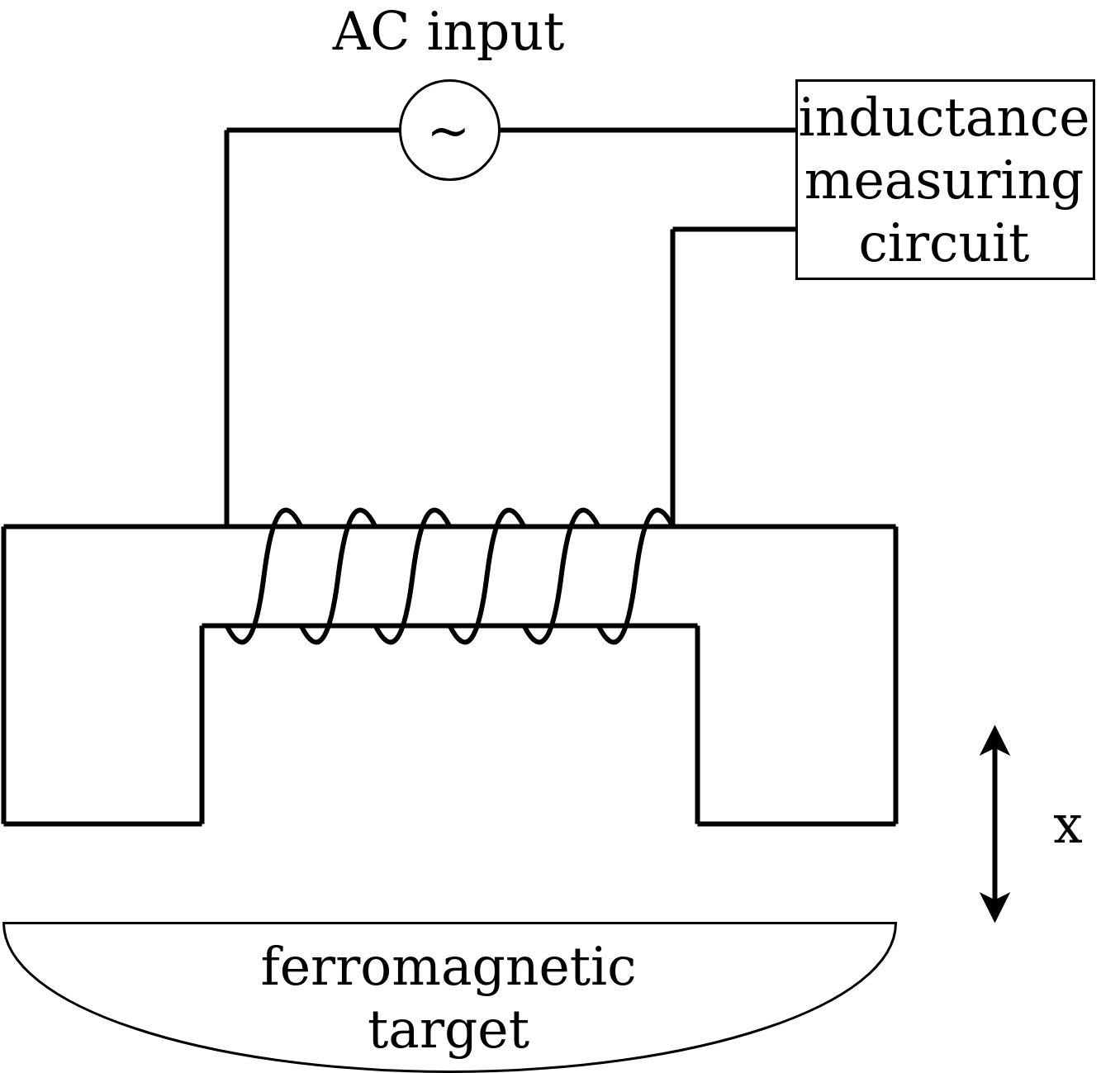
Рис. 6.4. Датчик близости на основе изменения собственной индуктивности. В этом случае индуктивность катушки меняется по мере того, как ферромагнитный объект движется вблизи магнитного носителя (металл), изменяя таким образом сопротивление магнитного поля (magnetic path). Измерительная цепь (inductance measuring circuit) такого датчика обычно представляет собой мост переменного тока (AC bridge).
6.2.4 Ротационный дифференциальный трансформатор с переменной величиной (rotary variable differential transformer, RVDT)
Его конструкция аналогична конструкции LVDT, за исключением того, что сердечник спроектирован таким образом, что при его движении взаимная индуктивность между обмотками изменяется линейно с угловым смещением (рис. 6.5).
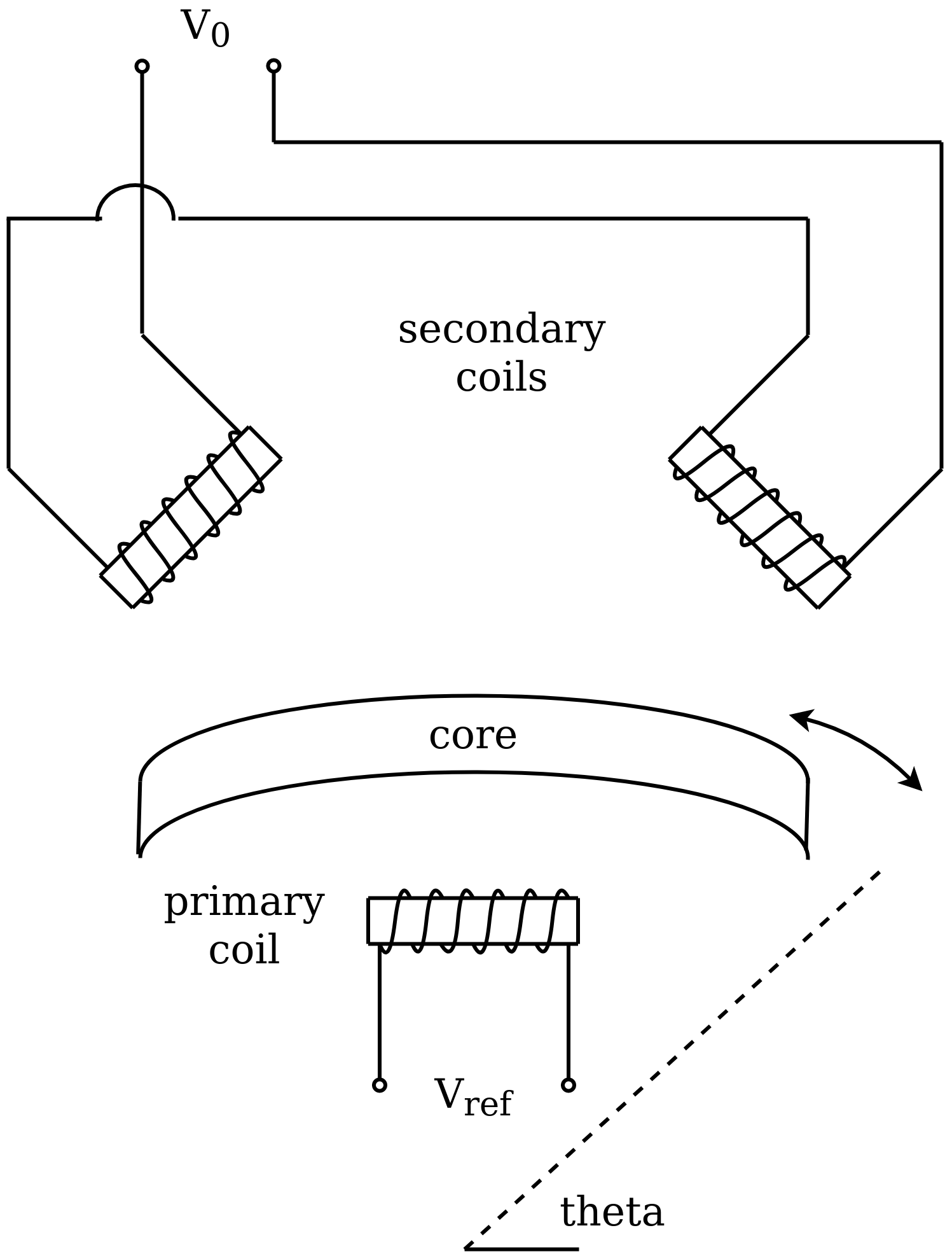
Рис. 6.5. Rotary Variable Differential Transformer (RVDT). 6.2.5 Вращающийся трансформатор с возбуждающей обмоткой на роторе (Ресольвер, Resolver)
Ресольвер также работают по принципу изменения взаимной индуктивности и широко используются для измерения вращательного движения. Основная конструкция показана на рис. 6.6.
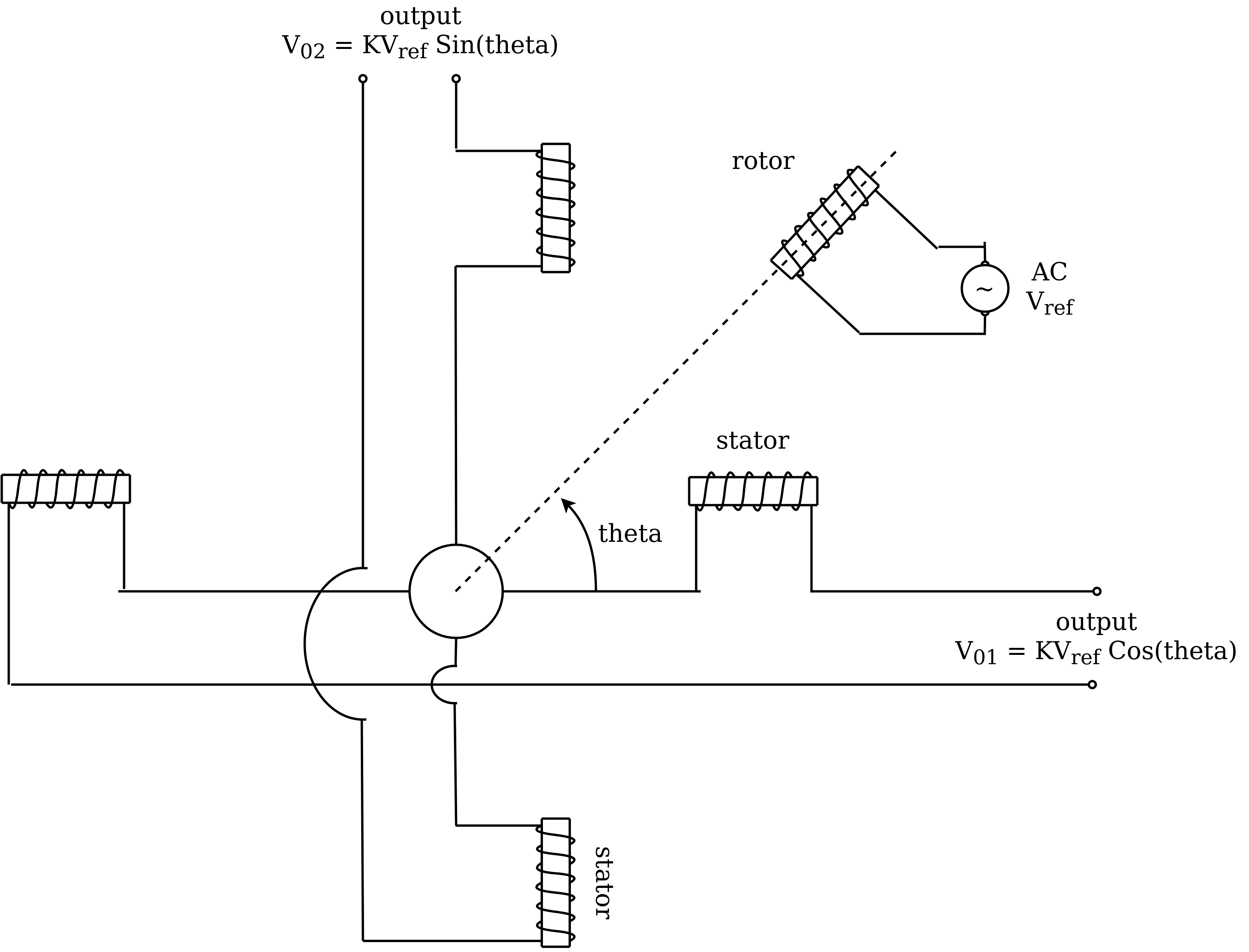
Рис. 6.6. Схема ресольвера. Ресольвер состоит из ротора, содержащего первичную обмотку и двух обмоток статора (с одинаковым количеством витков), расположенных перпендикулярно друг другу. Ротор крепится непосредственно к объекту, вращение которого измеряется. Если подаваемое AC напряжение на роторе равно \(V_r\), то индуцированное напряжение на двух обмотках статора составит:
$$ \nu_{01} = KV_r cos \Theta $$$$ \nu_{02} = KV_r sin \Theta $$где
\(K\) - константа.
Путем измерения описанных напряжений можно однозначно определить угловое положение (\(0 \le \Theta \le 90^o\)). Фазовая чувствительность необходима, если мы хотим измерить углы во всех четырех квадрантах и понимать в каком квадранте мы сейчас измеряем положение.
Примечание. Аналогично рассмотренному датчику работают сельсины (synchros), которые широко используются в качестве датчиков ошибок в системах позиционного регулирования. Кому интересно - может посмотреть в интернете.
6.2.6 Датчики емкости (Capacitance Sensors)
Датчики емкостного типа являются универсальным и выпускаются в различных размерах и формах. При этом они могут измерять очень маленькое смещение (порядка микрометров), что успешно используется в сенсорных экранах современных телефонов. Часто весь датчик изготовлен на кремниевом основании и интегрирован в технологическую схему в виде отдельной маленькой микросхемы. Думаю, что Вы догадываетесь о принципе работы подобных датчиков (мы ведь измеряем емкость, а значит - говорим о конденсаторах). Для использования различных режимов работы такого датчика необходимо учитывать емкость, формируемую диэлектриком между двумя проводящими параллельными пластинами. Емкостное сопротивление между пластинами задается формулой:
$$ C = \frac{\epsilon_r \epsilon_0 A}{d} $$где
\(A\) - площадь пластин
\(d\) - расстояние между пластинами
\(\epsilon_r\) - относительная диэлектрическая проницаемость диэлектрика (его пропускная способность, permittivity)
\(\epsilon_0\) - абсолютная диэлектрическая проницаемость в вакууме = \(8.854 \dot 10^{-12} \frac{F}{m}\)
Емкостной датчик может быть сформирован по принципу изменения:
- разделяющего пространства (\(d\)),
- площади пластин (\(A\)),
- диэлектрической проницаемости диэлектрика (\(\epsilon_r\)).
Сенсоры для измерения смещения обычно основаны на первых двух принципах, в то время как принцип переменной диэлектрической проницаемости используется для измерения влажности, уровня и др. На рис. 6.7 показаны схематические конструкции датчиков измерения емкости с переменным расстоянием и переменной площадью.
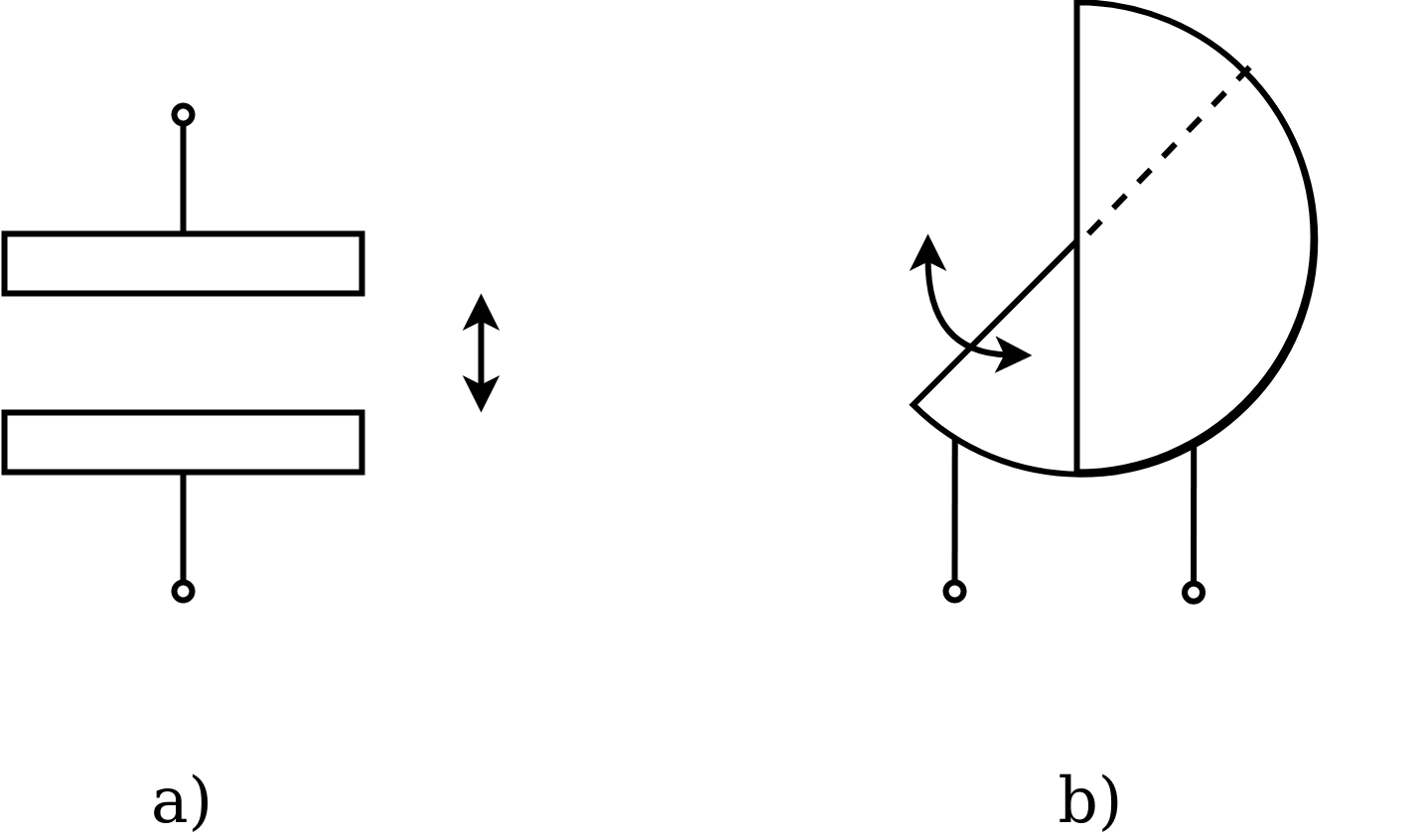
Рис. 6.7. Емкостные датчики смещения с вариацией a) разделяющего пространства, b) площади пластин проводника. Емкостной датчик с переменным типом площади выдает линейные изменения емкости с входной переменной, в то время как датчик с переменным типом разделения имеет обратную зависимость от входящего смещения (\(\frac{1}{x}\)).
Емкостные датчики также используются как сенсоры приближения (рис. 6.7).
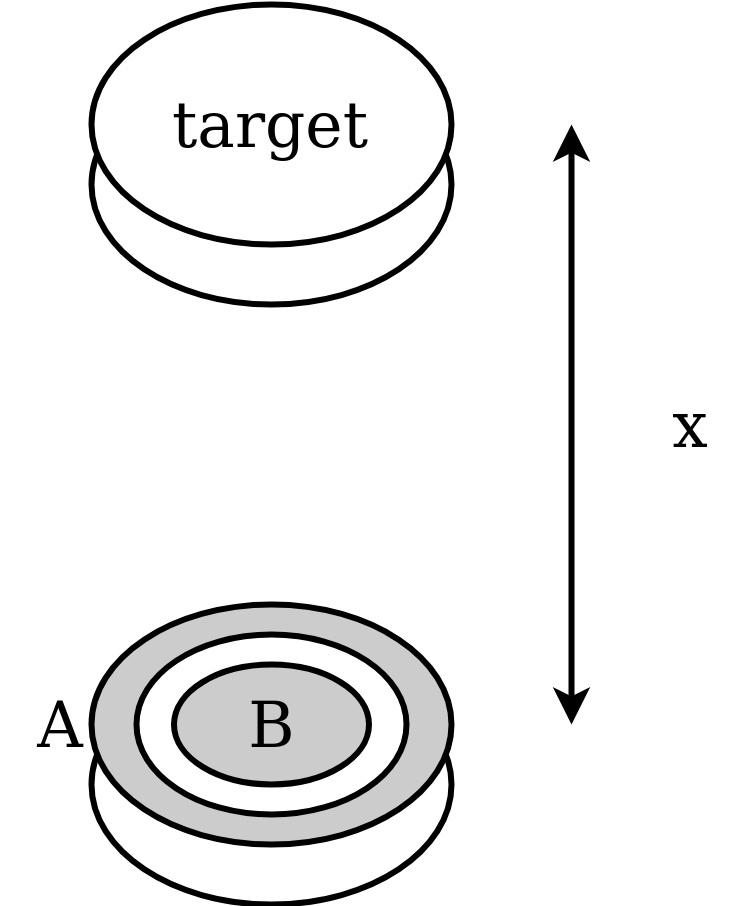
Рис. 6.7. Схематичное изображение емкостного датчика близости. Измерительная часть датчика состоит из двух электродов: один круглый (В), а другой - кольцеобразный (А). Электроды разделены небольшим диэлектрическим промежутком. При попадании предмета в пределы измерительной части датчика, емкость между пластинами А и В изменяется. Разница может быть точно измерена при сравнении с емкостью фиксированного (эталонного) конденсатора.
Подобные сенсоры имеют небольшие размеры, бесконтактны и могут обнаруживать присутствие металлических или изолирующих (indulating) объектов в диапазоне около 0-5 см. Для обнаружения изолирующих объектов диэлектрическая постоянная такого объекта должна быть значительно больше чем диэлектрическая постоянная материала, разделяющего А-В.
Измерительные цепи для емкостных датчиков, как правило, являются емкостными мостами (аналогично рассмотренным ранее измерительным мостам по сопротивлению). При этом изменение емкости подобных сенсоров очень мало (несколько pF, в некоторых случаях даже меньше). Изменения такого порядка с трудом возникают и детектируются при наличии большой блуждающей емкости (которая обычно присутствует в промышленных системах). Кроме того полученный сигнал будет содержать много помех. Для минимизации всех описанных негативных влияний датчик должен быть тщательно спроектирован и экранирован. Это же касается и самой измерительной схемы (measuring circuit).
6.2.7 Оптические датчики (optical sensors)
Следующий тип сенсоров работает по принципу уменьшения интенсивности света с увеличением расстояния. Таким образом, если источник света и детектор зафиксированы, то количество задетектированного света (отраженного от движущейся поверхности) будет зависеть от расстояния и скорости движения измеряемой поверхности. Оптические сенсоры весьма капризны и требуют тщательной калибровки, поскольку количество полученного света зависит от отражательной способности поверхности, интенсивности излучения источника и т.д. Тем не менее, подобный датчик обеспечивает простой метод измерения смещения. В конструкции подобных устройств часто используются оптические волокна (optical fibers, рис. 6.9).
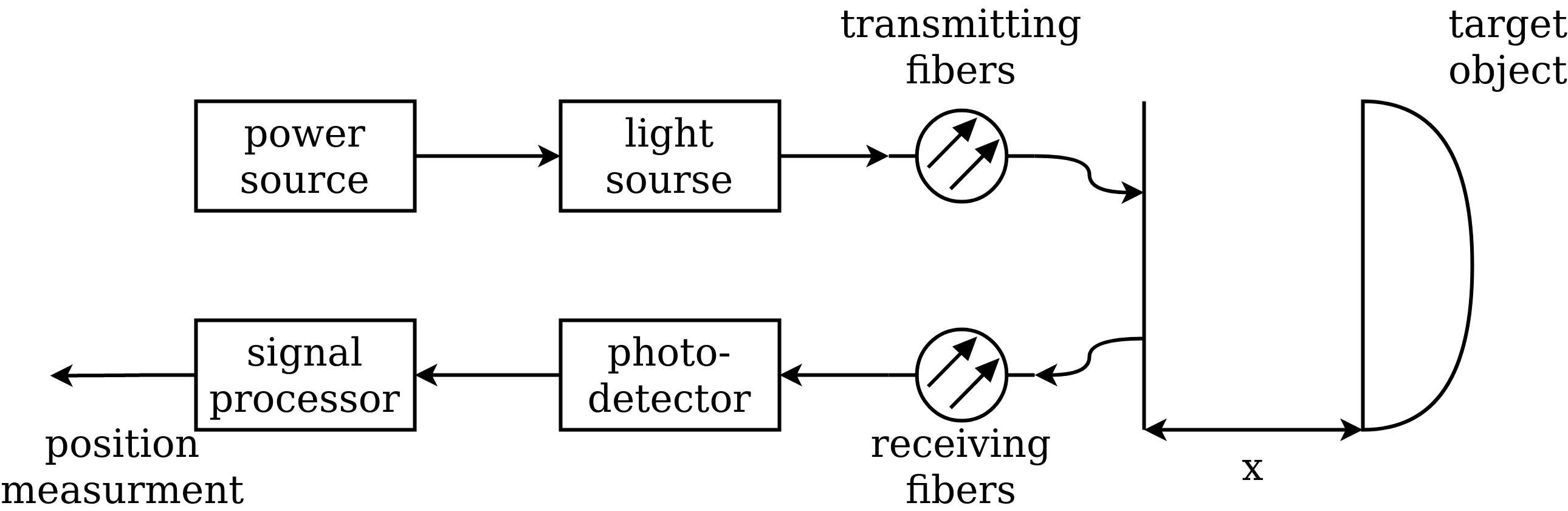
Рис. 6.9. Оптоволоконный сенсор определения близости. В приведенном датчике используется 2 пучка волокон: одно передает свет от источника на измеряемую поверхность, другое - принимает отраженный свет и передает его в фотодетектор. Источниками света могут быть лазеры или светодиоды, а детекторами - фотодиоды (photodiodes) или фототранзистры (phototransistors).
6.3 Измерение скорости
Мы рассмотрели большое количество различных датчиков измерения расстояния и многие из них обладает хорошими динамическими характеристиками, что позволяет использовать их для измерения скорости. Однако для этого требуется перевести скорость в более удобную форму для измерений.
Самым простым способом измерить скорость является измерение скорости вращения (переводим поступательную скорость во вращательную через специальные механизмы). Для этого нужно поместить на вращающемся валу электрический генератор (tachogenerator) и измерить вырабатываемое им напряжение (которое будет пропорционально скорости). Однако, это измерение контактного типа (со всеми вытекающими минусами и рисками выхода из строя). Но существуют и другие - бесконтактные способы. Одним из них является оптический метод (рис. 6.10)
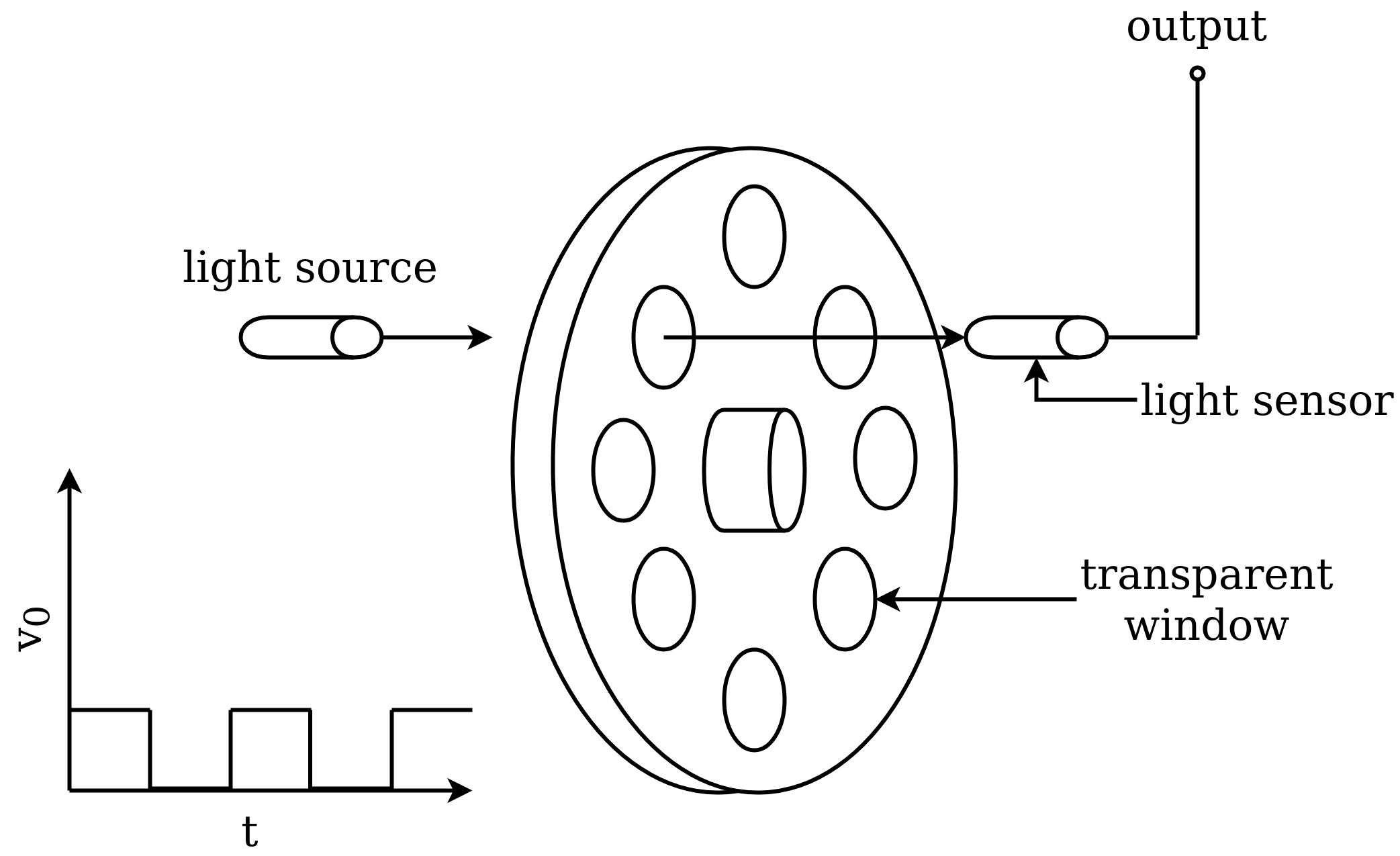
a)

b)Рис. 6.10. Оптический датчик скорости: a) схема; b) пример такого датчика для определения скорости конвейерной ленты. Для оптического измерения скорости вращения на валу (частота вращения которого должна быть измерена), устанавливается непрозрачный диск с перфорацией через равные интервалы (прозрачные окна). С одной стороны диска устанавливается источник света, а с другой - фотоприемник, который обнаруживает проходящий свет. Детектируемый сигнал будет формировать квадратную волну, частота которой будет определяться скоростью вала и количеством прозрачных отверстий на диске.
Однако не только оптическая схема может использоваться для изменения скорости. На рис. 6.11 приведена другая схема измерения - датчик переменного сопротивления (variable reluctance).
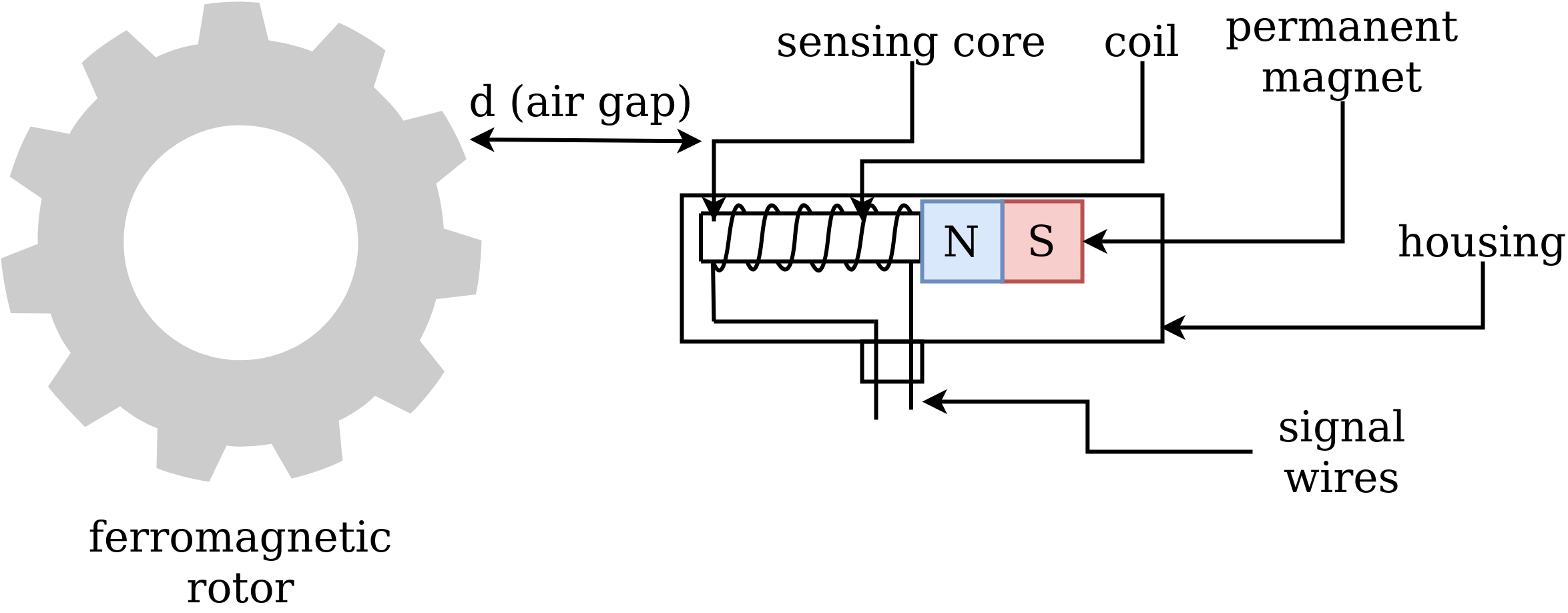
Рис. 6.11. Сенсор измерения скорости по переменному сопротивлению. На валу устанавливается колесо с выступающими зубцами из ферромагнитного материала. Статический датчик представляет собой постоянный магнит с поисковой катушкой (search coil), которая монтируется на фиксированном расстоянии от колеса. Магнитный поток (flux) от постоянного магнита будет изменяться при движении колеса с ферромагнитными зубцами и улавливаться в катушке. При вращении колеса, в катушке будет изменяться наведенное напряжение, которое может быть выражено как:
$$ \phi(t) = \phi_0 + \phi_m sin \omega t $$где
\(\omega\) - угловая скорость колеса.
Тогда индуцируемое напряжение катушки:
$$ e = -N \frac{d \phi}{d t} = -N \omega \phi_m cos \omega t $$где
\(N\) - число оборотов поисковой катушки.
Таким образом и амплитуда, и частота наведенного напряжения будут зависеть от скорости вращения. Далее, напряжение подается на цепь компоратора (comparator circuit), который выдает на выходе квадратную волну с постоянной амплитудой и частотой, пропорциональной скорости.
Для обоих типов рассмотренных сенсоров результатам измерения скорости вращения является квадратная волны. Этот сигнал подается на частотный счетчик (frequency counter), который используется для подсчета количества квадратных импульсов через фиксированные интервалы времени и отображает скорость. Таким образом происходит измерение скорости вращения.
6.4 Заключение
В настоящей главе были рассмотрены некоторые техники измерения смещения и скорости. Выбор той или иной измерительной схемы зависит от технических требований, окружающей среды и доступности места установки. Само же измерение может быть проведено 2 путями:
первый - преобразование перемещения в изменение индуктивности или емкости с последующим использованием подходящей измерительной схемы;
второй - использовать оптический метод, основанный на детектировании отраженного света от движущейся поверхности.
Важным аспектом применением любой из этих схем является возможность определять близость объекта и учет внешних условий измерения.
С другой стороны была рассмотрена возможность определения скорости вращения. Наиболее популярным способом определения такой скорости является электрический генератор (tachogenerator). Он монтируется на вращающийся вал, а далее измеряется генерируемое напряжение (которое будет пропорционально скорости). Однако существуют и безконтактные способы измерить скорость, при которых полученный сигнал преобразуется в частотный с последующим измерением частоты.
Не забывайте, что рассмотренный материал покрывает лишь малую часть возможных способов определения смещения/близости объектов.
6.5 Вопросы для проверки
- Какова функция фазового чувствительного детектора (PSD) в цепи LVDT?
- Опишите конструкцию и принцип работы LVDT.
- Приведите отличия между емкостными детекторами на основе изменения расстояния и площади.
- Какие существуют достоинства и недостатки оптических датчиков перемещения/положения?
- Назовите два способа бесконтактного измерения скорости. Объясните принцип работы любого из них (с использованием схем).
- Оптический датчик измерения скорости имеет диск с 36 прямоугольными отверстиями через равные расстояния по периметру диска. Частота сигнала с фотодетектора составляет 360 Гц. Найдите частоту вращения вала в об/мин (rpm), на котором размещен данный диск.
6.6 Литература
- RDP Group
- Metrolog
- Chen, Gang & Zhang, Bo & Liu, Pinkuan & Ding, Han. (2015). An Adaptive Analog Circuit for LVDT’s Nanometer Measurement Without Losing Sensitivity and Range. IEEE Sensors Journal. 15. 2248-2254. 10.1109/JSEN.2014.2364610.
- Arun T Vemuri; Matthew Sullivan (2016). "Ratiometric measurements in the context of LVDT-sensor signal conditioning" (PDF). Texas Instruments Industrial Analog Applications Journal. Retrieved 27 October 2017.
- LVDT
- J.P. Bentley: Principles of Measurement Systems (3/e), Longman, U.K., 1995.
- L.K.Baxter: Capacitance Sensors Design and Applications, IEEE Press, New Jersey, 1997.
- D. Patranabis: Sensors and Transducers (2/e), PHI, New Delhi, 2003.
7. Измерение потока (Flow Measurement)
7.1 Введение и цели
Точное измерение потока жидкостей и газов является необходимым требованием для поддержания качества многих технологических процессов. Фактически, большинство промышленных контуров управления регулируют именно расход поступающих потоков жидких или газообразных сред.
В зависимости от ситуации могут существовать различные требования к измерению расхода. Это может быть объемный или массовый расход, среда может быть жидкой или газообразной, измерение может быть контактным или бесконтактным и т.д.. В результате существует множество промышленных типов расходомеров, например:
- по давлению (переменного или постоянного перепада давления) (obstruction type: differential pressure or variable area);
- механические счетчики турбинного типа (inferential, turbine type);
- электромагнитные (electromagnetic);
- механические счетчики шестерёнчатого типа (positive displacement, integrating);
- вихревой (fluid dynamic, vortex shedding);
- анемометры (anemometer);
- ультразвуковые (ultrasonic);
- массового расхода на эффекте Кориолиса (mass flowmeter, Coriolis).
После освоения предложенного материала будет хорошо если вы сможете:
- Назвать различные типы расходомеров, используемые в промышленности.
- Различать конструктивные различия между диафрагменными и лопастными расходомерами.
- Понимать основной принцип работы расходомера заградительного типа.
- Объяснить основные принципы работы расходомера турбинного и электромагнитного типа.
- Привести принципиальную блок-схему формирования сигнала для типичных расходомеров.
7.2 Расходомеры по давлению
Одними из самых распространенных приборов измерения расхода являются датчики, основанные на связи скорости потока, его давлении и площади. Как можно догадаться, такие датчики бывают 2 типов.
- Переменного давления. Такие, как орифиметр (Orifice meter, расходомер с сужающим диафрагменным устройством, которые являются грубой формой расходомера Вентури), расходомер Вентури (расходомер с сужающим устройством, Venturimeter), трубка Пито (Pitot tube).
- Переменной площади (постоянный перепад давления) - ротаметры (rotameter)..
При этом в обоих случаях на пути потока создается заграждение, а перепад давления потока до и после этой преграды будет связан с расходом.
7.2.1 Основные принципы
Согласно показаниям числа рейнольдса \(R_D\), поток может быть двух типов: ламинарный (можно представить его как "вязкий", \(R_D \le \sim 2000\)) и турбулентный (\(R_D > \sim 2000\)).
В настоящем пособии будем считать, что поток турбулентный (обычно так и бывает на практике) и рассмотрим поток жидкости по замкнутой трубе переменного сечения (рис. 7.1).
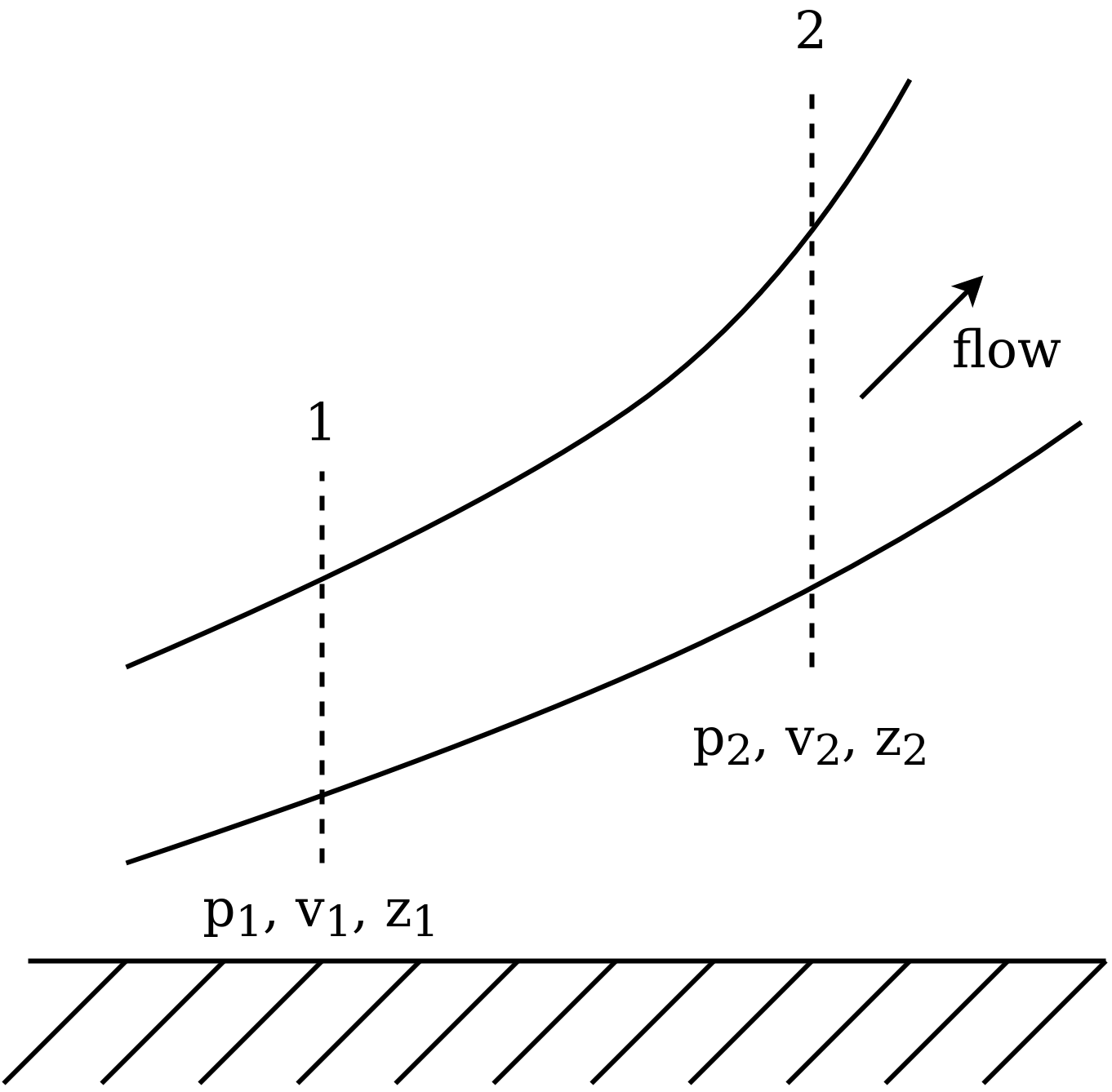
Рис. 7.1. Поток через трубу переменного сечения (varying cross-section). Пусть давление [Па], скорость [\(м/c\)], площадь поперечного сечения [\(м^2\)] и высота над базовой точкой [м] будут выражены как: \(p_1\), \(\nu_1\), \(A_1\) и \(z_1\) для сечения 1 и \(p_2\), \(\nu_2\), \(A_2\) и \(z_2\) для сечения 2 соответственно. Дополнительно предположим, что поток не сжимаемый. Тогда
$$ \begin{equation}\begin{aligned} \frac{p_1}{\gamma} + \frac{\nu^2}{2g} + z_1 = \frac{p_2}{\gamma} + \frac{\nu_2^2}{2g} + z_2 \end{aligned}\end{equation} \tag{7.1}\label{eq7.1} $$где
\(\gamma = \rho g\) - это удельный вес жидкости (specific weight of the fluid, \(кг/(м \cdot с)^2\))
\(\rho\) - плотность [\(кг/м^3\)]
\(g\) - ускорение свободного падения [\(9.81\ м/с^2\)]
Если \(z_1 = z_2\), тогда:
$$ \frac{p_1}{\gamma} + \frac{\nu_1^2}{2g} = \frac{p_2}{\gamma} + \frac{\nu_2^2}{2g} $$При это, если жидкости не сжимаемые, то \(nu_1 A_1 = nu_2 A_2\).
Таким образом,
$$ \nu_2^2 - \nu_1^2 = \frac{2g}{\gamma} (p_1 - p_2) $$или
$$ \nu_2^2 (1-\frac{A_2^2}{A_1^2}) = \frac{2g}{\gamma} (p_1 - p_2) $$В результате получаем
$$ \nu_2 = \frac{1}{\sqrt{(1-\frac{A_2^2}{A_1^2})}} \sqrt{\frac{2g}{\gamma} (p_1 - p_2)} = \frac{1}{\sqrt{1-\beta^4}} \sqrt{\frac{2g}{\gamma} (p_1 - p_2)} $$Учитывая круглое сечение, определим \(\beta\) как соотношение двух диаметров, т.е. \(\beta = \frac{d_2}{d_1}\) и \(\frac{A_2}{A_1} = \beta^2\)
Тогда объемный поток через трубу, может быть выражен как:
$$ \begin{equation}\begin{aligned} Q = \nu_2 A_2 = \frac{A_2}{\sqrt{1-\beta^4}} \sqrt{\frac{2g}{\gamma} (p_1 - p_2)} = \frac{A_2}{\sqrt{1-(\frac{d_2}{d_1})^4}} \sqrt{\frac{2}{\rho} (p_1 - p_2)} \end{aligned}\end{equation} \tag{7.2}\label{eq7.2} $$Примечание. Проверим все наши вычисления по размерности:
$$ Q = \nu_2 A_2 = \frac{м}{с} \cdot м^2 = \frac{м^3}{с} $$С другой стороны:
$$Q = \frac{A_2}{\sqrt{1-(\frac{d_2}{d_1})^4}} \sqrt{\frac{2}{\rho} (p_1 - p_2)} = \\ = м^2 \cdot \sqrt{\frac{1}{\frac{кг}{м^3}} \cdot Па} = м^2 \cdot \sqrt{\frac{м^3}{кг} \cdot \frac{кг}{м \cdot с^2}} = м^2 \cdot \frac{м}{с} = \frac{м^3}{с}$$Все сходится, ЧТД.
Для массы потока \(Q_m = \rho Q\ [\frac{кг}{с}]\)
Из приведенного выше выражения можно сделать вывод, что при наличии препятствия на пути движения потока, которое изменяет площадь поперечного сечения, будет наблюдаться разность статических давлений до и после препятствия. Измеряя разность этих давлений можно получить скорость потока с помощью уравнения \(\eqref{eq7.2}\). Однако, данная формула справедлива только для несжимаемых потоков (т.е. жидкостей, не газов) и при этом зависимость между объемным расходом и отношением давлений является не линейной. Для получения линейной зависимости, необходимо использовать специальный контур обработки сигнала (контур с квадратным корнем, square rooting circuit). Но об этом мы поговорим далее.
Таким образом, в зависимости от типа препятствия, мы можем получить разные типы измерителей расхода.
7.2.2 Орифиметр (Orifice meter, расходомер с сужающим диафрагменным устройством)
Этот тип датчиков представляет собой грубую форму измерителя Вентури, где в трубе установлена диафрагменная пластина (orifice plate), как показано на рис. 7.2.
Примечание. Измеритель Вентури является "точкой отсчета" и основным измерителем данного класса датчиков. Его мы разберем немного позже.
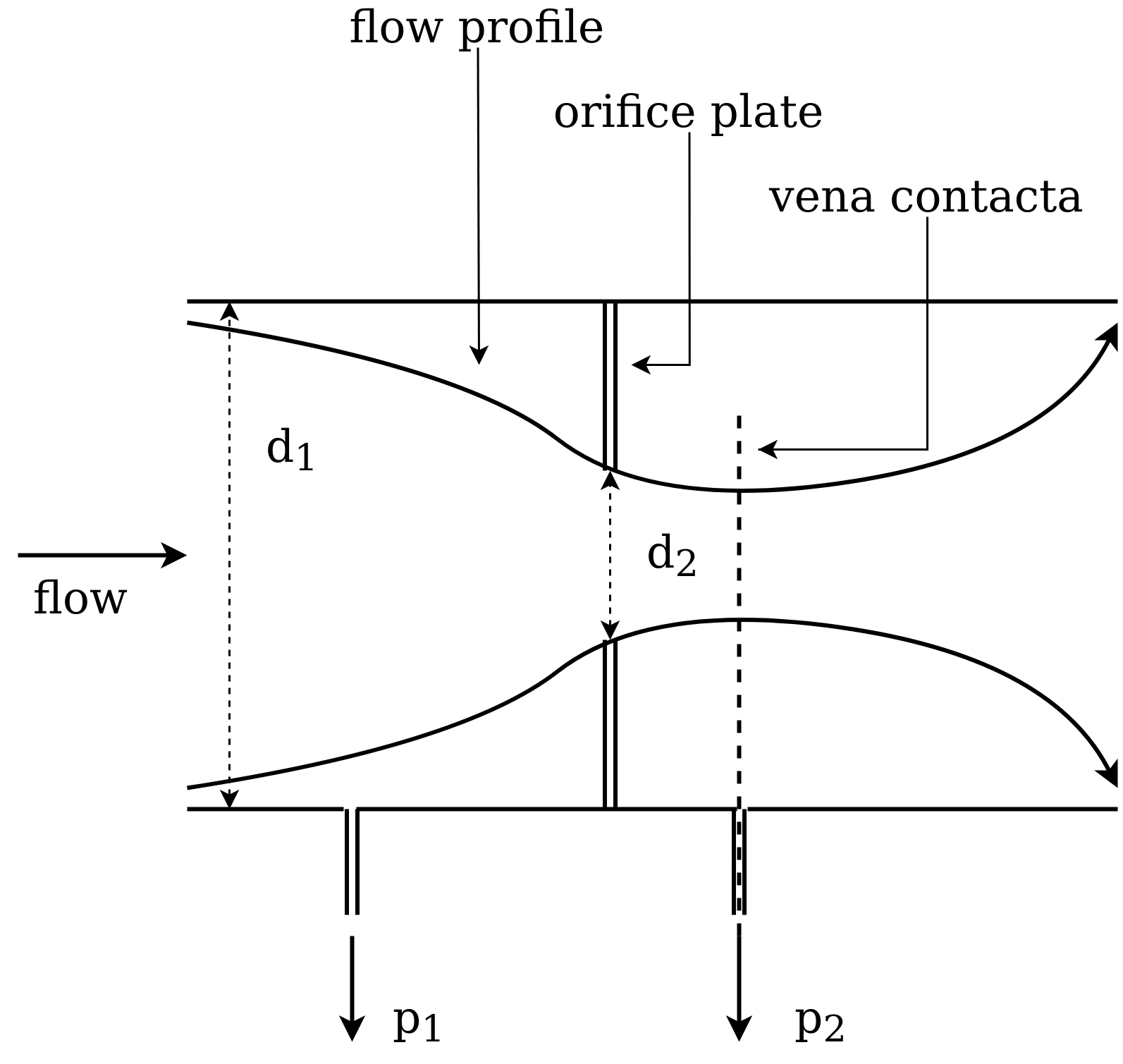
Рис. 7.2. Орифиметр. Если \(d_1\) и \(d_2\) диаметр трубы и отверстия в диафрагме (это упругая часть, сужающая диаметр исходной трубы) соответственно, то скорость потока может быть получена согласно уравнению \(\eqref{eq7.2}\) при измерении разницы давлений \((p_1 - p_2)\).
Задача 7.1 Рассчитайте массовую скорость потока, если диаметр трубы 0.5 м, диаметр сужения 30 см, а разница давлений составляет 20 Па. Плотность жидкости равна 1 кг/м3.$
7.2.3. Поправки для расчета потока
Рассмотренное ранее выражение для потока \(\eqref{eq7.2}\) хоть и связывает интересующие нас величины, но не является достаточно точным для реального применения (подумайте, почему). Для более точных расчетов необходимо использовать поправку в виде коэффициента расхода (discharge coefficient) (\(C_d\)):
$$ \begin{equation}\begin{aligned} Q = \nu_2 A_2 = \frac{C_d A_2}{\sqrt{1-\beta^4}} \sqrt{\frac{2}{\rho} (p_1 - p_2)} \end{aligned}\end{equation} \tag{7.3}\label{eq7.3} $$Коэффициент \(C_d\) определяется как отношение фактического потока к идеальному и всегда меньше 1. По факту существует 2 основных причины, по которым реальная скорость потока всегда меньше идеальной (которая получена по уравнению \(\eqref{eq7.2}\)).
- Первая - предположение об отсутствия трения для потока не всегда верно. Сумма трений зависит от числа Рейнольдса (\(R_D\)).
- Вторая (более важная) - это то, что реальная минимальная площадь "сжатого" потока не ограничивается отверстием \(А_2\), а немного меньше и достигается на некотором расстоянии от диафрагмы (контакт Вена, Vena Contracta). Именно в этой точке необходимо брать давление для расчета, чтобы получить максимальную (и правильную) разность.
Таким образом, нам необходимо использовать поправочный коэффициент \(C_d < 1\) для уточнения реальных расчетов.
На самом деле, \(C_d\) зависит от \(\beta\), также как и от \(R_D\). Но было установлено, что для \(R_D > 10^4\) поток является полностью турбулентным и зависимостью \(C_d\) от \(R_D\) можно пренебречь. В таком случае значение \(C_d\) обычно варьируется между 0.6 и 0.7.
7.2.4. Падение давления, измеритель Вентури и форсунка в потоке (Venturimeter and Flow nozzle)
Установка рассмотренной ранее сужающей диафрагмы является наиболее распространенным случаем измерения скорости потока. Основным ее достоинством является то, что это дешевое устройство, простое в конструкции и легко устанавливаемое в трубу (рис. 7.3).
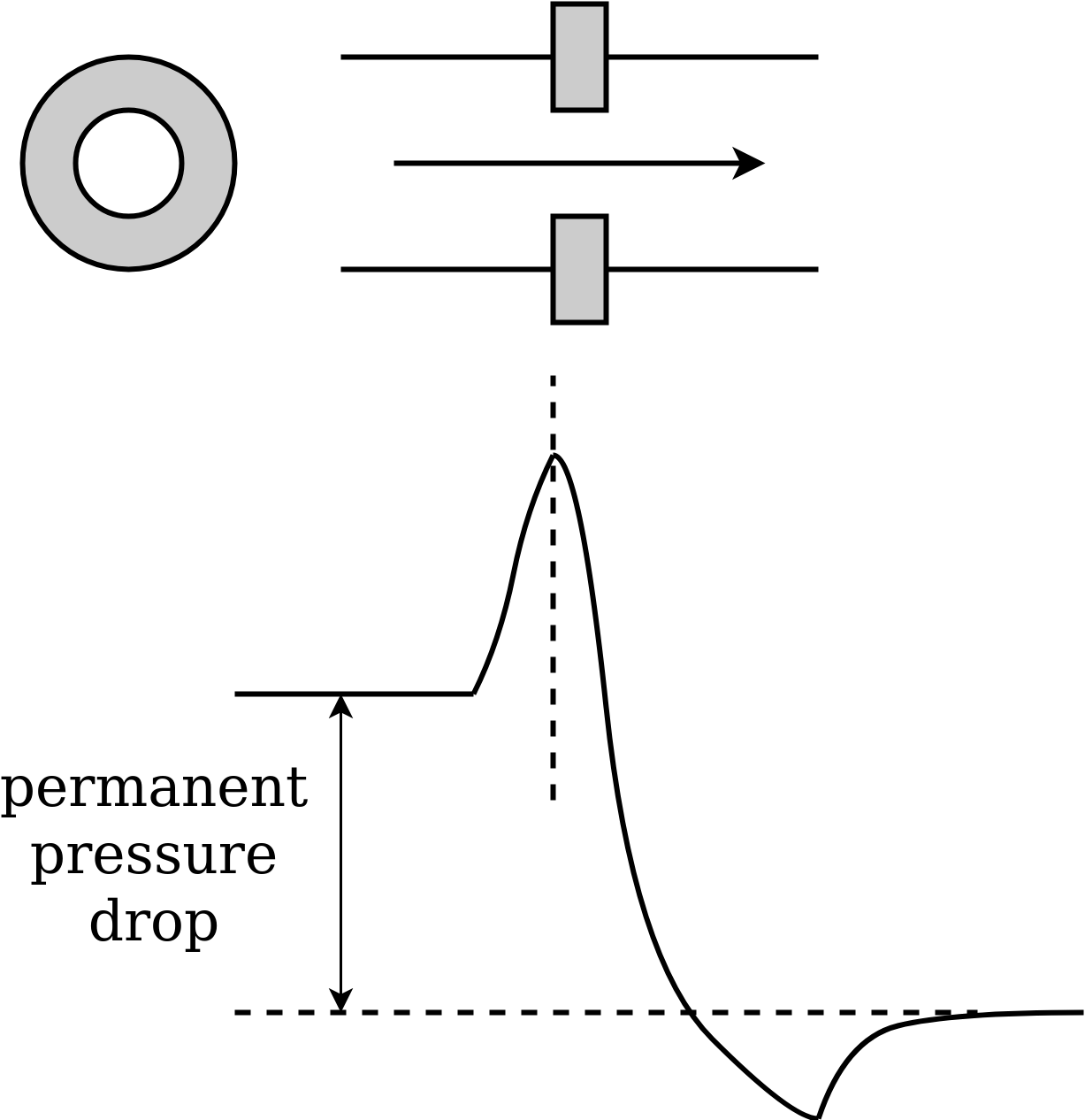
Рис. 7.3. Сужающая диафрагма и падение давления. Обычно, такие диафрагмы - это круглые пластины с отверстием по центру. Врезки для измерения давления обычно делаются на расстоянии \(D\) и \(0.5 \cdot D\) выше и ниже по потоку от точки замера (\(D\) - внутренний диаметр трубы).
Однако основным недостатком использования диафрагменной пластины является понижение давления в трубе (относительно штатного давления среды, рис. 7.3). После установленной диафрагмы давление потока значимо падает и может быть восстановлено лишь частично. Величина снижения давления достигает 40 %. При этом во многих промышленных системах это недопустимо и приводит к большим энергопотерям. Но описанная проблема решается использованием более совершенных конструкций: измерителем Вентури (рис. 7.4) или форсункой в потоке.
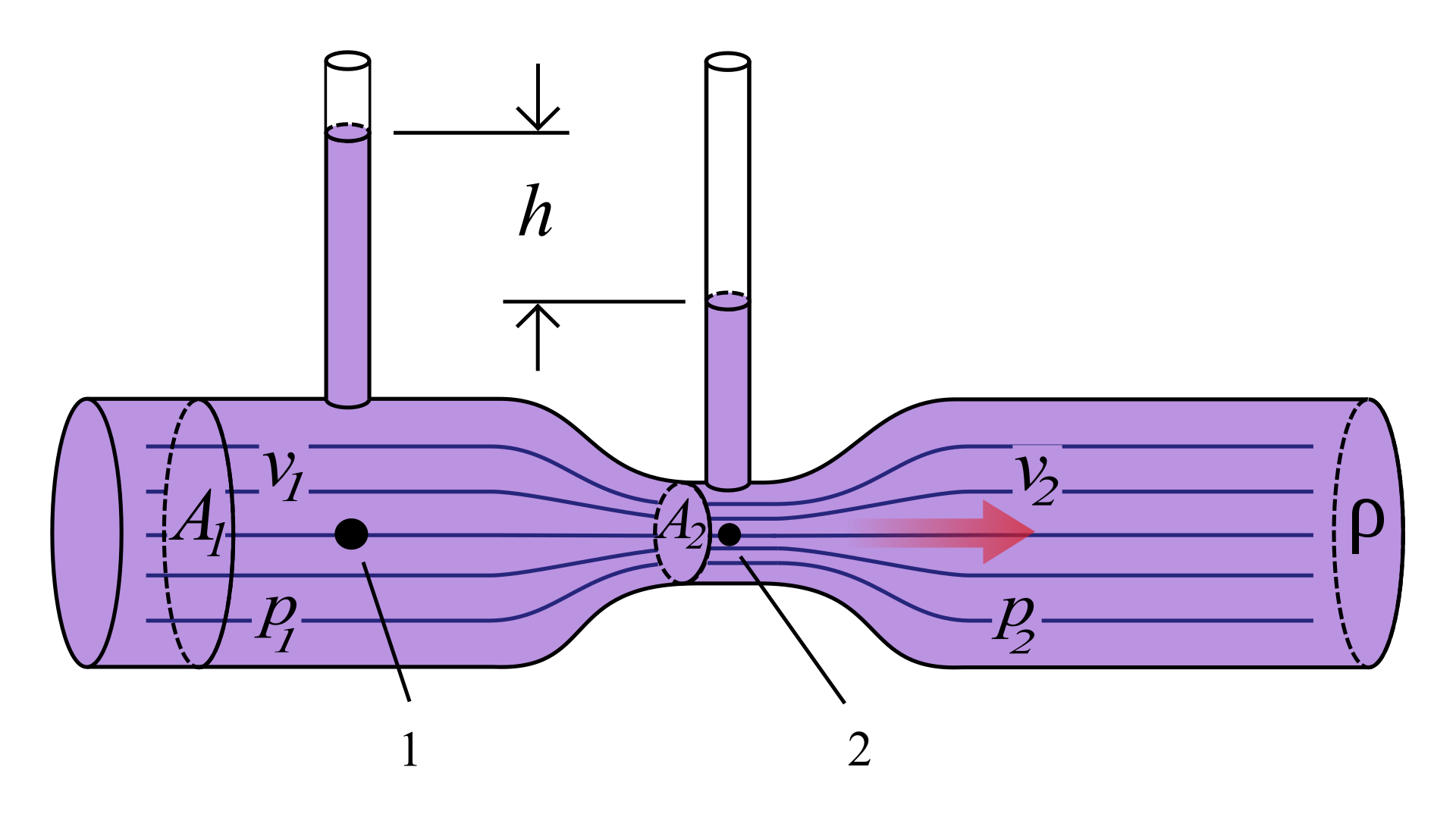
Рис. 7.4. Измеритель Вентури (https://en.wikipedia.org/wiki/Venturi_effect). Конструкция Вентури обеспечивает постепенное изменение давления с последующим его восстановлением. В результате не наблюдается постоянного уменьшения давления в потоке, а коэффициент расхода \(C_d\) варьируется между 0.95 и 0.98. Такая конструкция также обеспечивает высокую механическую прочность измерителя. Однако основным недостатком является высокая стоимость устройства.
Компромиссом между диафрагмой и измерителем Вентури является установка форсунки внутри потока (рис. 7.5).
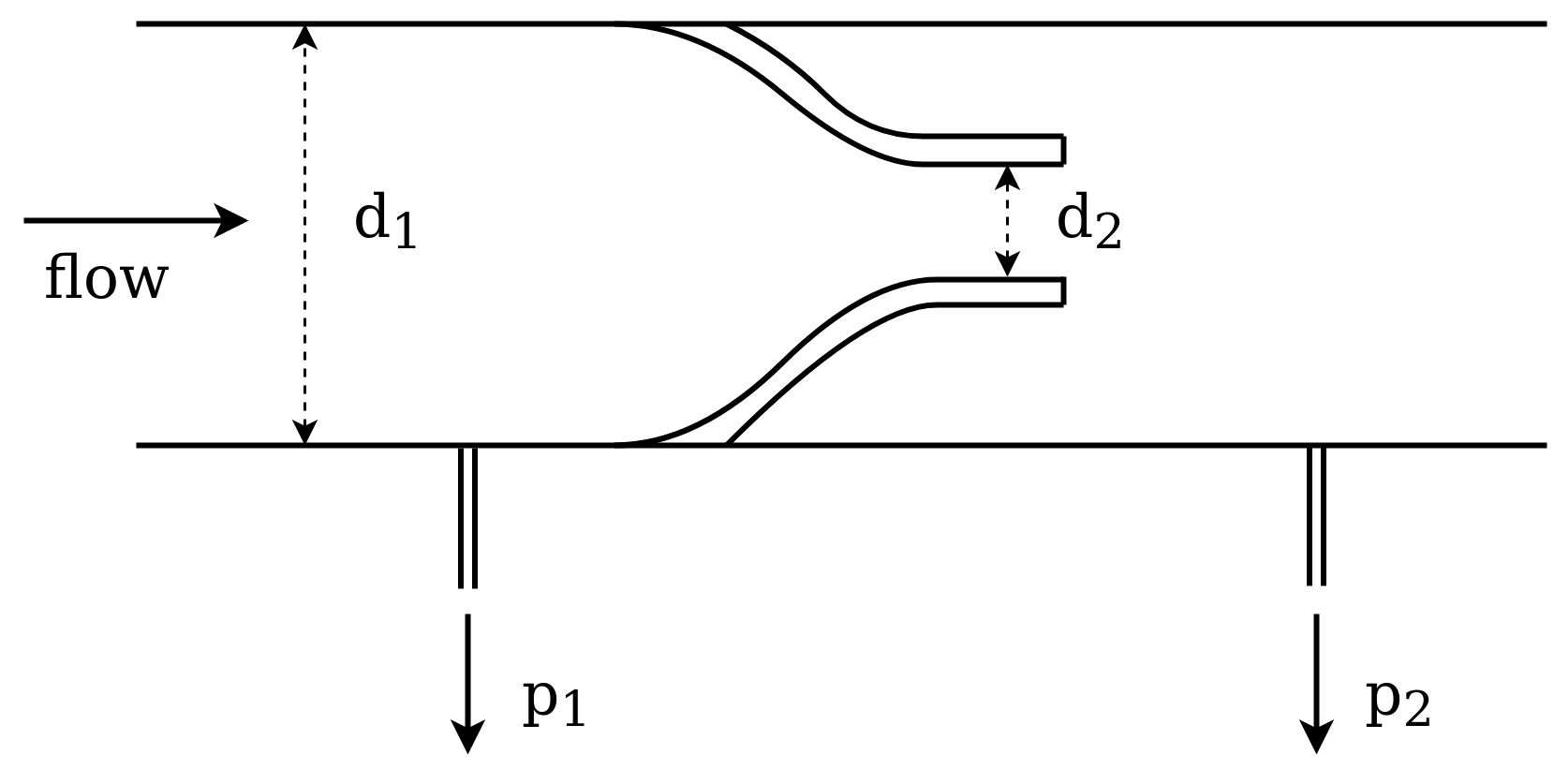
Рис. 7.5. Форсунка в потоке. В заключении стоит отметить, что при установке любых расходомеров заградительного типа (obstruction type flowmeters) существует несколько специфичных рекомендаций (внимательно читайте инструкцию к каждому конкретному датчику!) и наиболее важной из них является то, что рядом с расходомером не должно быть других препятствий или изгибов трубы. Несмотря на то, что данный тип расходомеров наиболее популярен в промышленности, их точность не велика при низких скоростях/расходах потока (для таких потоков они не рекомендуются).
7.2.5 Измерение расхода сжимаемого потока (газ)
До сих пор мы обсуждали измерения несжимаемых потоков (жидкости). В свою очередь для сжимаемых потоков (газы), скорость обычно измеряется в массовом расходе. Для газов, как и для жидкостей, также могут использоваться расходомеры заградительного типа, но тогда необходимо использование дополнительного корректирующего фактора для учета сжимаемости потока.
Массовый расход газа может быть выражен как:
$$ W = Y [\frac{C_d A_2}{\sqrt{1-\beta^4}} \sqrt{\frac{2g (p_1-p_2)}{\nu_1}}] $$где,
\(\nu = \frac{yRT}{p}\) - удельный объем газа (specific volume) [ \(\frac{m^3}{kgf}\)],
\(y\) - фактор сжатия (compressibility factor),
\(R\) - газовая постоянная (gas constant) [\(\frac{J}{K \cdot mol}\)],
\(Y = \frac{Compressible\ flow\ rate\ (mass)}{Incomressible\ flow\ rate\ (mass)} = 1-(0.41+0.35 \beta^4) \frac{p_1-p_2}{p_1} \frac{1}{K}\) - приближенное эмпирическое выражение фактора расширения (используется для диапазона \(0.8 \le \frac{p_2}{p_1} \ge 1.0\)).
\(K = \frac{C_p}{C_v}\) - соотношение удельных теплот (specific heat ration): для постоянного объема (\(C_v\)) и для постоянного давления (\(C_P\)). K = 1.66 для идеального одноатомного газа и K = 1.4 для воздуха (приблизительно двухатомный газ).
Все остальные обозначения приведены выше.
7.2.6 Трубка Пито (Pitot Tube)
Трубки Пито широко используются для измерения скорости в самолетах. Ее основной принцип работы и типичная конструкция приведены на рис. 7.6.
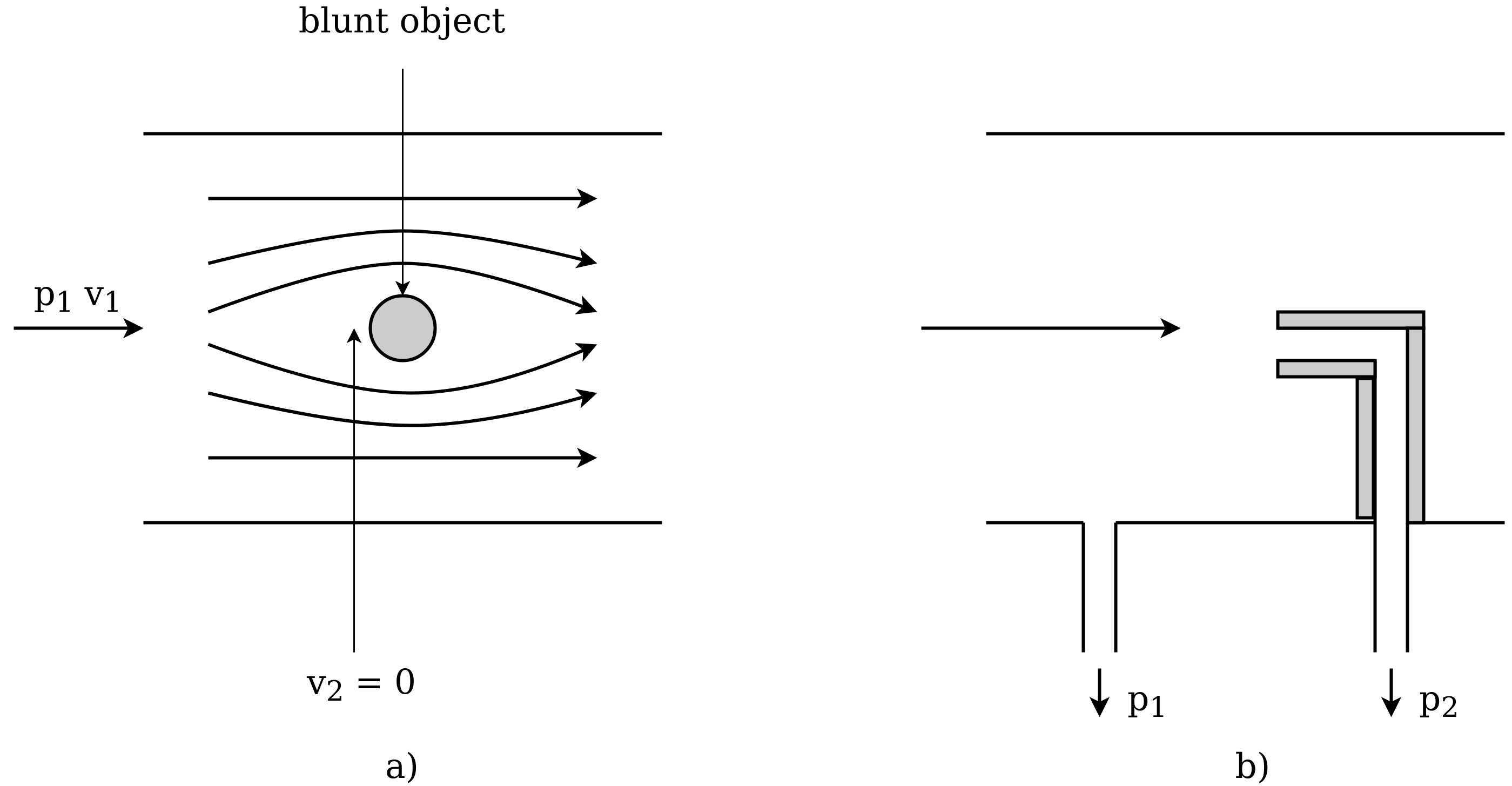
Рис. 7.6. Трубка Пито: a) основной принцип действия и b) конструкция. Если в канал потока поместить твердый объект (blunt object), то скорость потока в точке, расположенной непосредственно перед ним, будет равна 0 (т.е. поток "останавливается" этим объектом). Предположив, что поток несжимаем. Тогда из \(\eqref{eq7.1}\) получим:
$$ \frac{p_1}{\gamma} + \frac{\nu_1^2}{2g} = \frac{p_2}{\gamma} + \frac{\nu_2^2}{2g} $$при \(\nu_2 = 0\):
$$ \frac{\nu_1^2}{2g} = \frac{p_2 - p_1}{\gamma} $$или
$$ \nu_1 = \sqrt{\frac{2g}{\gamma} (p_2 - p_1)} $$Однако для сжимаемых потоков нужно вносить поправки.
7.2.7 Ротаметр (расходомер с переменной площадью, расходомер постоянного перепада давления)
Диафрагменные измерители, измерители Вентури и сопла (форсунки) работают по принципу переменного давления: площадь препятствия постоянна, а разница давлений меняется при изменении скорости потока. С другой стороны, ротаметр работает при постоянной разнице давлений, но за счет изменяющейся площади.
Такой тип приборов может быть использован только в вертикальной трубе. Его точность меньше по сравнению с другими типами расходомеров (примерно на 2%), но основным его достоинством является простота конструкции и установки. Дополнительно, расход может быть непосредственно виден на калибровочной шкале без помощи какого-либо дополнительного оборудования, а само устройство работает в широком диапазоне изменений расхода (примерно 10:1).
Основная конструкция приведена на рис. 7.7.
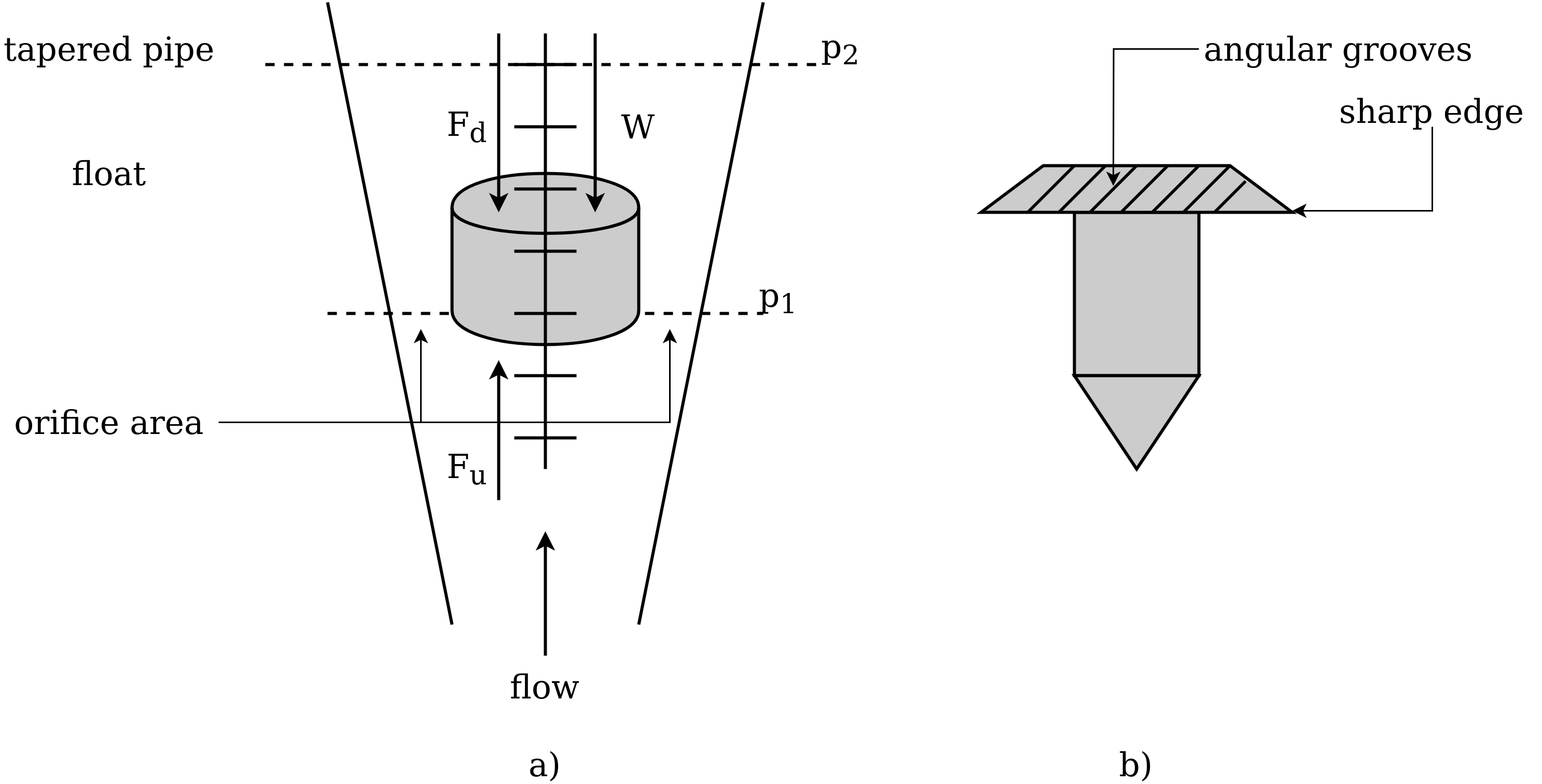

c)Рис. 7.7. Конструкция ротаметра (a, b) и пример его использования (c). Само устройство состоит из вертикальной трубы, суженой в нижней части. Внутри трубы находиться металлический поплавок цилиндрического типа. Поток течет вверх через зазор между трубой и поплавком. При движении поплавка вниз или вверх происходит изменение зазора, в результате чего изменяется площадь пропускного отверстия. Поплавок остановиться в том случае, когда тяга от падения давления через зазор труба-поплавок (направленная вверх) уравновеситься силой тяжести самого поплавка (направлена вниз). Положение поплавка предварительно калибруется по расходу потока.
Предположим, что:
\(\gamma_1\) - удельный вес потока до поплавка (т.е. нормированный на объем или площадь)
\(\gamma_2\) - удельный вес потока после поплавка
\(\nu_f\) - объем потока
\(A_f\) - площадь потока
\(A_t\) - площадь сечения трубы при равновесии (в соответствии с калибровочной шкалой)
Тогда из уравнения \(eqref{eq7.3}\) для сечения и с учетом несжимаемости жидкости мы имеем:
$$ \begin{equation}\begin{aligned} Q = \frac{C_d A_2}{\sqrt{1-(\frac{A_2}{A_1})^2}} \sqrt{\frac{2g}{\gamma_2} (p_1-p_2)} \end{aligned}\end{equation} \tag{7.4}\label{eq7.4} $$Положим, \(F_d\) - сила, действующая вниз на поплавок, \(F_u\) - сила, действующая вверх на поплавок, \(W\) - собственный вес поплавка (рис. 7.7).
Тогда при равновесии \(W = F_u - F_d\) или
$$ V_f (\gamma_1 - \gamma_2) = p_1 A_f - p_2 A_f $$и
$$ p_1 - p_2 = \frac{\nu_f}{A_f} (\gamma_1 - \gamma_2) $$Подставляя полученное выражение в \(\eqref{eq7.4}\) получим:
$$ \begin{equation}\begin{aligned} Q = \frac{C_d (A_t - A_f)}{\sqrt{1-(\frac{A_t - A_f}{A_f})}} [\sqrt{\frac{2g}{\gamma_2} \frac{\nu_f}{A_f} (\gamma_1 - \gamma_2)}] \end{aligned}\end{equation} \tag{7.5}\label{eq7.5} $$Условие в третьей скобке в приведенном выше выражении - константа. Тогда при \((\frac{A_t-A_f}{A_t})^2 \lt \lt 1\) получим:
$$ Q = K (A_t - A_f) $$Если труба сделана таким образом, что \(A_t\) изменяется линейно со смещением, то у нее есть линейное соотношение в форме,
$$ Q = K_1 + K_2 x $$То есть, шкала трубки может быть градуированной линейно по скорости потока. В противном случае смещение поплавка может быть преобразовано в электрический сигнал с помощью LVDT или аналогичного типа датчика перемещения. Для измерения больших расходов ротаметр обычно располагается в обходной (bypass) линии.
Основной источник погрешности ротаметра связан с изменением плотности измеряемой среды. Кроме того, наличие вязкости может оказывать дополнительное воздействие на поплавок (вязкость как дополнительная сила воздействия). Для минимизации подобных погрешностей используется особая конструкция поплавка (рис. 7.7)
Стоит учитывать, что устройство поплавка в значительной степени определяется производительностью ротаметра. В общем случае поплавок должен:
- быть расположен вертикально;
- создавать равномерную турбулентность, чтобы быть нечувствительным к вязкости;
- уменьшить чувствительность ротаметра к изменению плотности потока.
В общем случае верхняя часть поплавка имеет острый край и несколько угловых канавок. Жидкость, проходящая через эти канавки, вызывает вращение поплавка и возникающая при этом турбулентность значительно снижает влияние вязкости.
Согласно \(\eqref{eq7.5}\) объемный расход среды может быть записан как:
$$ Q = K \sqrt{\frac{2g}{\gamma_2} \frac{\nu_f}{A_f} (\gamma_1 - \gamma_2)} $$Значения расходомера можно сделать практически независимыми от плотности потока, если правильно выбрать материал поплавка, например такой, что \(\gamma_1 >> \gamma_2\). Тогда для измерения массового потока (W), мы можем использовать:
$$ W = \gamma_2 Q = K \sqrt{K_1 (\gamma_1 - \gamma_2) \gamma_2} $$И условие \(\frac{dW}{d \gamma_2} = 0\), выполняется, если \(\gamma_1 = \gamma_2\). Этого можно добиться при использовании полого или пластикового поплавка.
7.2.8 Электромагнитные измерители потока (Electromagnetic Flowmeter)
Данный тип расходомеров отличается от остальных сразу по нескольким показателям.
- Не создает препятствий для потока.
- Выдает линейный выход в виде напряжения.
- На выход не влияет давление, температура и вязкость потока.
- Может быть измерен обратный поток.
- Могут быть измерены малые скорости потока (до \(10^{-6}\) m/sec).
Электромагнитные измерители потока подходят для измерения скорости только проводящих (например, ртуть) и слабо проводящих (например, вода) потоков. Основной принцип работы приведен на рис. 7.8.
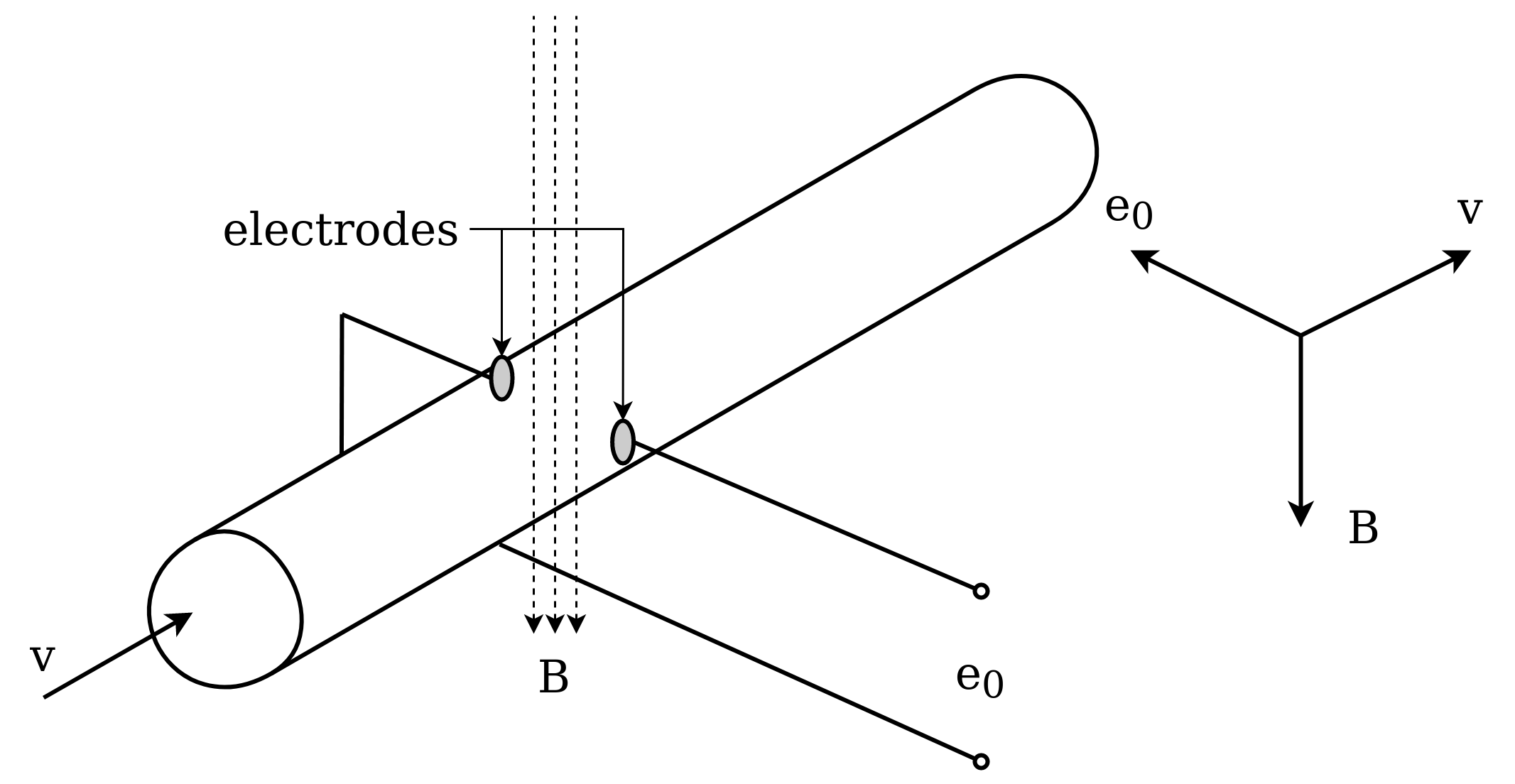
a)

b)Рис. 7.8. Электромагнитный измеритель потока: схема (a) и внешний вид (b) (https://en.wikipedia.org/wiki/Magnetic_flow_meter). Устройство работает по принципу, основанному на электромагнитной индукции. Когда проводник движется в магнитном поле перпендикулярно направлению потока, напряжение будет наведено перпендикулярно направлению движения и перпендикулярно магнитному полю. При этом протекающая жидкость должна действовать как проводник. Внешнее магнитное поле прикладывается перпендикулярно направлению потока, и два электрода крепятся к стенке трубопровода, как показано на рисунке. Тогда наведенное напряжение составит:
$$ e_0 = \frac{B}{\nu} $$где \(l\) - длина проводника (в данном случае диаметр трубы \(d\)), а \(v\) - скорость потока. Вышеприведенное выражение показывает обратную зависимость между наведенным напряжением и скоростью. Однако, применяемое магнитное поле не будет постоянным (DС), если жидкая среда является водой или любой другой поляризуемой жидкостью. Это связано с тем, что если магнитное поле является DC, то наведенное напряжение будет также DC и небольшое количество постоянного тока будет протекать при подключении измерительной цепи к клеммам. Этот небольшой ток вызовет электролиз и образуются пузырьки кислорода и водорода, которые будут прилипать к поверхностям электродов в течение некоторого времени. Это обеспечит изоляционный слой на поверхностях электродов, который нарушит процесс генерирования напряжения. В результате магнитное поле, применяемое для поляризуемых жидкостей должно быть переменным (возбужденное переменным током AC или импульсами постоянного тока).
Сам измеритель может использоваться только для жидкостей с умеренной проводимостью (более 10 мкм/см). В результате он не подходит для газов или жидких углеводородов, а примерная погрешность измерения скорости потока составляет около \(\pm 1%\).
7.2.9. Механические счетчики турбинного типа (Turbine type Flowmeter)
Турбинный тип расходомеров - это простой способ измерить скорость потока. Вращающийся вал с угловыми лопастями турбинного типа помещается внутрь трубы. Протекающий поток вызывает вращение турбины и ее скорость вращения пропорциональна скорости потока (рис. 7.9).
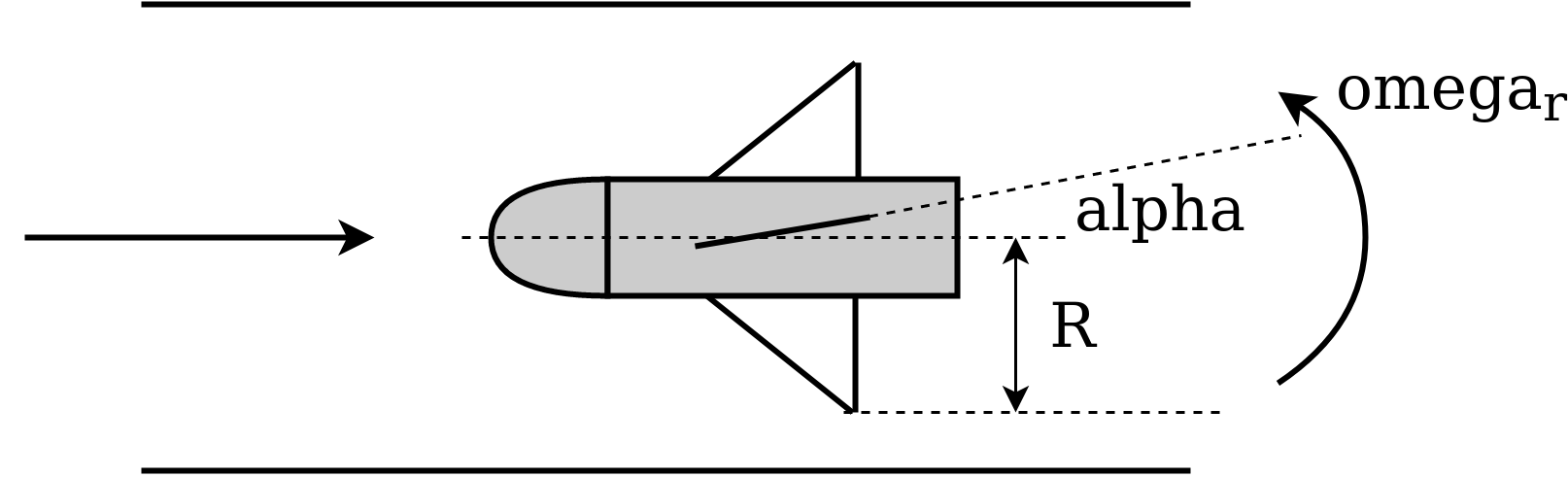
Рис. 7.9. Турбинный расходомер. Пусть лопасти наклонены на угол \(\alpha\) к корпусу, то
$$ \frac{\omega_r R}{\overline{vi}} = tan \alpha $$где,
\(\overline{vi}\) - средняя скорость потока (\(=\frac{Q}{A}\))
\(Q\) - объемный расход
\(A\) - эффективное сечение потока в трубе
\(R\) - радиус лопастей
\(\omega_r\) - угловая скорость лопастей.
Исходя из приведенного уравнения, объемный расход будет связан с угловой скоростью как \(\omega_r = k Q\) где \(k = \frac{tan \alpha}{RA}\).
При этом скорость вращения турбины может быть измерения разными путями (например, оптическим способом или по вырабатываемому напряжению (inductive pick up) и т.д.). Если на выходе получается частотный сигнал, то количество импульсов будет равно:
$$ n_p = \frac{T_p f}{Q} $$где,
\(n_p\) - количество импульсов на единицу объема;
\(T_p\) - временная константа [мин];
\(Q\) - объемный расход;
\(f\) - частота [Гц].
Задача. Подумайте, в каких случаях может получаться частотный сигнал. Какую можно предложить схему для получения сигнала, связанного со скоростью потока с использованием турбины?
7.2.10 Вихревой расходомер (Vortex type flowmeter)
Образование завихрений в потоке, протекающем через препятствие является обычным явлением (например, обратите внимание на ветку или камень в реке). Однако не всем известно, что частота образования завихрений пропорциональна скорости потока. На рис. 7.10 показано устройство вихревого расходомера.
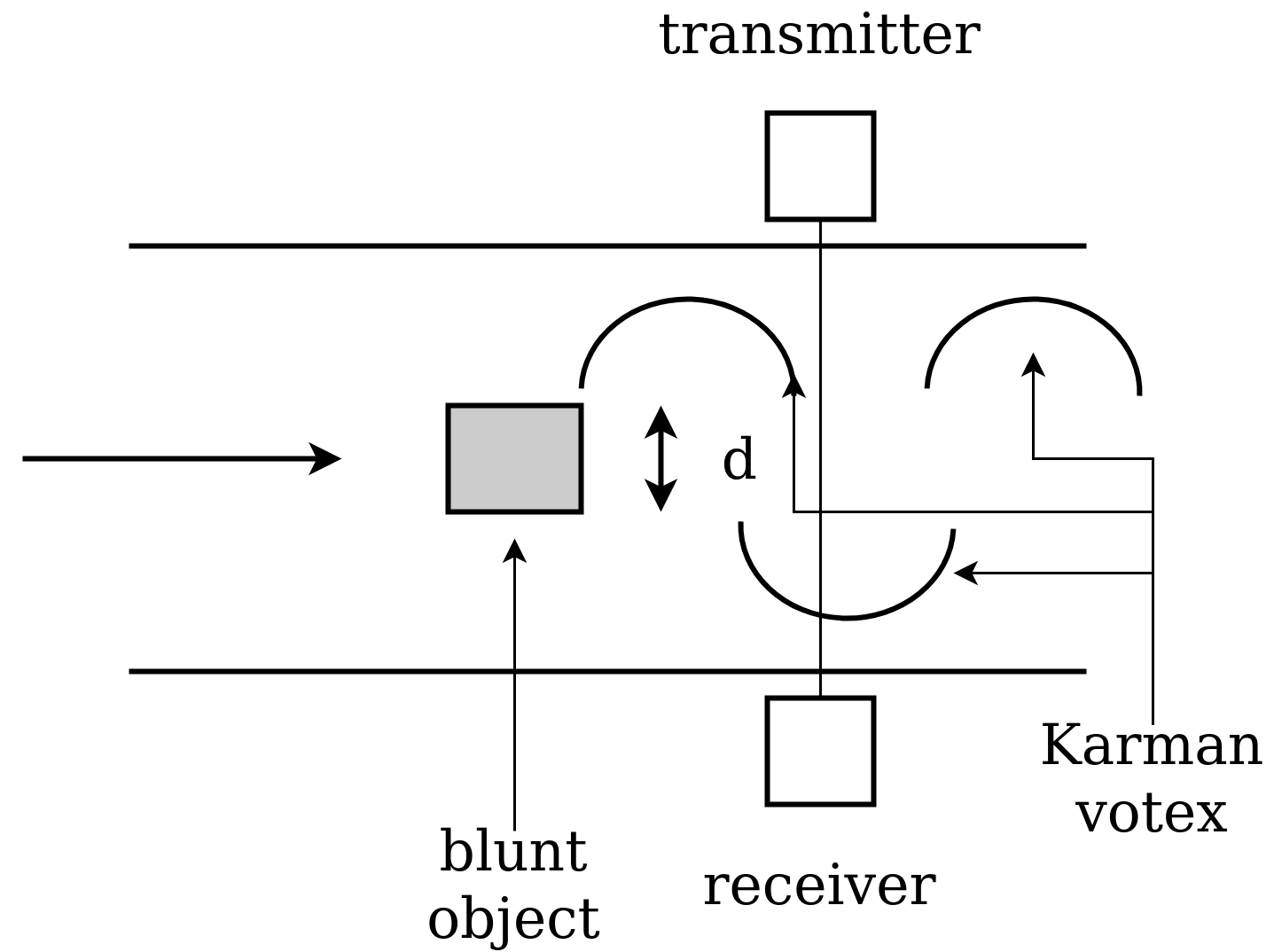
Рис. 7.10. Вихревой расходомер. Принцип его работы основан на принципе затенения центра завихрения (principle of vertex shading). При размещении плотного предмета на пути потока образуются вихри. При этом вихри такого рода называются "Вихрь Кармана" (Karman Vortex). Если поток турбулентный и число Рейнольда большое (\(R_D > 10^4\)), то частота формирования вихрей задается как:
$$ f = \frac{N_{st}}{d} \nu $$где,
\(d\) - ширина плотного объекта [м];
\(\nu\) - скорость потока [м/с];
\(N_{st}\) - постоянна, называемая числом Струхаля (Strouhal Number.
На рис. 7.10 показана типичная схема измерения частоты образования завихрений ультразвуковым способом. Завихрение будет модулировать интенсивность ультразвука, получаемого приемником. При этом частота модуляции может быть легко измерена и использована для расчета скорости потока.
7.2.11 Заключение
В данной главе мы изучили различные способы измерения потоков в производственных условиях. Вы могли заметить, что большинство техник основаны на заграждающем типе расходомеров. При этом наиболее популярными являются мембранные расходомеры и расходомеры Вентури. Однако им требуются дополнительные преобразователи разницы давлений в соответствующий электрический сигнал, а так же устройства квадратичного преобразования для линеаризации выходящего сигнала (пропорционального расходу жидкости).
С другой стороны существует электромагнитный расходомер, который обеспечивает прямой метод измерения расхода и сам выдает линейный сигнал, пропорциональный расходу напряжение. Дополнительно, он не создает никаких препятствий потоку (а значит и не создает разницы давлений). Но данный метод измерения подходит только для проводящих жидкостей и не может использоваться для газов. Более того, поляризационные жидкости (например, вода) требуют отдельного контура возбуждения и обработки сигнала.
Помимо рассмотренных в настоящей главе существуют и другие типы расходомеров (например, достаточно дорогой, но не инвазивный ультразвуковой расходомер, рис. 7.11). Другим не рассмотренным типом датчиков является расходомер положительного вытеснения (Positive displacement flowmeter) - это интегральный тип расходомера который измеряет суммарный расход потока за заданное время (находит широкое применение в счетчиках воды, бензиновых насосах и т.п.).

Рис. 7.11. Пример ультразвукового расходомера на производстве фосфорной кислоты. Упражнения
- Что имеется в виду под коэффициентом расхода в расходомерах по давлению?
- Сравнить преимущества и недостатки диафрагменного расходомера и вентуриметра.
- Можно ли использовать ротаметр в горизонтальном трубопроводе? Если нет, то объясните почему.
- Магнитное поле, действующее на электромагнитный расходомер, изменяется во времени и не является постоянным. Почему?
- У какого типа расходомеров частота измерений изменяется со скоростью потока?
- В чем разница между расходомерами с переменным и с постоянным перепадом давления?
- Падение давления через отверстие расходомера по давлению измеряется для определенного расхода. Если удвоить расход, сохранив все остальные параметры постоянными, что произойдет с перепадом давления?
- Оно останется неизменным.
- Оно также удвоится.
- Оно уменьшиться вдвое.
- Оно увеличится в четыре раза.
- Что будет с показаниями ротаметра, который предназначен для измерения расхода воды, но используется для измерения расхода рассола (удельный вес 1,15) без перекалибровки и изменения шкалы? Уменьшатся или увеличатся его показания? Ответ обоснуйте.
Список литературы
- Efunda. Engineeric fundamentals
- IDC Technologies
- Industrial Flow Measurments
- Specific heats of gases
- The process piping
8. Измерение уровня, влажности и рН (Measurement of Level, Humidity and pH)
8.1 Введение и цели
Теперь мы переходим к более сложным параметрам для измерений: уровень жидкости, влажность (влагосодержание) и рН. Эти величины весьма важны для промышленного производства (в особенности - химического). В этой главе мы кратко рассмотрим различные техники, применимые в промышленности, а так же принципы измерения и конструктивные особенности.
По окончанию главы проверьте себя, что вы можете:
- Привести различные методы измерения уровня и влагосодержания (moisture).
- Объяснить основные техники измерения уровня и влажности (humidity).
- Объяснить принцип измерения рН.
- Обосновать необходимость использования специальной измерительной схемы для измерения рН.
8.2 Измерение уровня
Существует несколько случаев, когда нам необходимо измерить уровень жидкости в емкостях. В некоторых случаях суть проблемы весьма проста - нужно следить за уровнем воды в резервуаре и тогда достаточно простого механизма поплавкового типа. Но в некоторых случаях емкость может быть герметична, а жидкость - горючей или химически-активной, в результате чего процесс мониторинга усложняется. В зависимости от ситуации, существуют различные методы измерения уровня жидкости:
- Поплавкового типа (Float type).
- Датчики гидростатического перепада давления (гидростатический уровнемер, Hydrostatic differential pressure gage type).
- Емкостной тип (Capacitance type).
- Ультразвуковой (Ultrasonic type).
- Зондирование радиационным излучением (Radiation technique).
Некоторые из этих датчиков и техник измерения рассмотрены далее.
8.2.1 Гидростатический уровнемер (Hydrostatic Differential Pressure type)
Первый из рассматриваемых типов сенсоров - гидростатический уровнемер. Принцип его работы основан на перепаде давлений между верхним и нижнем уровнем в емкости и выражается уравнением:
$$ p = \rho g h $$где:
\(h\) - высота уровня жидкости, \(g\) - сила тяготения, а \(\rho\) - плотность жидкости.
Таким образом, поместив два датчика давления внизу и наверху бака, мы можем измерить разность давлений, которая будет зависеть от уровня жидкости (нужна калибровка). Такая схема приведена на рис. 8.1.
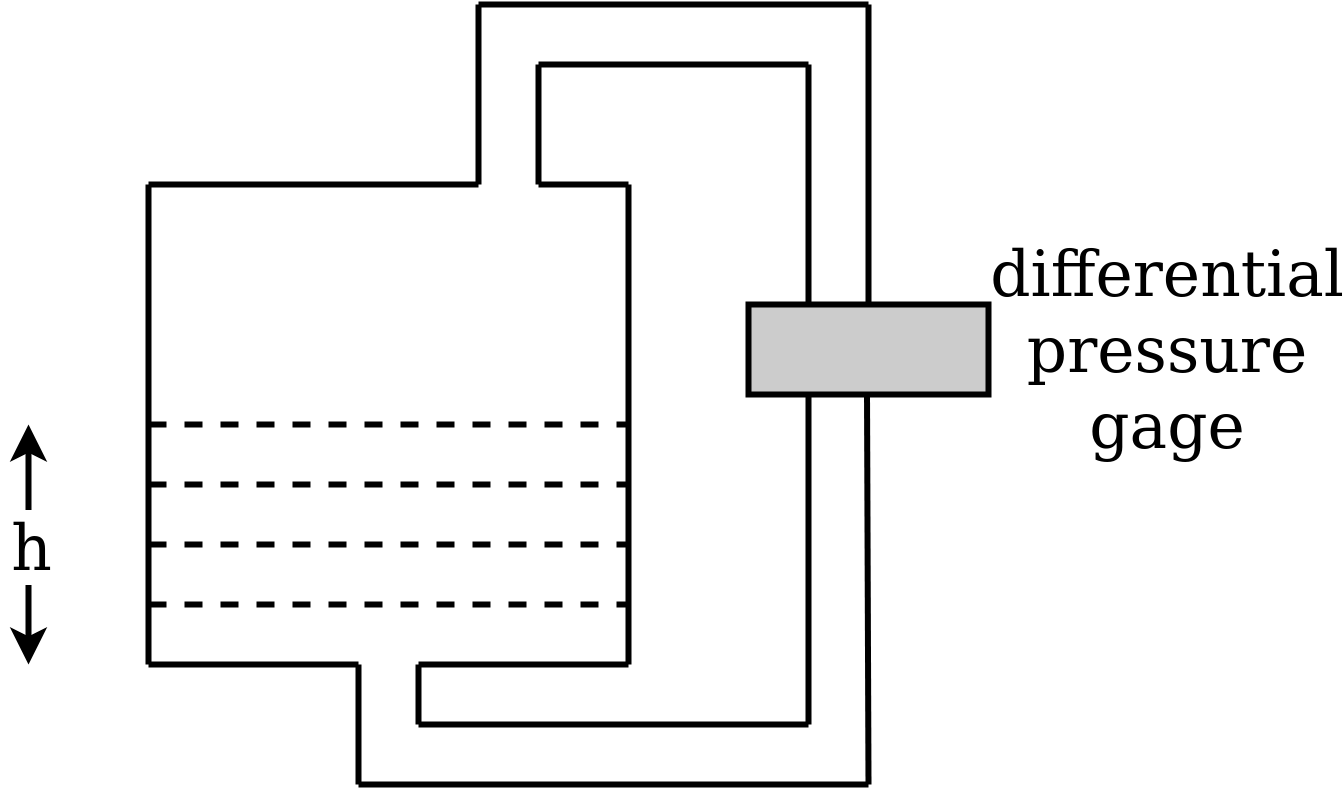
Рис. 8.1. Измерение уровня с помощью гидростатической разницы в давлениях. Примечание. Уровень жидкости в нагревательном котле (drum level of a boiler) обычно измеряется именно таким способом. Однако необходимо проводить аккуратную компенсацию изменения плотности воды с изменением давления и температуры.
8.2.2 Емкостной тип (Capacitance type)
Этот тип датчиков активно применяется в химической и нефтехимический промышленности и может быть использован для широкого диапазона температур (-40 to 200 \(^oC\)) и давлений (25 to 60 \(kg/cm^2\)). Для измерений используется цилиндр коаксиального типа (coaxial type cylinder), а емкость измеряется между внутренней и внешней стенками цилиндра (inner rod and the outer cylinder) - рис. 8.2. Общая емкость между двумя такими "клеммами" (terminals) является сумой:
- емкости изоляционной втулки (insulating bushing) при пустом баке,
- емкости воздуха и паров жидкости,
- емкости жидкости.
Рис. 8.2. Емкостной датчик измерения уровня. Если \(C_1\) - общая емкость пустого бака, то емкость с уровнем жидкости \(h\) может быть выражена как:
$$ C_i = C_1 + \frac{2 \pi \epsilon_0 (\epsilon_1 - \epsilon_2) h}{ln(\frac{r_2}{r_1})} $$где \(\epsilon_1\) - относительная диэлектрическая проницаемость жидкости (relative permittivity) и \(\epsilon_2\) - относительная диэлектрическая проницаемость воздуха и паров жидкости (\(\approx 1\) ).
Таким образом у нас имеется линейная зависимость от уровня жидкости. Еще одним преимуществом датчиком данного типа является то, что диэлектрическая проницаемость жидкости слабо зависит от температуры, а само это слабое влияние может быть легко скомпенсировано. При этом изолирующим слоем (внешним цилиндром) может являться и сам бак.
8.2.3 Ультразвуковой тип (Ultrasonic type)
Ультразвуковой метод может быть использован для измерения уровня жидкости в герметичной емкости, а сам принцип измерения аналогичен ультразвуковому измерению скорости потока кратко рассмотренному в главе 7. Пара передатчик/приемник ультразвукового типа размещается на дне резервуара. Генерируемая ультразвуковая волна может проходить через жидкость, но отражается на границе раздела фаз (жидкость-воздух) - рис. 8.3. Измеряется время, затраченное на прием отраженного импульса, которое зависит от уровня жидкости. Для обеспечения точности измерения необходима компенсация изменения скорости ультразвука от плотности (т.е. и температуры) жидкости.
Рис. 8.3. Ультразвуковой измеритель уровня. 8.2.4 Радиационная методика (Radiation technique)
Еще один метод, который мы обошли стороной в главе 7. Этот способ так же используется для измерения уровня жидкости в герметичных емкостях. Принцип работы основан на ослаблении радиоактивных лучей при прохождении через определенную среду (medium). Интенсивность излучения, прошедшего дистанцию \(x\) задается уравнением:
$$ I(x) = I_0 e^{-\alpha x} $$где
\(I_0\) - начальная интенсивность (incidental intensity) и \(\alpha\) - коэффициент поглощения среды.
Таким образом, если мы знаем \(I_0\), и \(\alpha\), а также измерили конечную интенсивность, то можно рассчитать \(x\).
Могут быть использовано несколько подходов. В первом случае используется поплавок с внутренним радиоактивным источников, который двигается по вертикале в зависимости от уровня жидкости. Приемник в виде счетчика Гейгера-Мюллера (Geiger Muller Counter) при этом располагается на дне резервуара и измеряет интенсивность излучения (рис. 8.4 (а)).
В другом случае используется сборка источник-детектор, который движется по высоте сосуда (рис. 8.4 (б)). Как только блок "источник-детектор" пройдет через границу контакта жидкость-воздух, то сигнал принимаемый детектором сильно изменится. Данный метод часто используется при бутилировании продукции.
Рис. 8.4. Радиационный метод для измерения уровня. Радиоактивные методы, хотя и основаны на простом принципе, находят ограниченное применение из-за возможной радиационной опасности (radiation hazards). Однако подобные подходы нашли широкое применение для измерения уровня зерен и гранулированных твердых частиц в промышленном производстве.
8.3 Измерение влажности (Humidity Measurement)
Измерение влажности находит широкое применение в различных отраслях обрабатывающей промышленности (например, влагосодержание в окружающем воздухе важно для производства полупроводниковых устройств, оптических волокон и т.д., а влажность продукта при сушке контролируется для текстиля, бумага, зерна и т.п.). Влажность может быть выражена разными способами:
- абсолютная влажность (absolute humidity),
- относительная влажность (relative humidity),
- точка росы (dew point).
8.3.1 Гигрометры (Hygrometer)
Множество гигроскопичных материалов чувствительны к содержанию влаги (например, дерево, волосы, бумага и т.д.). Их размеры изменяются в зависимости от поглощённой влаги, что может использоваться при измерениях с использованием предварительной калибровки.
8.3.2 Психрометры (Psychrometer)
Психрометрический метод - является весьма популярным методом измерения относительной влажности. Для этого используются два термометра - с сухой и влажной колбами (dry bulb and wet bulb). Влажная - насыщена водяным паром, а сухая - находится в окружающих условиях. Разница температур между сухой и влажной колбами используется для расчета относительной влажности с помощью психрометрической диаграммы (любимые инженерами и сотрудниками лабораторий калибровочные таблицы, рис. 8.5).
Рис. 8.5. Типичный психрометр, до сих пор его можно часто увидеть в отечественных лабораториях. Изображение взято с сайта wikipedia.org и распространяется по лицензии CC BY-SA 3.0. Стоит понимать, что несмотря на приведенный пример, весь процесс может быть полностью автоматизирован.
8.3.3 Измерение точки росы (Dew point measurement)
Суть этого способа заключается в том, что если охлаждать газ при постоянном давлении, то при достижении точки росы начнется конденсация пара. Точка росы может быть измерена, если в атмосферу такого газа поместить чистое стеклянное зеркало (температура которого контролируется и медленно снижается). При достижении температуры точки росы на зеркале начнется конденсация пара, которую можно задетектировать с помощью оптического метода анализа. При этом полученная температура записывается и по ней рассчитывается влажность окружающей среды.
8.3.4 Метод измерения по проводимости/емкости (Conductance/Capacitance method of measurement)
Многие твердые тела поглощают влагу из окружающей среды (влагосодержание, moisture) и их значения проводимости или емкости изменяются.
Пример. Содержание влаги в гранулах изменяет емкость между двумя электродами, помещенными внутрь. Таким образом, измеряя емкость, может быть рассчитана влажность гранул. Аналогичным образом, содержание влаги в бумаге и текстиле изменяет их сопротивление.
Схема измерения содержания влаги в материале детектора с помощью резистивного моста (Resistance Bridge) показана на рис. 8.6.
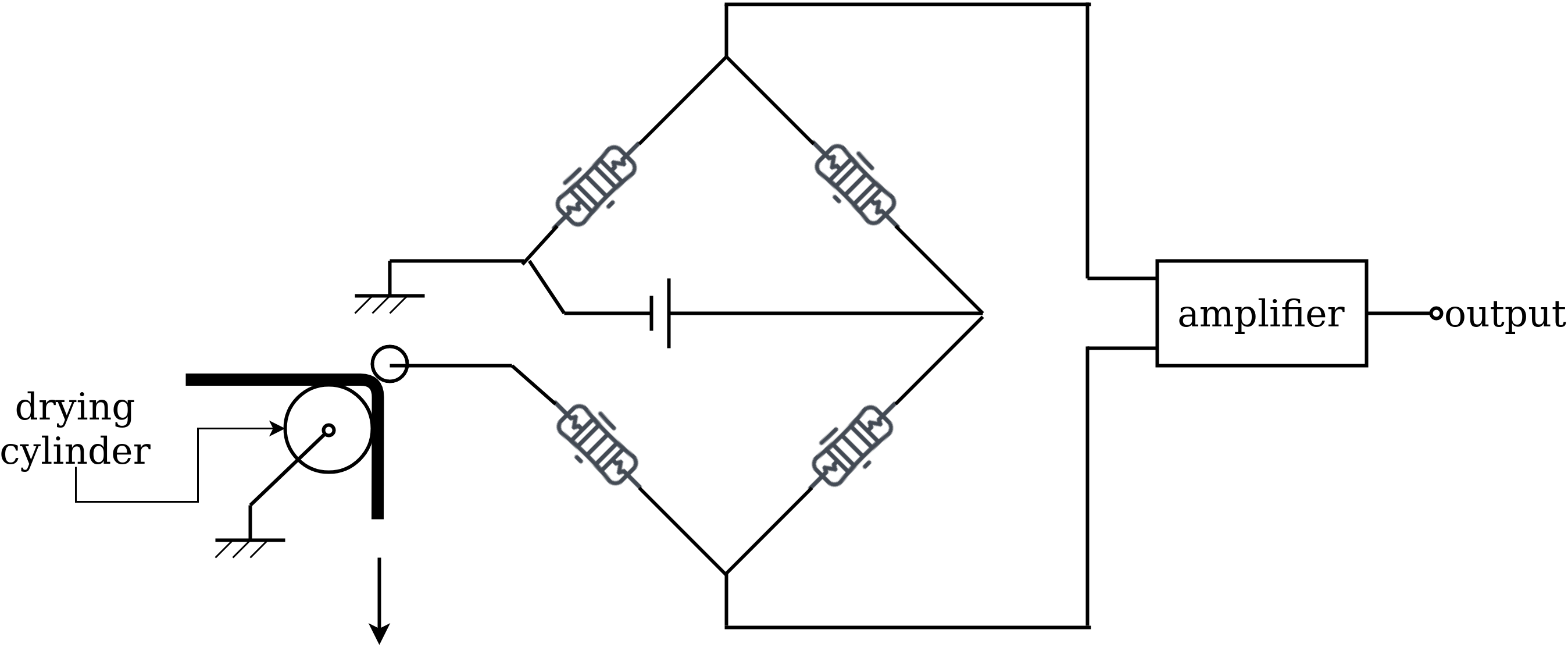
Рис. 8.6. Измерение влагосодержания по проводимости материала. 8.3.5 Инфракрасное измерение (Infrared Technique)
Данный подход основан на прямом взаимодействии с молекулами воды. Эти молекулы присутствуют практически в любом материале и могут активно поглощать инфракрасное излучение с длинами волн 1,94; 2,95 и 6,2 мкм. Степень поглощения на любой из этих длин волн будет связана с количеством молекул воды в измеряемом материале (однако, измерение будет происходить на поверхности).
Данный метод находит все более широкое применение в аналитической практике и автоматизированном контроле. Однако его описание выходит за рамки настоящего пособия.
8.4 Измерение рН (Measurement of pH)
рН - мера содержания ионов водорода в растворе (другими словами - кислотность раствора). Это важный параметр, определяющий общее качество жидкости, в том числе воды. рН выражается как:
$$ pH = \frac{1}{log_{10}C} $$где \(C\) - концентрация ионов \(H^+\) в растворе [моль/л].
В чистой (деионизованной) воде концентрация ионов \(H^+\) составляет \(10^{-7}\) \(\dfrac{моль}{л}\) при \(25^oC\). Таким образом рН:
$$ pH = \frac{1}{log_{10}10^{-7}} = 7 $$Преимущества использования шкалы рН состоит в том, что активность (т.е. сила) всех сильных и слабых кислот и оснований может быть сведена к шкале 0-14. Значение рН кислых растворов (acidic solutions) находится в диапазоне 0-7, а щелочных (alkaline solutions) - в диапазоне 7-14.
Значение рН растворов измеряют с помощью рН-метров. Они обычно состоят из пары электродов (могут выполняться в одном корпусе): измерительного (measuring) и электрода сравнения (reference) (оба погружаются в измеряемый раствор). Эти два электрода по существу образуют две половины электрохимической ячейки общий потенциал которой складывается из потенциалов этих половин. В то время как потенциал электрода сравнения постоянный, потенциал измерительного электрода зависит от концентрации гидрид-ионов и выражается уравнением Нернста (Nernst’s equation):
$$ E = E_0 + \frac{RT}{nF} ln(\alpha C) $$где:
\(E\) - электродный потенциал (e.m.f. of the half cell) [В];
\(E_0\) - стандартный электродный потенциал (при стандартных условиях, emf of the half cell under saturated condition) [В];
\(R\) - газовая постоянная (\(8.314 \frac{Дж}{\text{моль К}}\));
\(T\) - абсолютная температура (K);
\(N\) - валентность иона (количество электронов, участвующих в реакции);
\(F\) - постоянная Фарадея (Faraday Constant, \(96485.33 \frac{Кл}{моль}\));
\(\alpha\) - коэффициент активности (Activity coefficient, \(0 \le \alpha \le 1\)); для очень разбавленных растворов (very dilute solution), \(\alpha \to 1\));
\(C\) - молярная концентрация ионов (molar concentration of ions) [\(\frac{моль}{л}\)].
8.4.1 Электроды для измерения pH (Measuring and reference Electrodes)
Как отмечалось выше, для измерения рН в общем случае используется 2 электрода: измерительный и электрод сравнения.
Измерительный электрод изготавливается из тонкого селективного к \(H^+\) стекла с ионами натрия. При погружении в водный раствор на поверхностях такой стеклянной колбы образуется потенциал, который чувствителен к концентрации ионов \(H^+\) (чувствительность \(59.2 \frac{m v}{pH}\) at \(25^o C\)). Буферный раствор внутри электрода имеет постоянную концентрацию ионов \(H^+\) и обеспечивает электрическое соединение с выводным проводом.
В свою очередь основным назначением электрода сравнения является обеспечение непрерывности электрической цепи, т.к. потенциал не может быть измерен абсолютно (требуется измерить его относительно чего-то). При погружении измерительного и сравнительного электрода в ячейку потенциал измеряется между их проводами. Электрическое соединение электрода сравнения со средой поддерживается через солевой мостик. При этом электрод сравнения должен удовлетворят следующим основным требованиям:
- Развиваемый потенциал должен быть независим от концентрации ионов \(H^+\).
- Потенциал не должен зависеть от температуры.
- Потенциал не должен меняться во времени.
Учитывая данные требования обычно используют два типа электродов сравнения: каломельный (\(Hg - HgCl_2\)) и хлор-серебряный (\(Ag-AgCl_2\)).
Устройство электродов приведено на рис. 8.7.
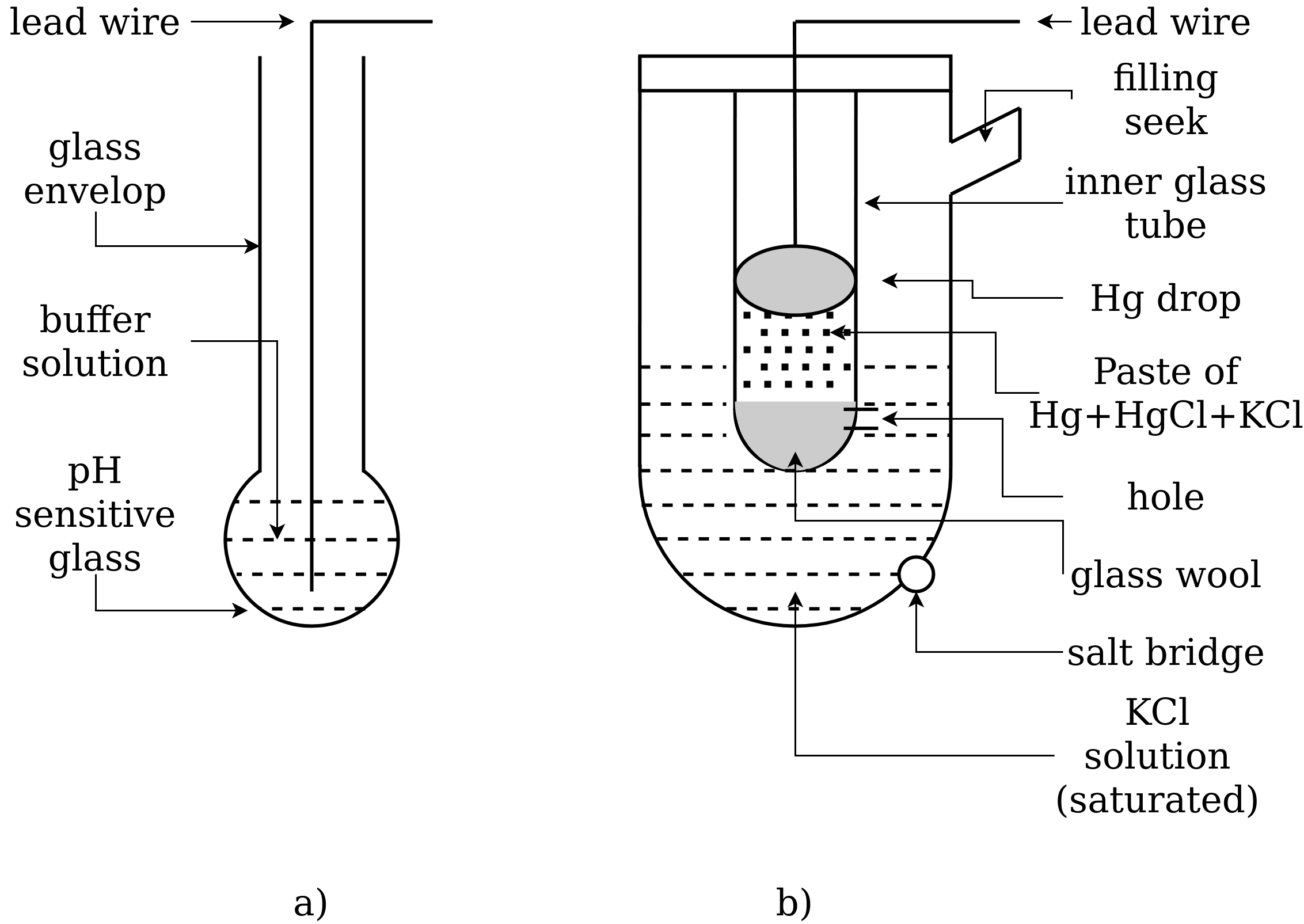
Рис. 8.7. Измерительный электрод (a) и каломельный электрод сравнения (b). Как отмечалось выше, иногда измерительный электрод и электрод сравнения могут быть изготовлены в одном корпусе (рис. 8.8).
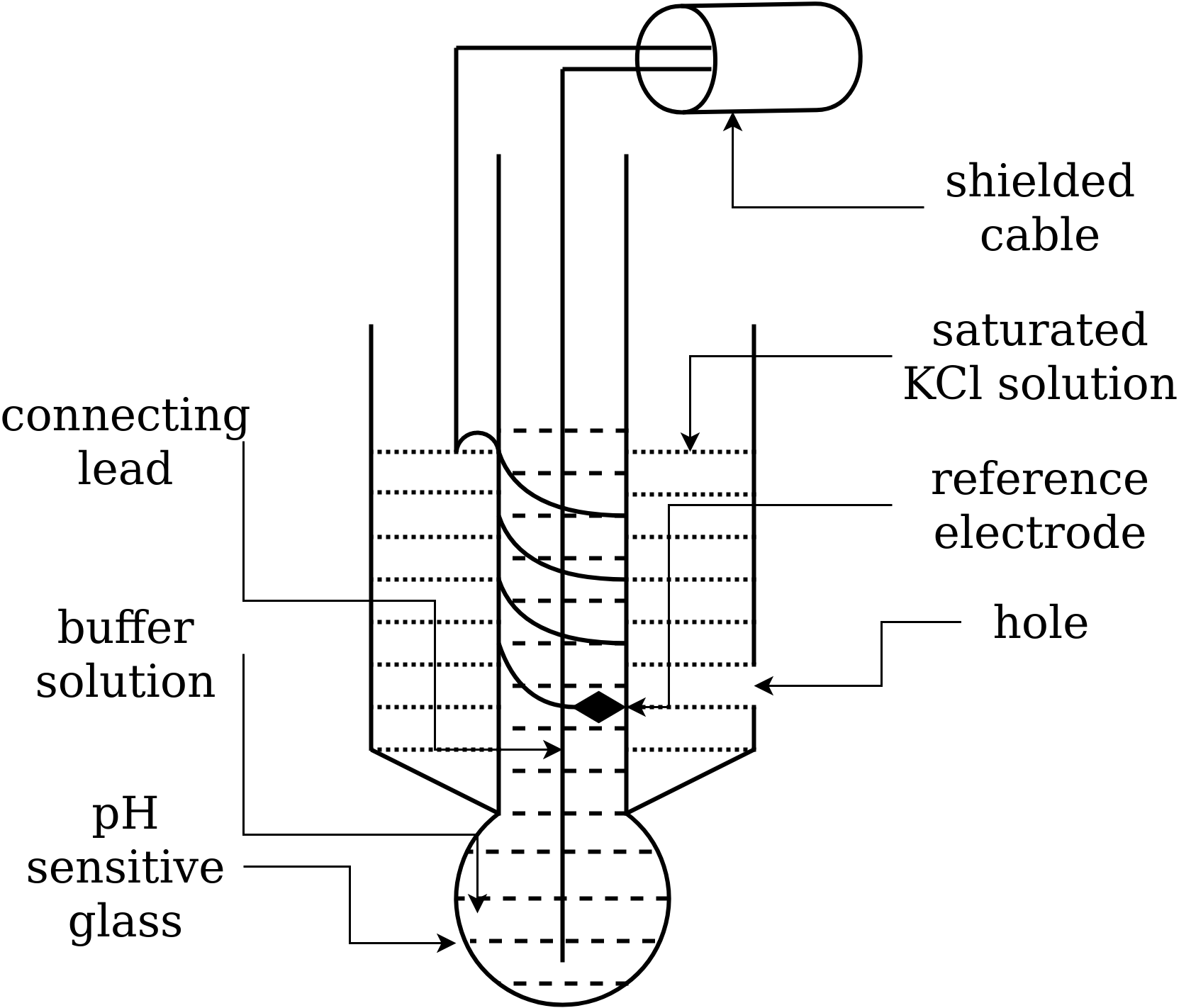
Рис. 8.8. Комбинированный рН электрод. Такой тип электродов называется комбинированным. В таком случае используется хлор-серебряный электрод сравнения.
8.4.2 Схема измерения (Measuring scheme)
Чувствительность рН электрода составляет около \(59.2 \text{ мВ/pH}\) при \(25^o C\). Этой чувствительности должно быть достаточно для измерения напряжения с помощью обычного вольтметра. Однако за счет наличия стеклянной мембраны между проводниками внутреннее сопротивление датчика рН очень велико (порядка \(10^8 - 10^9 \Omega\)) и в результате выходное сопротивление измерительного прибора должно быть как минимум в 10 раз больше сопротивления ячейки, что тяжело осуществимо в реальных условиях. Поэтому требуются специальные измерительные схемы.
Для усиления напряжения с электродов обычно используют усилительные цепи с транзисторами эффекта поля (FET-input amplifier circuits). Кроме того, сопротивление изоляции между выводами также должно быть очень высоким и для этого их обычно снабжают влагостойким изоляционным покрытием.
Примечание. Напряжение в pH-метре зависит от температуры (как видно из уравнения Нернста). Поэтому в измерительной схеме должна быть также предусмотрена подходящая схема температурной компенсации (вспоминаем измерительные мосты).
8.5 Вопросы для проверки
- Как бы вы измерили уровень жидкости в герметичном резервуаре? Приведите схему любого из методов.
- Назовите различные способы, используемые для измерения уровня жидкости. Объяснить принцип работы гидростатического манометра перепада давления.
- Назовите несколько примеров, когда измерение влажности/влагосодержания (humidity / moisture) находит применение в промышленности.
- Как можно измерить содержание влаги в твердых телах? Приведите пример и покажите схему.
- Как можно определить pH раствора. Какова концентрация ионов водорода в растворе, если рН раствора 5,0?
- С использованием схем объясните конструкцию измерительного и эталонного электродов. Почему для измерения pH требуется два электрода?
- Почему при измерении рН должна быть предусмотрена схема температурной компенсации?
- Какие специальные схемы должны быть предусмотрены для усиления напряжения, генерируемого рН-электродом? Обоснуйте.
8.6 Список литературы
- "pH Measurement Handbook" (PDF). PragoLab. Thermo Scientific, Inc. Retrieved 22 March 2017.
- Kumar, Brajesh & Rajita, Gurindapalli & Mandal, Nirupama. (2014). A Review on Capacitive-Type Sensor for Measurement of Height of Liquid Level. Measurement and Control. 47. 219-224. 10.1177/0020294014546943.
- Principles of detection by capacitance level switches
- What are the level switch and level meter?
9. Цепи передачи сигнала (Signal Conditioning Circuits)
9.1 Введение и цели
В данной заключительной главе мы подведем небольшой логический итог работы со всеми возможными датчиками, рассмотрев как передается и измеряется электрический сигнал, который мы получаем на выходе из 99% сенсоров. Как уже отмечалось ранее измерительная система состоит из 3 основных блоков:
- чувствительный элемент (sensing element),
- элемент, передающий сигнал (signal conditioning element),
- элемент, обрабатывающий (формирующий) сигнал (signal processing element) (рис. 9.1)
Примечание. Для лучшего понимания, предлагаю освежить материал из главы 2.

Рис. 9.1. Основные элементы измерительной системы. Чувствительный элемент преобразует не электрический сигнал (например температуру) в электрический (например напряжение, ток, сопротивление, емкость и т.д.).
Работа передающего сигнал элемента заключается в преобразовании различных форм электрических сигналов в напряжение (с уровнем, достаточным для дальнейшей обработки).
Следующим идет элемент, обрабатывающий сигнал. Он принимает выходящий от передающего элемента сигнал и преобразует его в более удобную форму для дальнейшего отображения/обработки (индикация, запись, управление обратной связью и др.). Например, к подобным преобразователям относятся: АЦП (аналого-цифровой преобразователь, Analog-to-digital converters, AD), цепи линеаризации (linearization circuits), измерительные мосты и др..
Успех в проектировании любой измерительной системы для сенсора в значительной степени зависит от конструкции и характеристик применяемых цепей обработки сигнала (signal conditioning circuits). Даже дорогостоящий и точный преобразователь может не обеспечить хороших эксплуатационных характеристик, если схема обработки сигнала спроектирована неверно. Схемы расположения и выбора пассивных и активных элементов данной цепи в значительной степени влияют на характеристики всей измерительной системы. Часто цепь обработки сигнала определяется выходным сигналом чувствительного элемента и в настоящее время многие коммерческие датчики имеют встроенную схему обработки сигнала. Такая компоновка помогает решить проблему несовместимости чувствительного элемента и цепи формирования (обработки) сигнала.
Если посмотреть на различные поперечные сечения чувствительных элементов и изучить схемы формирования сигнала, то можно заметить, что большинство из них используют стандартные блоки, такие как мосты (AC и DC bridges), усилители (amplifiers), фильтры (filters) и фазовые чувствительные детекторы (phase sensitive detectors) для формирования сигнала. В этой главе мы сконцентрируемся в основном на мостах и усилителях и поразмышляем над общими вопросами проектирования.
После изучения главы нужно уметь:
- Определить различные блоки измерительной системы и объяснить назначение каждого блока.
- Спроектировать несбалансированный измерительный мост (unbalanced Wheatstone bridge) и определить его чувствительность и другие параметры.
- Объяснить преимущества использования конфигурации "push-pull" (двухтактную) в несбалансированных мостах AC и DC.
- Дать определение CMRR усилителю и объяснить принцип его действия для усиления дифференциального сигнала (differential signal).
- Сравнить характеристики одиночных входных усилителей (инвертирующих и не инвертирующих) (single input amplifiers (inverting and non-inverting)) с точки зрения усиления и входного импеданса.
- Рассчитать выражение коэффициента усиления three-op.amp. instrumentation amplifier.
9.2 Несбалансированный мост постоянного тока (Unbalanced D.C. Bridge)
На данный момент мы чаще сталкивались со сбалансированным измерительным мостом (мост Уитстона, Wheatstone bridge), чем с его аналогом - не сбалансированными. Там не менее, последний получил широкое распространение в области приборостроения. Для иллюстрации несбалансированного DC моста рассмотрим схему на рис. 9.2.
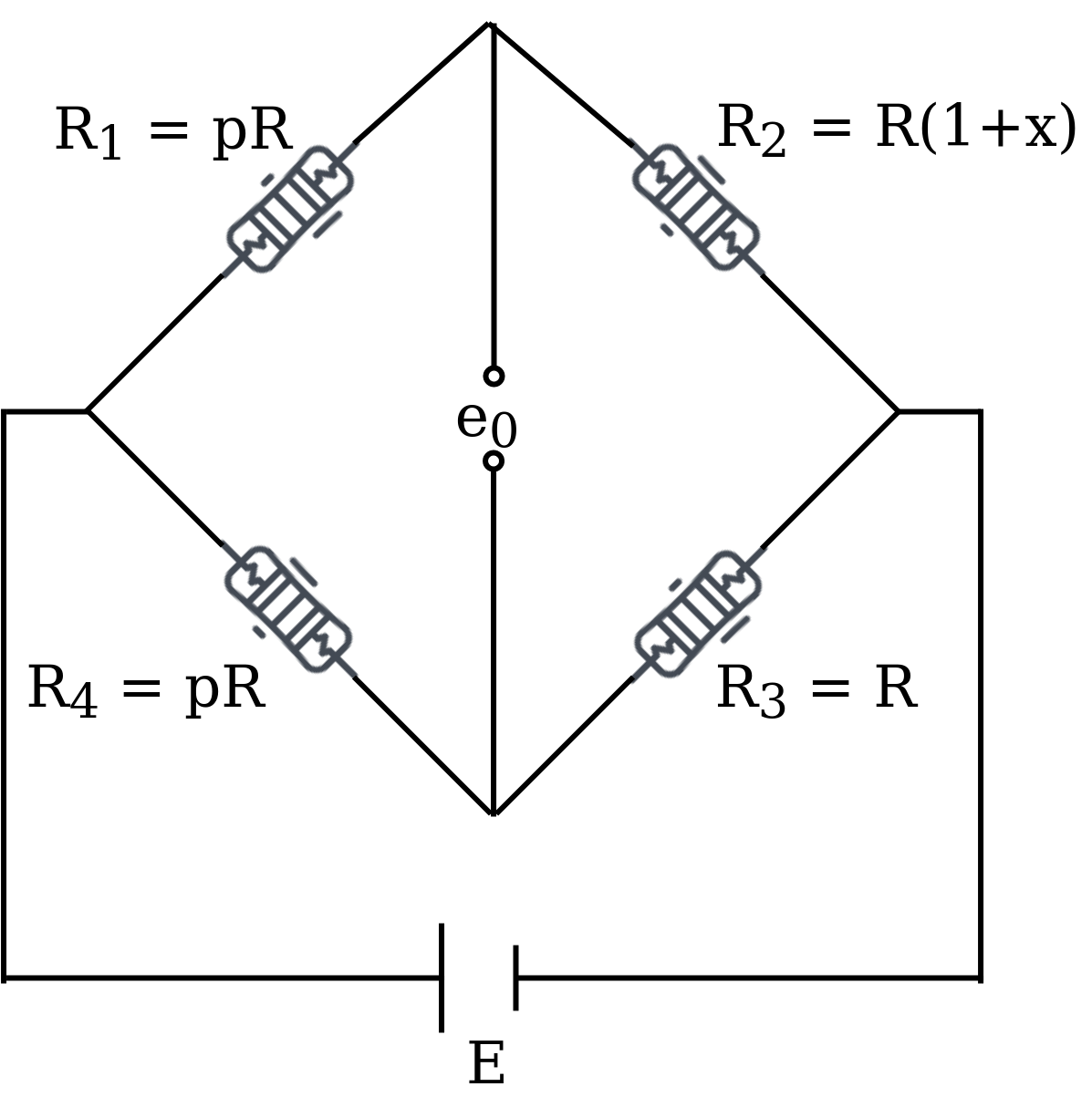
Рис. 9.2. Несбалансированный мост постоянного тока. Допустим, переменная сопротивление (\(R_2 = R(1+x)\)) - это сенсор, чье сопротивление меняется в зависимости от производственных параметров. Тогда \(e_0\) - выходящее напряжение, которое будет изменяться пропорционально сопротивлению сенсора \(x\) (\(= \frac{\Delta R}{R}\)). При этом \(p\) - плечевое отношение (arm ratio) для моста, а \(E\) - напряжение возбуждения.
Тогда,
$$ e_0 = [\frac{R(1+x)}{pR + R(1+x)} - \frac{R}{pR+R}]E = \frac{px}{(p+1+x)(p+1)} E $$Исходя из приведенной формулы можно сделать несколько выводов:
- Зависимость \(e_0\) VS \(x\) нелинейна (поскольку \(x\) представлен и в числителе и в знаменателе).
Максимальная чувствительность моста может быть достигнута для плечевого отношения \(p = 1\).
Вышеизложенное может быть проверено путем дифференцирования \(e_0\) относительно \(p\) и путем сравнения с 0 (это стандартная процедура поиска экстремума).
$$ \frac{de_0}{dp}=0 $$получаем,
$$ x(p+1+x)(p+1)-px(2p+2+x) = 0 $$или
$$ p^2 = 1 + x $$т.е. \(p = \sqrt{1+x} \approx 1\), для малых \(x\).
Нелинейность моста уменьшается с возрастанием плечевого отношения \(p\), но при этом уменьшается чувствительность.
Этот факт может быть проверен путем построения графика \(\frac{e_0}{E}\) vs. \(x\) для различных \(p\) (рис. 9.3).
Рис. 9.3. Характеристики моста для разных плечевых отношений. Для единичного плечевого отношения (коэффициент рычага) (\(p=1\)) и для малых \(x\), мы можем получить приблизительно линейную связь
$$ \begin{equation}\begin{aligned} e+0 = \frac{x}{4} E \end{aligned}\end{equation} \tag{9.1}\label{eq9.1} $$Как было показано в п.2, максимальная чувствительность моста достигается при плечевом отношении \(p = 1\). Вместо того, что бы выравнять все сопротивления \(R_1\), \(R_2\), \(R_3\), \(R_4\) (сбалансированная схема), данное плечевое отношение может быть достигнуто и путем выбора различных сопротивлений. Их нужно выбирать так, чтобы \(R_1 = R_2\), \(R_3 = R_4\) для \(x = 0\). Однако в большинстве случаев делать это не целесообразно, поскольку выходной импеданс (сопротивление) моста будет выше. Исходя из требования низкого выходного сопротивления элемента, формирующего сигнал, лучше спроектировать основной мост со всеми равными сопротивлениями.
Из вышеприведенных рассуждений может показаться, что нет никаких ограничений на выбор возбуждающего напряжения для моста. Более того, казалось бы чем больше входное напряжение, тем больше чувствительность для выходного напряжения. Однако ограничение на входное напряжение связано с допустимым рассеянием мощности на резисторах. Если мы повышаем входное \(E\), это вызовет бОльшую потерю мощности на элементах сопротивления. А если потеря мощности превысит допустимый порог рассеяния, то произойдет самонагрев (self heating) резисторов и сенсора. В этом случае опять произойдет повышение температуры на резисторе, что опять изменит сопротивление и потерю мощности (цепная реакция). Зачастую это приводит к необратимому повреждению датчика (сгорит).
Двухконтактная схема (Push-Pull configuration)
Характеристики несбалансированного измерительного моста с одним элементом сопротивления на плече могут быть значимо улучшены с использованием двухконтактной схемы. Данная схема состоит из двух одинаковых элементов сопротивления в соседних плечах: пока сопротивление датчика падает, сопротивление на другом датчике возрастает на ту же величину (рис. 9.4).
Рис. 9.4. Несбалансированный мост постоянного тока с "push-pull" конфигурацией. Несбалансированное напряжение может быть рассчитано как:
$$ e_0 = [\frac{R(1+x)}{R(1+x)+R(1-x)} - \frac{R}{2R}]E = [\frac{1+x}{2} - \frac{1}{2}]E = \frac{x}{2}E $$Исходя из приведенного выражения можно заметить преимущества предложенной схемы. Во-первых, нелинейность моста может быть полностью устранена. Во-вторых, чувствительность увеличивается в 2 раза по сравнению с мостом с одним сенсором. Подобное решение может быть использовано и для AC мостов с индуктивными или емкостными сенсорами. Подобное применение описано ниже.
9.3 Насбалансированный мост переменного напряжения с двухконтактной схемой (Unbalanced A.C. Bridge with Push-Pull configuration)
На рис. 9.5 приведена схема несбалансированного двухконтактного АС моста с индуктивными или емкостными датчиками. Здесь возбуждающий DC сигнал заменен на источник AC и два одинаковых фиксированных сопротивления (расположенных на соседних плечах). При этом индуктивные (или емкостные) сенсоры расположены таким образом, что при увеличении одной индуктивности (емкости) другая уменьшается на такое же количество.
Рис. 9.5. Насбалансированный мост переменного напряжения с "push-pull" конфигурацией для a) индуктивного сенсора и b) для емкостного сенсора. Для рис. 9.5(a),
$$ e_0 = [\frac{jwL(1+x)}{jwL(1+x) + jwL(1-x)} - \frac{R}{2R}]E $$где \(\omega\) - угловая частота возбуждения (angular frequency of excitation), \(L\) - номинальное значение индуктивности и \(x = \frac{\Delta L}{L}\).
Упростив выражение, получим доказательство линейных характеристик измерительного моста:
$$ \begin{equation}\begin{aligned} e_0 = \frac{x}{2}E \end{aligned}\end{equation} \tag{9.2}\label{eq9.2} $$Для емкостного датчика (рис. 9.5(б)):
$$ \begin{equation}\begin{aligned} e_0 = [\frac{\frac{1}{jwC(1+x)}}{\frac{1}{jwC(1+x)} + \frac{1}{jwC(1-x)}} - \frac{R}{2r}]E =\\ [\frac{jwC(1-x)}{jwC(1+x) + jwC(1-x)} - \frac{R}{2R}]E = -\frac{x}{2} E \end{aligned}\end{equation} \tag{9.3}\label{eq9.3} $$где \(x = \frac{\Delta C}{C}\).
Как и ожидалось, здесь также получены линейные характеристики (вне зависимости от значения \(x\)). Но есть небольшое отличие от предыдущего выражения (\(\eqref{9.2}\) и \(\eqref{9.3}\)) - отрицательный знак. Этот отрицательный знак для АС моста показывает, что выходящее напряжение на рис. 9.4(б) будет на \(180^o\) в противофазе со входящим напряжением \(E\). Однако мы не сможем обнаружить эту разницу, если будем использовать простой АС вольтметр для измерения выходящего напряжения. Фактически, если бы значение \(x\) само было отрицательным, то это вызвало бы аналогичный эффект сдвига фаз, который мы не смогли бы обнаружить без специального оборудования для определения фазы.
Описанный тип схемы называется фазочувствительным устройством (PSD) и оно часто используется в сочетании с индуктивными и емкостными датчиками. Цепь PSD выпрямляет небольшое AC напряжение в DC. При этом полярность выходного напряжения в DC меняется на противоположную (имеет место смена фазы).
Емкостной усилитель (Capacitance Amplifier)
Здесь приводиться другая конфигурация, приемлемая для емкостной двухконтурной схемы с сенсором. Сама схема может быть определена как полумост и ее типичная конфигурация приведена на рис. 9.6.
Рис. 9.6. Емкостной усилитель (сенсор отмечен как подстраиваемая емкость). В схеме последовательно соединены два идентичных источника напряжения с общим заземлением. Такой же эффект может быть достигнут с помощью трансформатора с центральным заземлением. Два сенсора-конденсатора \(C_1\) и \(C_2\) соединены, как показано на рис. 9.5. При этом несимметричный ток проходит через цепь усилителя с конденсатором обратной связи \(C_f\). Тогда переменный ток через конденсаторы:
$$ I_1 = VjwC_1 $$и
$$ I_2 = -VjwC_2 $$Несбалансированный ток составит:
$$ I = I_1 + I_2 = Vjw(C_1 - C_2) $$Выходящее напряжения от усилителя:
$$ V_0 = -\frac{I}{jwC_f} = -\frac{C_1 - C_2}{C_f} V $$Таким образом мы получили линейный отклик. При этом его также можно получить, подключив конфигурацию "push-pull" емкостного сопротивления (рис. 9.6). Усиление схемы может быть скорректировано с помощью переменной величины \(C_f\).
Стоит понимать однако, что мы рассмотрели идеальную схему. Для реальной схемы высокое сопротивление должно быть расположено параллельно с \(C_f\).
9.4 Усилители (Amplifiers)
Усилитель является неотъемлемой частью любой схемы формирования сигнала. При этом существуют различные конфигурации усилителей и нужно уметь выбирать подходящую схему в зависимости от типа задач.
9.4.1 Инвертирующий и не инвертирующий усилители (Inverting and Non-inverting Amplifiers)
Эти два типа усилителей представляют собой устройства с одним выходом (при этом один из входов заземлен). Из схем этих двух популярных усилителей, показанных на рис. 9.7, видно, что коэффициент усиления по напряжению для инвертирующего усилителя:
$$ \frac{e_0}{e_i} = - \frac{R_2}{R_1} $$Тогда как коэффициент от не инвертирующего усилителя:
$$ \frac{e_0}{e_i} = 1 + \frac{R_2}{R_1} $$
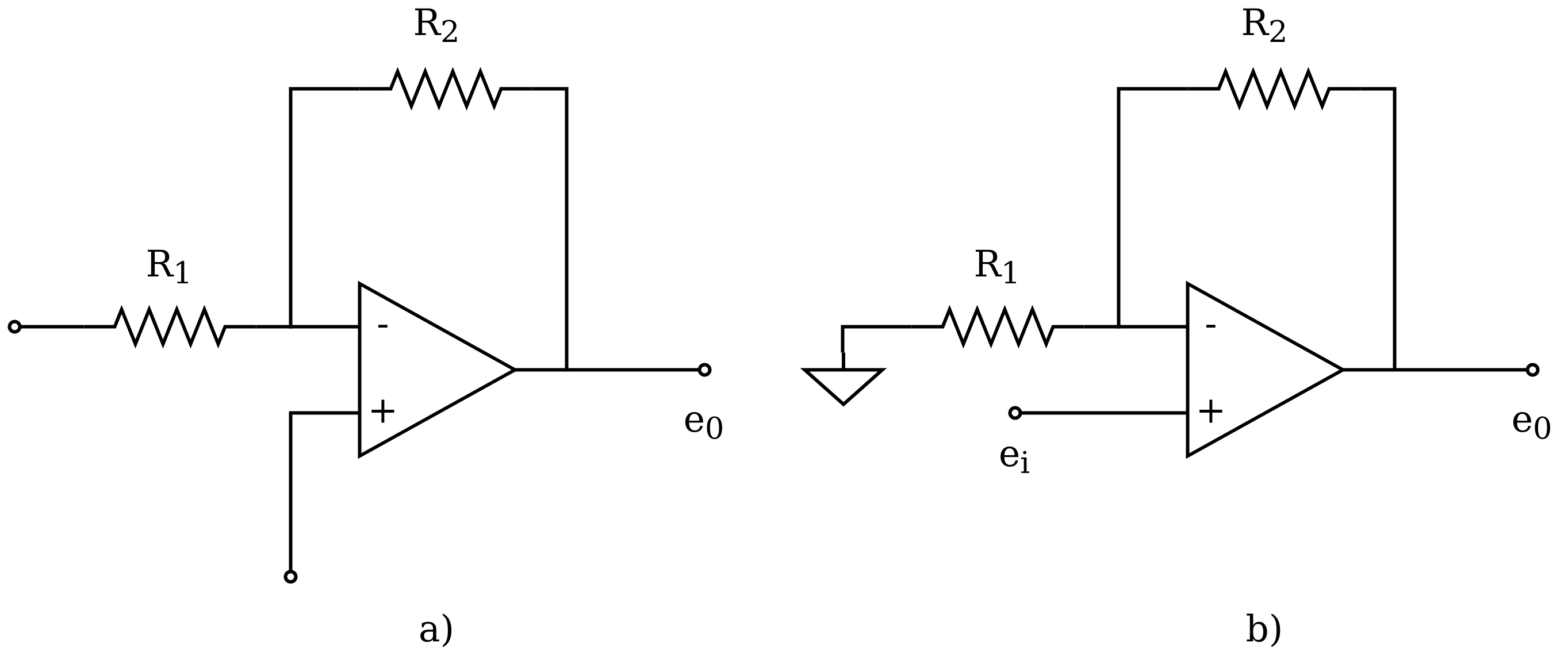
Рис. 9.7. Инвертирующий усилитель (a) и не инвертирующий усилитель (b). Очевидно, что оба усилителя способны обеспечить любое желаемое усиление по напряжению (при условии, что фазовая инверсия не представляет проблемы для первого случая). Но в приведенных схемам можно заметить, что входное сопротивление инвертирующего усилителя конечное и составляет примерно \(R_1\), в то время как не инвертирующий усилитель имеет бесконечное входное сопротивление.
Определенно, второй усилитель будет работать лучше, если мы хотим чтобы усилитель не загружал датчик (или мостовую схему).
9.4.2 Дифференциальный усилитель (Differential Amplifier)
Дифференциальный усилитель — электронный усилитель с двумя входами, выходной сигнал которого равен разности входных напряжений, умноженной на константу. Применяется в случаях, когда необходимо выделить небольшую разность напряжений на фоне значительной синфазной составляющей. Такие усилители полезны в тех случаях, когда обе входные клеммы являются инвертирующими, а сами усилители находят широкое применение в приборостроении. Типичный дифференциальный усилитель с одиночной конфигурацией усилителя (single op.amp. configuration) показан на рис. 9.8.
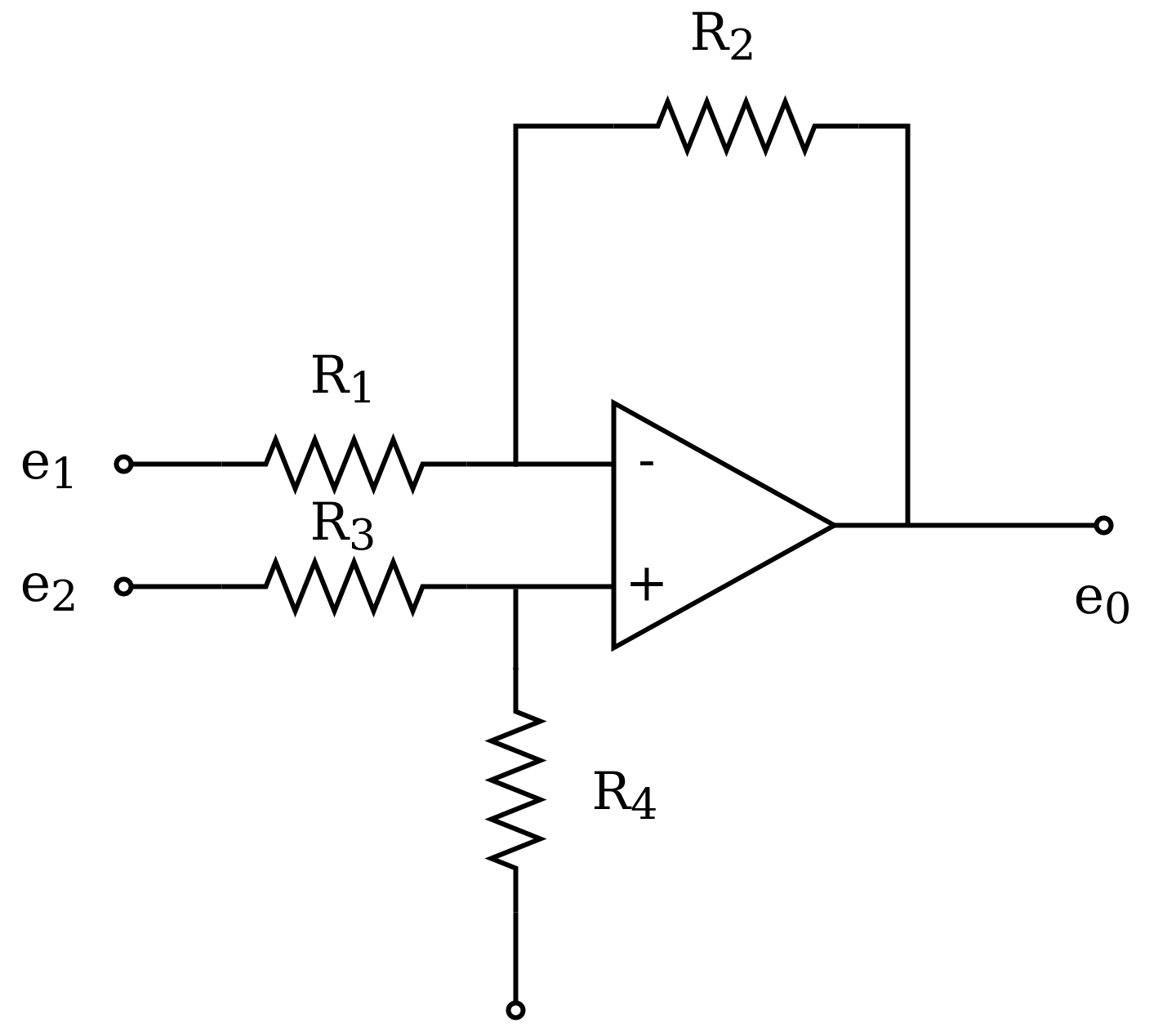
Рис. 9.8. Дифференциальный усилитель. Применяя теорему о суперпозиции (superposition theorem), можно получить вклад каждого входа и добавить их алгебраически, чтобы получить выходное напряжение в виде:
$$ e_0 = \frac{R_4}{R_3 + R_4} (1+\frac{R_2}{R_1}) e_2 - \frac{R_2}{R_1} e_1 $$Если мы выберем сопротивления таким образом, что \(\frac{R_4}{R_3} = \frac{R_2}{R_1}\), то выходящее напряжение будет:
$$ \begin{equation} \begin{aligned} e_0 = \frac{R_2}{R_1} (e_2-e_1) \end{aligned}\end{equation} \tag{9.4}\label{eq9.4} $$Однако такой тип дифференциального усилителя (с одним операционным усилителем, single op. amp.) также страдает от ограничения предельного входного сопротивления. Фактически, для оценки характеристик усилителя используется несколько критериев:
- смещение и дрейф (offset and drift),
- входной импеданс (input impedance),
- усиление и пропускная способность (gain and bandwidth),
- коэффициент отклонения общего режима (common mode rejection ratio, CMRR).
Эксплуатационные характеристики операционного усилителя оцениваются по коэффициенту усиления в полосе пропускания (который указывается в спецификации производителя). В разомкнутом контуре коэффициент усиления очень высок (около \(10^5\)), но полоса пропускания очень мала. В замкнутом контуре коэффициент усиления низкий, но достижимая ширина полосы пропускания высока. Обычно коэффициент усиления в однокаскадной операционной схеме усилителя (single stage operational amplifier circuit) ограничен примерно 10, поэтому достижима большАя ширина полосы пропускания. При этом для достижения бОльшего усиления можно объединять несколько усилителей в каскад (cascade).
Коэффициент CMRR является очень важным параметром для КИПиА (instrumentation circuit applications). Желательно использовать усилители с высокой CMRR при подключении к измерительным схемам. Сам коэффиуиент CMRR определяется как:
$$ CMRR = 20 log_{10}\frac{A_d}{A_c} $$где:
\(A_d\) это дифференциальное модовое усиление (differential mode gain), а \(A_c\) это общее модовое усиление (common mode gain) усилителя.
Важность использования усилителя с высокой CMRR можно объяснить следующим примером:
Пример. Несбалансированное напряжение измерительного моста по сопротивлению должно быть усилено в 200 раз с помощью дифференциального усилителя. Конфигурация показана на рис. 9.9 с \(R = 1000 \Omega\) и \(x = 2 \times 10^{-3} \Omega\). Имеются два усилителя: один с \(A_d = 200\) и \(CMRR = 80 дБ\), а другой с \(A_d = 200\) и \(CMRR = 60 дБ\). Найдите значения \(V_0\) для обоих случаев и вычислите ошибки.
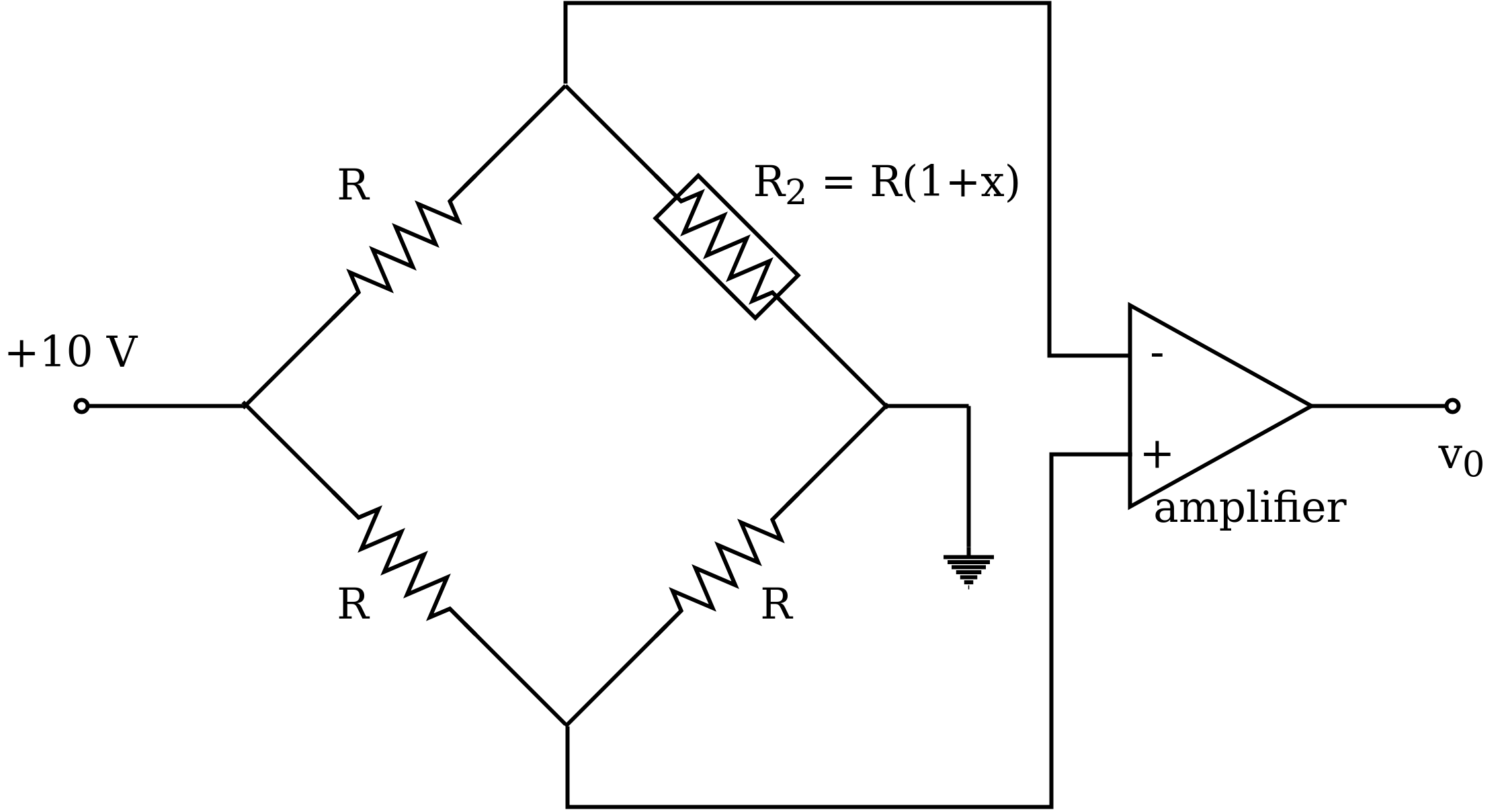
Рис. 9.9. Измерительная схема к задаче. Решение
Здесь \(x = 2 \times 10^{-3} \Omega\). Используя \(\eqref{9.1}\),
$$e_i = \frac{x}{4} x 10 = 5 mv = v_d$$Общая мода напряжения для усилителя \(v_c = 5 V\) (половина напряжения питания). Для усилителя 1: \(A_d = 200\), \(20 log \frac{A_d}{A_c}=80 dB\)
Тогда, \(\frac{A_d}{A_c} = 10^4\), или, \(A_c = \frac{200}{10^4}=0.02\).
Таким образом, \(v_0 = A_d v_d + A_c v_c = 200 \times 5 \times 10^{-3} + 0.02 \times 5 = 1.1 V\)
В идеале, напряжение должно составлять 1.0 V для усиленного в 200 раз исходного сигнала (в случае несбалансированого моста). Однако из-за присутствия мостового несбалансированного напряжения достигается ошибка в 10%.
Во втором случае, CMRR составляет 60 dB (все остальное остается таким же). В данном случае \(A_c = \frac{200}{10^3} = 0.2\) Таким образом,
\(v_0 = A_d v_d + A_c v_c = 100 \times 5 \times 10^{-3} + 0.2 \times 5 = 2.0 V\)
И рассчитанная погрешность в 100% появляется из-за общего напряжения!
Ссылаясь на рис. 9.8, при условии что операционный усилитель идеальный и сопротивление выбрано таким, что \(\frac{R_4}{R_3} = \frac{R_2}{R_1}\) мы можем полностью устранить влияние общего напряжения (видно из примера \(eqref{9.4}\)). Однако если значения сопротивлений отличаются (например, из-за допусков резисторов), то общее напряжение приведет к большОй ошибке в усиленном выходном напряжении. Альтернативой рассмотренной схеме в приведенном выше примере является применение на клеммах мостового питания (bridge supply terminals) +5 и -5В, вместо +10 В и 0 В.
9.4.3 Измерительный усилитель (Instrumentation Amplifier)
Часто в приборостроении необходимо усиливать небольшое дифференциальное напряжение в несколько сотен раз. Одноступенчатый дифференциальный усилитель (рис. 9.8) не способен эффективно выполнять эту работу по нескольким причинам:
- Входной импеданс конечен. Более того, достижимое усиление в однокаскадном усилителе ограничено из-за полосы пропускания.
- Из-за ограничений, связанных со смещением тока в операционном усилителе.
Улучшенной версией рассмотренного ранее однокаскадного усилителя является инструментальный усилитель из 3 операционных усилителей (three op. amp. Instrumentation amplifier, а рис. 9.10).
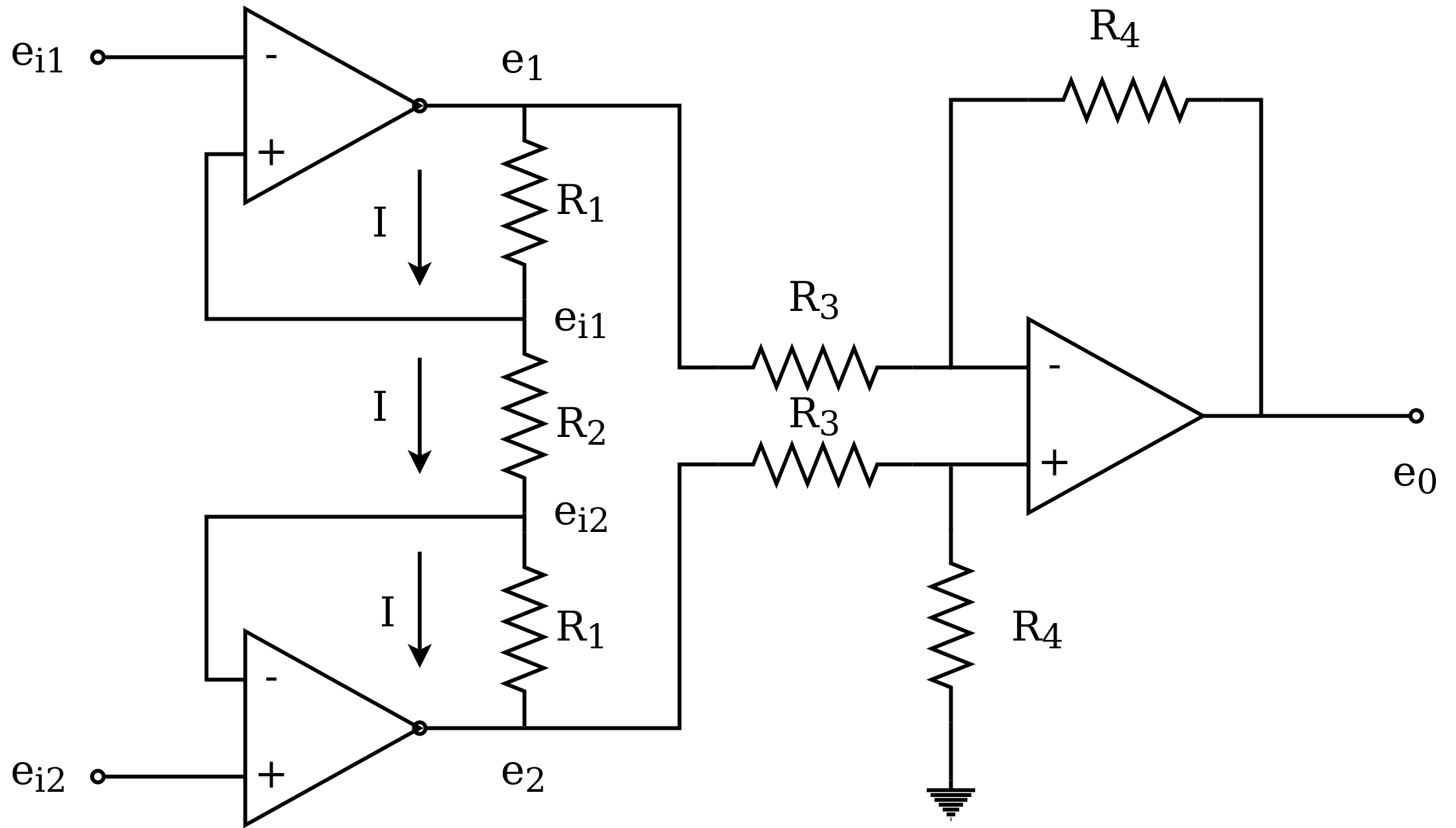
Рис. 9.10. Инструментальный усилитель, состоящий из 3 операционных усилителей. Основные свойства:
- высокое дифференциальное усиление (регулируемое до 1000);
- бесконечный входной импеданс;
- большой коэффициент CMRR (80 дБ и более);
- умеренная полоса пропускания.
Из рис. 9.10 видно, что входной каскад операционного усилителя не заглушает ток (поскольку вход подается на не инвертирующие входные клеммы). Таким образом, достигается второе свойство, упомянутое выше. Если посмотреть на входной каскад, то через сопротивления \(R_1\) и \(R_2\) протекает тот же самый входной ток \(I\). Используя свойства идеального операционного усилителя, мы можем получить ток:
$$ I = \frac{e_1 - e_{i1}}{R_1} = \frac{e_{i1}-e_{i2}}{R_2} = \frac{e_{i2} - e_2}{R_1} $$Далее мы получим напряжение
$$ e_1 = e_{i1} + \frac{R_1}{R_2} (e_{i1} - e_{i2}) $$$$ e_2 = e_{i2} - \frac{R_1}{R_2} (e_{i1} - e{i2}) $$Таким образом,
$$ e_1 - e_2 = (1+\frac{2R_1}{R_2})(e_{i1} - e{i2}) $$Следующий (второй) каскад инструментального усилителя является простым дифференциальным усилителем, и, следовательно, используя \(\eqref{9.4}\) по всему коэффициенту усиления:
$$ e_0 = \frac{R_4}{R_3}(e_2-e_1) = \frac{R_4}{R_3}(1+\frac{2R_1}{R_2})(e_{i2}-e_{i1}) $$Таким образом, варьируя \(R_2\) можно получить очень большой выигрыш (но соотношение обратное). При этом полоса пропускания не страдает (так как за усиление отвечают три операционных усилителя).
Примечание. На рынке представлено множество коммерчески доступных одночиповых инструментальных усилителей. Их коэффициент усиления можно настроить, подключив внешнее сопротивление или выбрав коэффициент усиления (50, 100 или 500) через перемычку.
9.5 Заключение
При проектировании схемы формирования сигнала необходимо учитывать несколько моментов. Линейность, чувствительность, эффект загрузки, ширина полосы пропускания, отклонение общего режима (Linearity, sensitivity, loading effect, bandwidth, common mode rejection) - важные вопросы, влияющие на работу схем формирования сигнала. В этом уроке мы узнали о различных конфигурациях несбалансированных мостов постоянного и переменного тока, подходящих для резистивных, емкостных преобразователей и преобразователей индуктивного типа. Кроме характеристик различных типов усилителей, использование общих операционных усилителей было также подробно рассмотрены. Однако реальная конструкция зависит от конкретного используемого сенсорного элемента и его характеристик.
Несколько других типов схем формирования сигнала (например, фазовый чувствительный детектор, фильтры и многие другие) были оставлены без внимания в ходе обсуждения (добавить).
9.6 Вопросы для проверки
- Медный детектор температурного сопротивления имеет сопротивление \(100 \Omega\) при \(0^o C\). Коэффициент температурного сопротивления меди составляет \(\frac{0.00427}{^oC}\) при \(0^o C\). Чувствительный элемент помещен в несбалансированный измерительный мост как показано на рис. 9.2, остальные плечи имеют фиксированное сопротивление по \(100 \Omega\). Постройте зависимость несбалансированного напряжения от температуры для диапазона температуры от \(0^o C\) до \(100^o C\), если напряжение возбуждения \(E = 2V\). Являются ли характеристики линейными или нелинейными? Обоснуйте свой ответ.
- Объясните преимущество использования схемы "push-pull" в мостовой схеме.
- Для какого плечевого отношения достигается максимальная чувствительность несбалансированного измерительного моста?
- Не инвертирующий усилитель обеспечивает более высокий входной импеданс измерительной схемы по сравнению с инвертирующим усилителем - обоснуйте это.
- Дайте определение коэффициента CMRR операционного усилителя. Почему важен его учет при проектировании измерительной системы?
- Разработайте дифференциальный усилитель с коэффициентом усиления 10 и нарисуйте его схему.
- Приведите основные особенности инструментального усилителя.
- Схема дифференциального усилителя, показанная на рис. 9.8, имеет сопротивления: \(R_1 = 10K\), \(R_2 = 100 K\), \(R_3 = 11 K\) и \(R_4 = 100 K\). Допустим, операционный усилитель является идеальным, найдите коэффициент CMRR усилителя.
- Простая схема усилителя емкости показана на рисунке 9.11. \(C_1\) представляет собой емкостный датчик, номинальное значение которого составляет 50 пФ. \(C_2\) - фиксированный конденсатор 25 пФ. Найдите выходное напряжение при синусоидальном напряжении возбуждения 1В с пиком на частоте 1 кГц предположив, что операционный усилитель является идеальным.
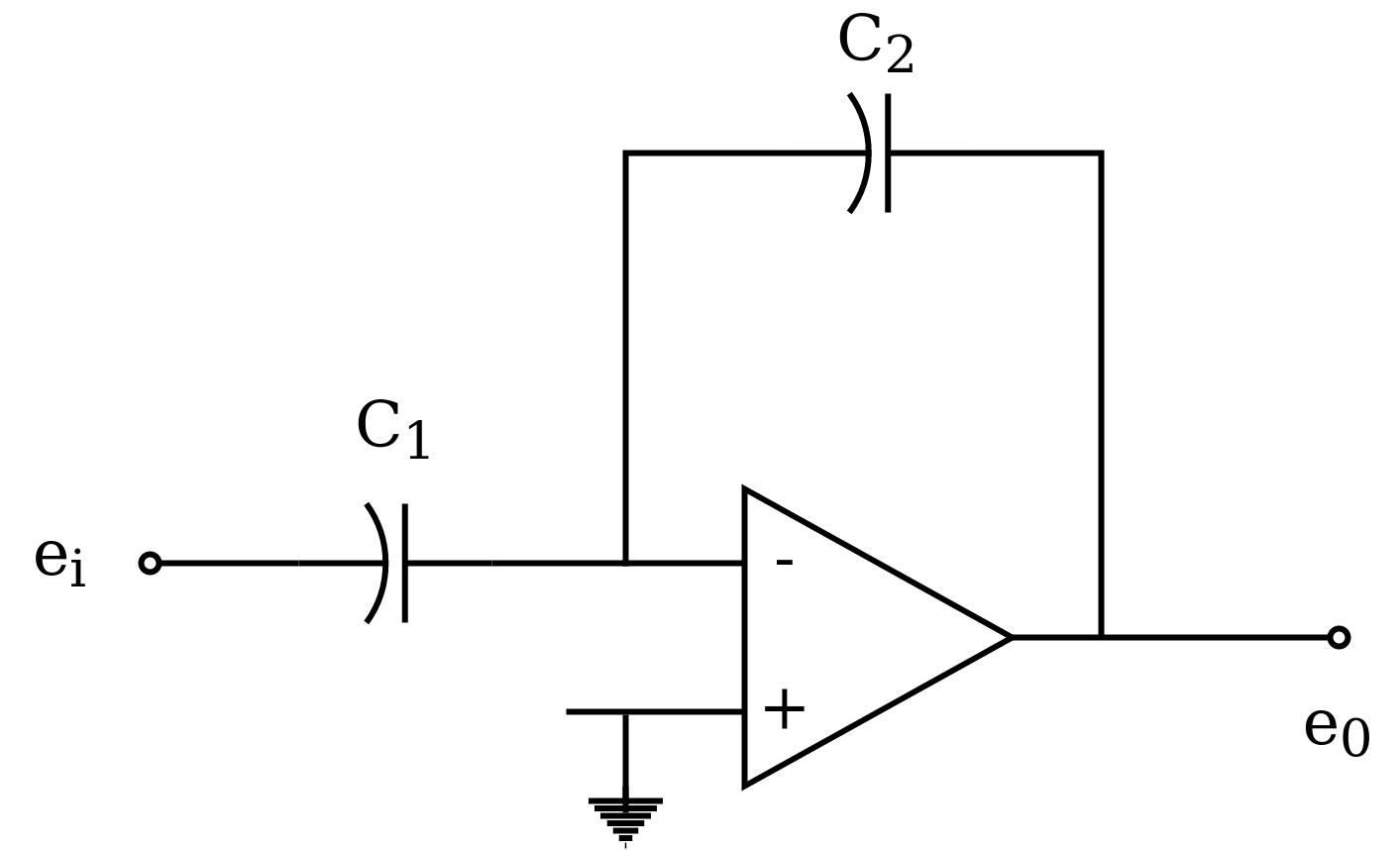
Рис. 9.11 Задача 9.1. 9.7 Ссылки на источники
- Industrial Automation and Control course from NPTEL
- Instrumentation today
- IDC Technologies
- Measurement and Instrumentation. Theory and Application. Book. 2nd Edition • 2016
- Instrumentation Reference Book. Book. 4th Edition. 2010
- Caltech course CDS 101/110, Fall 2004, Analysis and Design of Feedback Systems
- Help in translate: Deepl.com
- Help with HTML table
- Perfect tools for construct diagrams: draw.io
10. Заключение
В заключение этой небольшой статьи-пособия хочется подвести небольшой итог по рассмотренным темам. Были кратко исследованы и описаны следующие основные разделы:
- Архитектура систем промышленной автоматизации - были описаны и исследованы все основные уровни принятия решения в промышленном производстве. Описана последовательность передачи сигнала внутри сенсоров, актуаторов, ПЛК и АСУТП. Приведен пример технического задания на разработку системы АСУТП по управлению цехом холодной прокатки стали.
- Основные характеристики измерительных систем - приведен ряд статических и динамических характеристик измерительных систем (наши сенсоры). Дан краткий экскурс в погрешности, статистику, разрешающую способность и калибровку. Рассмотрены понятия передаточной функции, преобразования Лапласа, амплитудно-частотных характеристик и примеры использования данных понятий для описания работы сенсорных систем.
- Сенсоры для измерения температуры - приведены примеры работы нескольких типов температурных сенсоров: термометры на основе сопротивления (RTD, термисторы) и термопары.
- Сенсоры для измерения давления и силы - рассмотрена работа измерителей давления мембранного типа, мехов и трубок Бордона. Приведены различные способы измерения силы: тензодатчики, нагрузочная ячейка, удостоверяющее кольцо и кантиливерная балка.
- Сенсоры для измерения скорости и смещения - измерение смещения с помощью потенциометров, линейного дифференциального трансформатора, индуктивных датчиков, ротационного дифференциального трансформатора с переменной величиной, ресольвера, датчиков емкости, оптических датчиков. Кроме того приведены примеры измерения скорости с помощью оптического и индуктивного метода.
- Сенсоры для измерения потока - расходомеры по давлению (Вентури, орифиметр, вихревые и т.д.).
- Сенсоры измерения уровня, влажности и Ph.
Кроме этого кратко были рассмотрены цепи передачи сигналов от сенсоров к системам автоматизации. Приведены их общие схемы и пару задач на расчет ключевых характеристик. Не обошлось и без вводного раздела с основными определениями и так любой инженерами концепции "черного ящика". Описаны ключевые типы промышленных систем и систем автоматизации.
Надеюсь в рамках этого пособия в сон не клонило и прочитанный материал оказался полезен и интересен. В относительно ближайшее время попробую написать методичку по этому курсу и более подробно и физически-обоснованно раскрыть очень практическую и интересную тему работы автоматизированных систем неразрушающего контроля в промышленном производстве.
Буду рад любым замечаниям и предложениям по данному курсу!